感应加热电源Fuzzy和PI分段复合控制方法
2014-06-26吕淼李金刚
吕淼,李金刚
(西安理工大学自动化与信息工程学院,陕西西安710048)
感应加热电源的控制对象具有负载时变性、结构非线性的特点,因而难以建立精确的数学模型,采用传统的PID 控制无法达到很好的效果。模糊算法是一种非线性的控制算法,尤其适合感应加热电源的负载功率控制,但是,模糊控制器本身消除系统稳态误差的性能比较差,难以达到较高的控制精度[1-3]。因此,本文提出了Fuzzy 和PI相结合的分段复合控制算法,即Fuzzy-PI复合控制算法,由偏差的大小作为切换的条件,将Fuzzy 和PID 分别用于感应加热电源工作的不同阶段[4],对感应加热电源实施分段控制,使感应加热电源兼有Fuzzy 控制动态性能高和PID 稳态精度高的优点。
本文详细设计了Fuzzy-PI 复合控制器,搭建了基于Fuzzy和PI相结合的分段控制的感应加热电源平台,包括硬件部分与软件部分,完成了整个系统的实验、调试和结果分析。
1 Fuzzy-PI复合控制原理
1.1 Fuzzy-PI复合控制算法的提出
模糊控制算法可以有效地克服复杂系统的非线性及不确定特性,与传统控制相比有较强鲁棒性的优点,近年来取得了许多研究和应用的成果。
模糊控制器对于误差输入信号,要把它转化为误差论域上的点,即:

式中:e'为某时刻的输入误差;kl为误差的量程转换比例因子;n'为转化到误差论域上的点。由式(1)可见,当n'=0时,仍有:

即

式中:kl为误差信号的物理范围[-e,e]到误差论域{-n,-(n-1),…,0,…,(n-1),n}量程转换的比例因子,由式(1),kl=n/e。
于是上式变为

一般规范化的离散论域形式中常常取n=6或7,因此大约有:

也就是说|e'|在误差量程最大值e 的大约7%以内时,模糊控制器已经把它当做0来对待了,因此|e'|<7%e的稳态误差模糊控制器无法消除,这是控制点附近的控制上的盲区和死区。
PI调节器的积分调节作用从理论上可使系统的稳态误差控制为0,有着很好地消除稳态误差的作用。因此有人提出模糊控制和PI控制相结合的一种方案,即Fuzzy和PI相结合的分段复合控制。大偏差范围内采用模糊控制,可提高系统响应速度,克服系统非线性因素的影响;在小范围内采用Pl控制方式以获得较好稳态性能,其中比例调节P环节用于提高系统的响应速度,积分调节I用于消除静态误差,提高系统的无差度[5-6]。
1.2 Fuzzy-PI复合控制原理
在感应加热电源工作的开始阶段,反馈值与给定值的偏差远大于某一个阈值,此时为提高系统的响应速度,加快响应过程,用PI(比例-积分)控制;当偏差减小到这个阈值以下时,切换转入模糊控制,以提高系统的阻尼性能,减小响应过程中超调;然而由于模糊控制没有积分环节,因而最终必然出现稳态误差,所以在平衡点附近采用PI(比例-积分)控制,消除振荡,减小稳态误差,提高了灵敏度和控制精度。其结构如图1 所示。图1 中PI 为常规比例积分调节器,FLC 为模糊控制器。Fuzzy和PI相结合的分段复合控制的控制量u 在模糊控制器(FLC)输出和PID 控制器输出2者之间选取,切换依据为误差e的绝对值|e|的大小,当|e|大于等于设定阈值emax时,切换为FLC,否则切换为PID[7]。

图1 Fuzzy-PI复合控制结构图Fig.1 Structure of Fuzzy-PI compund control
2种控制方式在系统运行的过程中是通过和误差阈值K 的比较来分段切换使用的,其中误差阈值K的设定是关键,如果选得太大,则系统过早进入Pl调节过程,不能充分发挥模糊控制的快速性的作用,使调节过程变长;如果选得太小,则在系统快接近稳态的情况下进行切换,使得系统可能产生超调。
逆变器输出为

式中:0≤K≤1;data 为单独采用PID 算法或者模糊控制算法的输出值;data2为最终输出PID 算法和模糊算法的加权值。
并且,K=1时,采用PID算法控制系统,K=0时,采用模糊算法控制系统,这是2个临界值,也是目前研究热点并且逐步成熟的PID和模糊2种控制算法。
2 Fuzzy-PI复合控制器的研究与设计
2.1 PI控制器
PID 控制算法即比例-积分-微分控制算法。首先将模拟量离散化,得到PID控制的离散形式:

式(7)是位置式PID 控制算式。为了增加控制系统的可靠性,采用增量式PID控制算式,即让DSP 只输出控制量u(k)的增量Δu(k)。由式(7)可得增量式PID控制算式如下式所示:

令式中KD=0,则得到增量式PI控制算式:

其中

使用PI功率调节算法能够实现在不同谐振参数下感应加热电源的频率跟踪控制以及输出功率连续调节,选择合适的参数才能使系统避免大超调、不稳定、响应时间长以及积分饱和等不利现象的出现,并且具有较好的闭环控制特性。
2.2 模糊控制器
模糊控制是用模糊概念对系统进行描述、处理、控制的方法。模糊控制原理图见图2,主要包括4个部分:模糊化、规则库、推理运算和反模糊化。

图2 模糊控制器的基本原理图Fig.2 Basic principle of fuzzy controller
由图2可知,通过检测反馈功率P0,与前次采样的输入功率P相比较,求出其对应输入控制量的精确量功率偏差e 和功率误差变化率ec,对输入量e,ec论域上全部元素的组合,经过模糊化得到用隶属度函数描述的模糊量,依据人为经验建立的规则库映射,通过推理运算得到输出模糊量,再通过解模糊算法对模糊输出量进行解模糊,最后得到输出精确量用于感应加热电源功率控制。确定模糊控制规则再反模糊化,控制逆变器开关管驱动占空比,从而达到控制逆变器输出功率的目的。
2.3 Fuzzy-PI复合控制器
Fuzzy-PI 复合控制的基本原理如图3 所示。控制系统总的控制作用是模糊控制器的控制作用和PI 调节器控制作用的和。不难理解,这相当于一个具有变参数的比例微分控制作用和不变参数的模糊控制作用的综合。与常规PID 控制算法相比,大大提高了系统抗外部干扰和适应内部参数变化的鲁棒性、减小了超调、改善了动态性能;与单一的模糊控制算法相比,它减小了稳态误差、提高了平衡点的稳定度。不仅如此,Fuzzy 和PI 相结合的分段复合控制算法采用软切换(即柔切),避免了硬切换瞬间对系统稳定性的影响。

图3 Fuzzy-PI复合控制的基本原理图Fig.3 Basic principle of fuzzy-PI control
Fuzzy-PI 复合控制算法程序流程图见图4。

图4 Fuzzy-PI复合控制算法程序流程图Fig.4 Flow chart of Fuzzy-PI staged composite control
文献[8]对这种形式的控制方案模拟实验研究表明,它比单个的模糊控制器和单个的PID 调节器均有更好的控制性能。
本文Fuzzy 和PI 相结合的分段复合控制中Fuzzy算法的具体实现包括以下几个方面。
1)模糊化。功率偏差e 的基本论域为[-3,3],功率偏差变化率ec 的基本论域为[-3,3],由于文中逆变电路的驱动频率为20 kHz,故逆变电路开关管驱动PWM 的占空比u 的基本论域为[-3 000,3 000]。将基本论域离散化,得到相应的论域E,EC 和U。本文E,EC 和U 的论域均为{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。本文采用三角函数作为隶属函数,E,EC,U 的隶属函数曲线如图5所示。

图5 E,EC,U的隶属函数曲线图Fig.5 Membership function of E,EC,U
2)规则库。根据感应加热平台功率调节的实际具体情况,通过多次实验对不同的模糊规则表进行验证对比,最终制定了如表1 所示的模糊控制规则表。

表1 模糊控制规则表Tab.1 Rule table of fuzzy control
3)推理运算。本文采用最常用的二输入玛达尼推理法。该推理法通常有2 个输入量,分别是功率偏差e 和误差变化率ec。当一组功率偏差e 和误差变化率ec 的精确量输入模糊控制器时,对应多个隶属函数。每一组功率偏差e 和误差变化率ec 对应的隶属函数对应一条控制规则,选择功率偏差和误差变化率对应隶属函数最小的隶属度值作为这条控制规则输出隶属函数的隶属度。然后通过这种方法推理出这组偏差和误差变化率其他对应控制规则的输出隶属函数的隶属度,然后对所有的输出隶属度取并集,这个并集就是模糊控制器的最终模糊输出。
4)反模糊化。选择一个最能代表推理运算输出模糊量的精确量的方法就叫做反模糊化。常用的反模糊化方法有:重心法、最大隶属度函数法、系数加权平均法等。本文选择重心法进行反模糊化。
5)模糊控制表。功率偏差e和误差变化率ec的精确量经模糊化处理后为隶属度函数表示的模糊量,然后根据规则库和二输入玛达尼推理法得到模糊控制量,再根据所选反模糊化方法对模糊控制量进行解模糊,得出模糊控制表,由表2可知:每1 组误差精确量e 和误差变化率精确量ec对应1 个精确控制量u。将所得的模糊控制表基于DSP TMS320F2812 程序实现,根据误差e 和误差变化率ec在线查询模糊控制表,即可实现数字化模糊控制。

表2 模糊控制表Tab.2 Table of fuzzy control
3 实例实验与分析
3.1 Fuzzy-PI复合控制的感应加热电源的设计
以TMS320F2812 为核心,搭建了Fuzzy 和PI相结合的分段控制的感应加热电源主电路及控制电路,实现了外围检测调理电路、驱动电路、过压过流过热保护等。
感应加热电源的主电路拓扑如图6 所示,由频率跟踪电路控制逆变器的工作频率,使逆变器始终工作于谐振状态,逆变器输出功率因数接近于1,整机工作效率较高。采用Fuzzy-PI 调功控制算法,通过调节IGBT 管的驱动占空比调节输出电压,从而达到调节输出功率的目的。
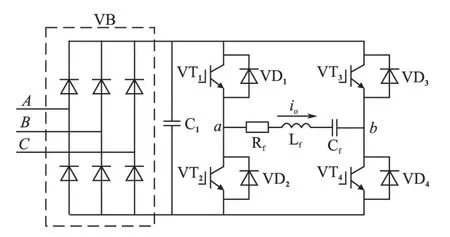
图6 感应加热电源主电路拓扑Fig.6 Main circuit topology of induction heating power supply
本文按照以下参数进行设计:输入为380 V/50 Hz三相交流电,电网电压波动范围±10%;输出功率10 kW;逆变器工作频率范围:20~50 kHz。
感应加热电源串联谐振负载最终选择电阻R=5.2 Ω,等效电感L=105 μH,补偿电容C=0.4 μF,即固有谐振频率等于24.6 kHz。
3.2 实验结果及分析
系统启动波形如图7所示。可以看出功率在25 ms 内上升到给定功率,上升过程功率变化稳定,超调量小,开关管VT1 上的驱动波形幅值迅速增大,进入相对稳定的工作状态。由此证明,基于Fuzzy-PI 算法控制的感应加热电源在很短的时间内就完成启动并达到稳定状态,功率调节波形超调很小,避免使用PI控制算法在系统启动过程中容易引起超调的特性。

图7 系统启动波形Fig.7 Waveforms of system startup
当功率误差e的绝对值|e|大于等于设定阈值emax时,系统为Fuzzy控制。选择系统参数M=0.78,N=0.008,数字锁相环控制效果最好,此时开关管上损耗最小,整机功率因数为1,电源运行最稳定。在恒功率闭环控制的作用下,得到图8所示功率给定和开关管驱动波形,可以看出,当功率给定减小时,逆变电路开关管驱动波形占空比相应减小。

图8 Fuzzy控制时功率给定和开关管驱动波形Fig.8 Given and buck drive waveforms when fuzzy control
当误差e的绝对值|e|小于设定阈值emax时,可以判断感应加热电源系统初步进入了稳态工作,此时,如果继续使用模糊控制算法,若要提高控制精度则必然增加量化级数,从而导致规则复杂以及搜索范围扩大,降低决策速度,甚至导致不能实时控制等问题。将控制算法切换为滞后校正特性的PI控制,在通过积分项来有效消除电源平台从一个工作稳态切换到另一个工作稳态时带来的稳态误差,可以避免继续使用模糊控制算法带来的不足。
在平台工作过程中,功率给定不变,改变负载串联电阻的大小。图9a、图9b中负载串联电阻分别为R=5.2 Ω,R=10 Ω。负载串联电阻的改变会引起负载电流的变化,从图9中可以看出,在闭环控制的作用下,逆变输出电压Uab与输出电流Io始终保持同频同相。
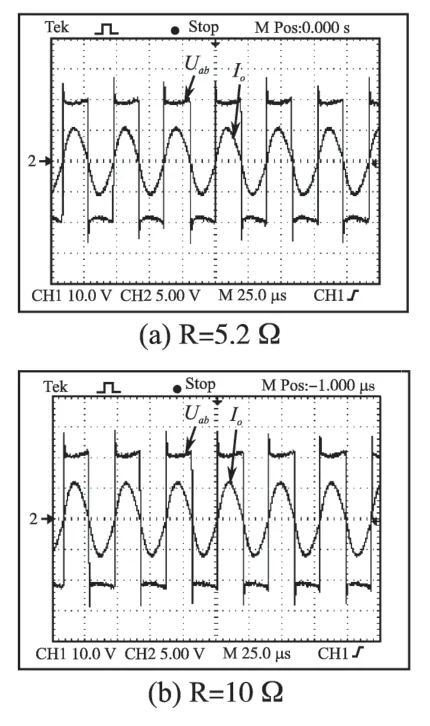
图9 PI控制时逆变输出电压电流波形Fig.9 Inverter output voltage and current waveforms when PI control
以上实验结果表明,感应加热电源逆变器输出电压与输出电流波形始终保持同频同相,并且具有非常好的稳定性和快速性。这表明将Fuzzy和PI分别用于感应加热电源工作的不同阶段,对感应加热电源实施分段控制,提高了灵敏度和控制精度。因此,本文设计的感应加热电源实验平台是正确可行的。
4 结论
本文综合了PI 控制和模糊控制的优势,提出了一种新型的Fuzzy 和PI 相结合的分段复合控制的方法,其优势在于,当感应加热平台处于启动阶段时,使用模糊控制算法,有效利用了其响应良好、动态性能高的特性;当平台工作进入较稳定的阶段,转而使用PI 控制,实现快速响应和高精度控制的目标,从而提高系统的稳定性和适应性。
根据设计搭建了Fuzzy-PI 复合控制的感应加热电源主电路及外围控制电路,完成了对整个系统的实验、调试和结果分析。实验证明本文提出的Fuzzy-PI 复合控制算法使系统具有较快的响应速度,同时具有较高的控制精度和较强的鲁棒性。
[1]胡兴柳.基于重复-模糊控制的逆变电源控制系统研究[J].电力电子技术,2009,43(3):57-59.
[2]张二岩.伺服阀控缸位置控制系统的模糊控制和模糊-Pl复合控制比较[J].液压气动与密封,2012,31(1):25-27.
[3]周伟,陈素华.模糊控制在无位置反馈再生气加热炉上的应用[J].电气传动,2012,42(10):59-61.
[4]郝炜亮,李凤海,许化龙.转台伺服控制系统的PID-模糊复合控制算法的研究[J].微计算机信息,2005,21(21):52-53.
[5]Hamane B,Benghanemm M,Bouzid A M,et al.Control for Variable Speed Wind Turbine Driving a Doubly Fed Induction Generator Using Fuzzy-PI Control[J].Energy Procedia.2012(18):476-485.
[6]Juang C-F,Lu C-F.Load-frequency Control by Hybrid Evolutionary Fuzzy PI Controller[J].Generation,Transmission and Distribution,IEE Proceedings,2006,153(2):196-204.
[7]张曾科.模糊数学在自动化技术中的应用[M].北京:清华大学出版社,1997.
[8]张峰.感应加热电源数字控制及智能控制方法研究[D].西安:西安理工大学,2007.
