一种多传感器融合事件识别算法❋
2014-06-24郭忠文胡乃军仇利克
郭忠文,王 玺,胡乃军,仇利克
(1.中国海洋大学信息科学与工程学院,山东青岛266100;2.青岛市工商信息中心,山东青岛266071)
一种多传感器融合事件识别算法❋
郭忠文1,王 玺1,胡乃军2,仇利克1
(1.中国海洋大学信息科学与工程学院,山东青岛266100;2.青岛市工商信息中心,山东青岛266071)
针对传感器网络中事件识别存在的误判问题,提出一种新的多传感器融合事件识别算法。算法通过对网络中产生的事件识别数据,进行统一的变换处理,建立可实时更新的基于概率的事件识别规则。算法有效提高了事件识别的成功率,利用实测数据进行仿真试验,验证了算法的有效性。
传感器网络;多传感器融合;事件识别;概率识别
近年来,多传感器融合技术在军事、工业等多个领域得到了广泛应用[1-2]。事件识别作为传感器网络的一项主要应用,也受到广泛关注。各种特定的传感器被研制出来,用于某一特定类型的事件识别,例如火焰传感器用于火灾识别,红外传感器用于入侵识别等。受环境的复杂性、变化性以及传感器的灵敏度、稳定性等因素影响,单一传感器环境下的事件识别容易失败。
在传感器网络中,多个不同类型的传感器与某一事件存在直接或间接的关系,例如同时安装火焰传感器和温度传感器,一旦火灾发生,火焰传感器会直接报警,同时温度传感器的监测值也会升高,而温度升高是火灾发生的一个必要条件。如果将多传感器融合技术应用于事件识别,将可以提高事件识别的成功率。
在多传感器融合事件识别方面,已经进行了一定研究。文献[3]提出一种合作检测协议,利用传感器和邻居节点的合作关系,来辅助事件识别。文献[4]提出一种用于无线传感器网络的两层事件识别算法,其核心也是利用了多传感器融合技术。火灾识别一直是事件识别应用中的热点,文献[5]应用SVM[10]算法对多传感器数据进行融合处理,提高了火灾报警成功率。相似的,文献[6]则采用C4.5决策树算法用于火灾识别。在医疗领域,多传感器融合技术也有应用,文献[7]中的应用场景为病人监控系统,选取了来自病人的若干体征参数用于报警,分别用Naive Bayes[8],Decision Trees[9],SVM[10],k NN[11],Multi-Layer Perceptron[12]等算法对数据进行处理,并比较了各种算法对误报率降低的贡献。
目前的研究存在以下不足:(1)认为传感器的输出为连续值,但实际中随着传感器技术的发展,传感器更加智能,许多传感器都对原始监测结果进行了处理,输出事件为是否发生的信号,即输出由连续值变为离散值。(2)算法针对某一类事件进行设计,通用性不够。(3)算法中的事件识别规则离线生成,无法实时更新,不能适应传感器及其所处环境的不断变化。
本文针对上述问题,提出一种新的多传感器融合事件识别算法,事件识别规则可以实时更新,并可在事件识别基础上,对传感器进行故障诊断。
1 数据收集和预处理
多传感器环境中,在不应用任何算法的情况下,事件识别规则为:任意传感器提示事件发生,则认为事件发生。在后文中,将这一规则称为“普通事件识别规则”。当某一传感器提示事件“发生”时,需要记录所有传感器的输出,以及事件是否真实发生。
生成本文算法中的事件识别规则,首先需要收集网络中产生的事件识别数据。数据收集完毕后进行数据预处理。数据预处理首要任务是找出哪些传感器与事件有关联,这一步可以借助相关分析等数学工具来完成。
数据预处理第二步为变换。用于事件识别的传感器,大部分输出为二元离散值,小部分输出为连续值。为了对数据进行统一处理,对于这些传感器,需要对其输出进行变换。
设X为传感器原输出,Y为变换后的输出,f为变换函数,则有如下公式:

式中:X为连续型变量;Y为离散型变量;f的具体形式需要根据具体应用场景来决定。不论变换形式如何,变换结果都是二元值。以下列举几种常用的变换函数。
当事件发生频率较低时,可计算传感器输出在正常情况下的最大值或者最大变化率,并以此作为区分事件是否发生的阈值。具体方法如下:
(1) 最大值
设传感器输出为x,最大值为outmax,变换后的输出为y,则有:

(2) 最大变化率
设在时间t内传感器输出的最大变化率为CRmax,则有:

公式(2)、(3)中,y=1代表事件发生,y=0代表事件未发生。
当事件发生频率较高时,可取事件发生时的传感器输出进行分析,得到特征值区间或者特征变化率区间。具体方法如下:
(3) 特征值区间
设传感器输出为x,当事件发生时,x∈(a,b),则有:

(4) 特征变化率
设在时间t内输出变化率为cr,当事件发生时,cr∈(a,b),则有:

公式(4)、(5)中,y=1代表事件发生,y=0代表事件未发生。
2 多传感器融合事件识别算法
多传感器融合事件识别算法的基本思路是:首先进行数据收集和预处理,然后对数据分析,得到基于概率的事件识别规则,最后应用规则进行事件识别,并在此基础上对传感器进行故障诊断。
2.1基于概率的事件识别规则
受传感器和环境的不确定性影响,采用普通事件识别规则,误报率较高,从而导致整体的事件识别成功率很低。
假设在某一应用场景中安装N个传感器,则所有传感器的输出组合共计2N种(数据预处理后)。每一种组合对应一个事件识别结果,即事件是否发生。
用i代表某一种组合,设P为当i发生时事件发生的概率,设Ci为i发生的次数,设C为当i发生时事件发生次数,基于统计规律则有:

用Y代表事件是否发生,则有:

公式(7)中,Y=1代表事件发生,Y=0代表事件未发生。事件识别规则生成算法(DR)见表1。
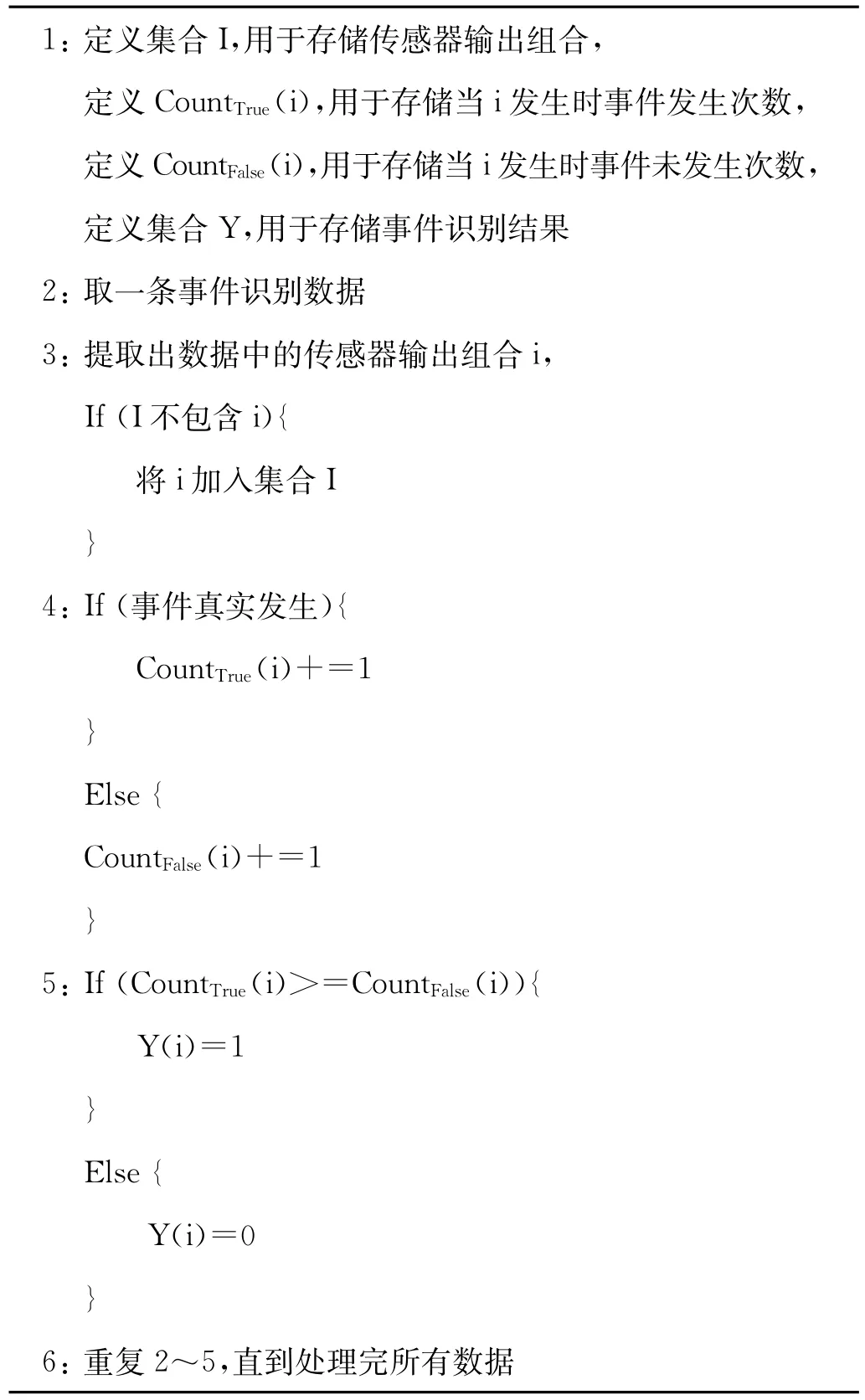
表1 事件识别规则生成算法(DR)Table 1 Detection rules generation algorithm(DR)
DR算法是在线完成的,当有新数据产生,就可以实时更新事件识别规则。
2.2事件识别步骤
事件识别规则生成后,就可以用于事件识别,具体步骤见表2。
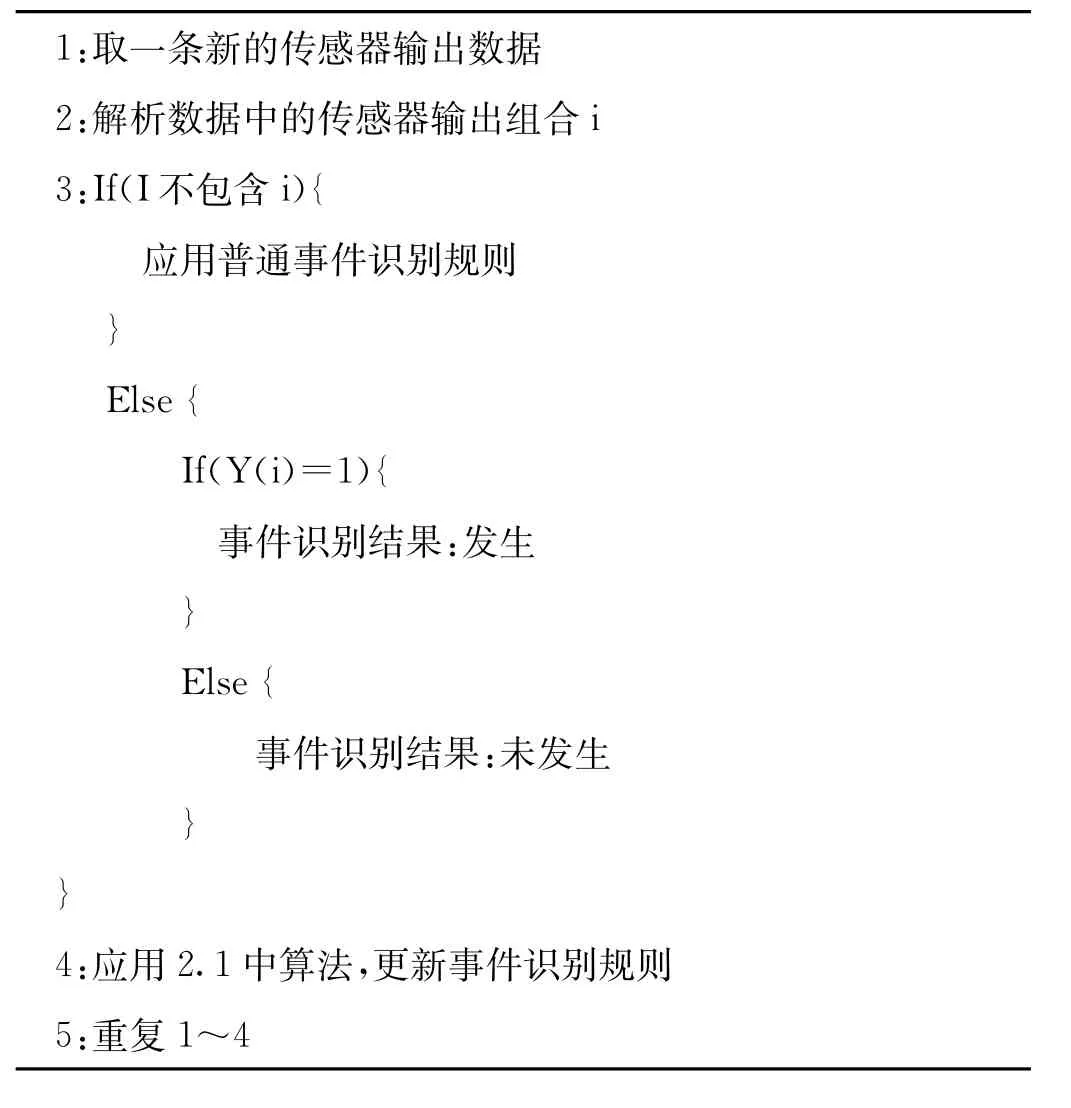
表2 事件识别步骤Table 2 Event detection procedures
2.3传感器故障诊断步骤
事件识别规则生成后,在进行事件识别的同时,也可以用于传感器故障诊断,具体的步骤见表3。
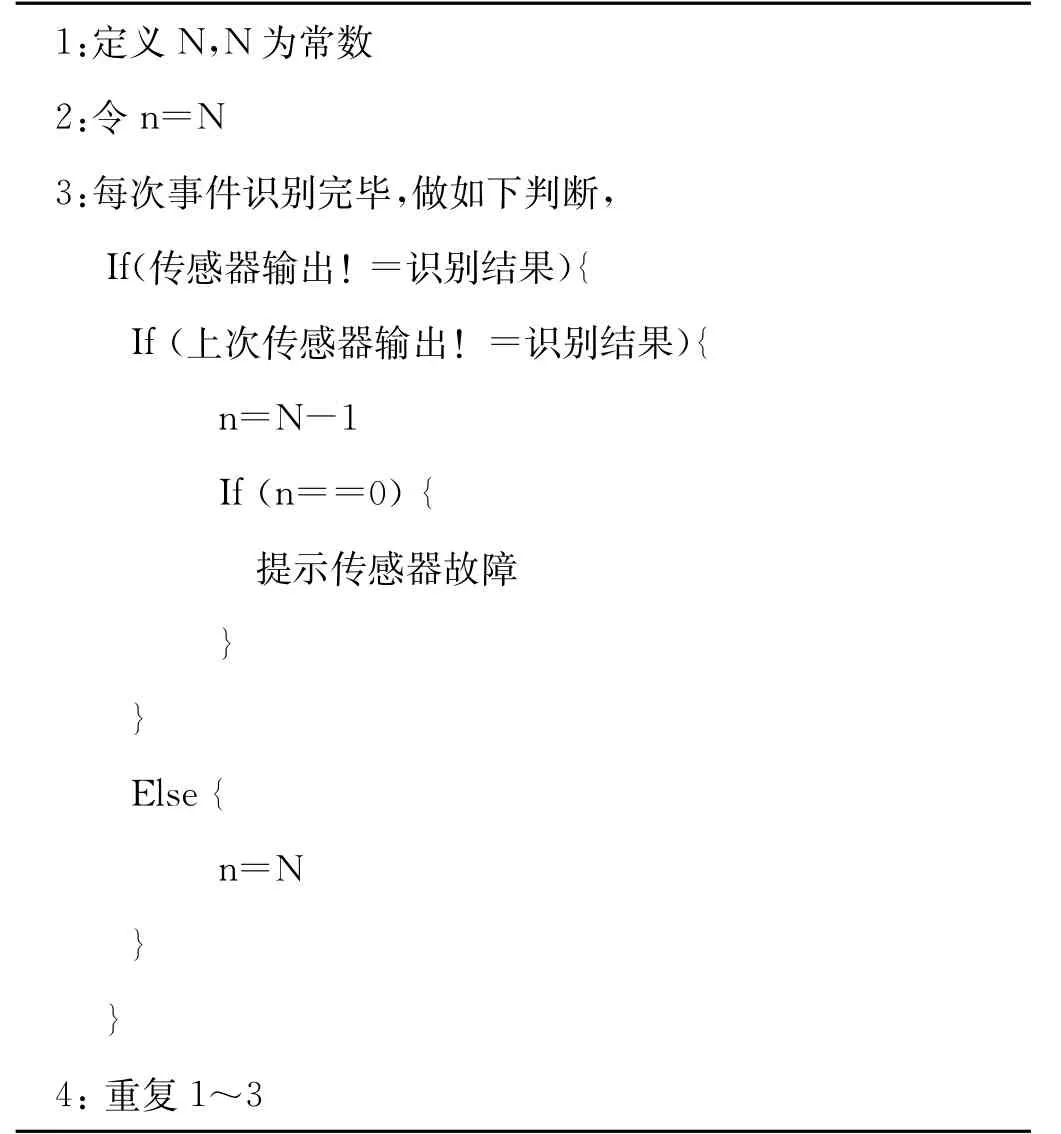
表3 传感器故障诊断步骤Table 3 Sensor fault diagnosis procedures
上述过程中,N一般可取N≥3。事件识别规则反映的是概率最大的事件发生可能,如果多次出现传感器输出与事件识别结果不一致,可以认为是小概率事件反复发生,因此可认为传感器出现故障。
3 仿真
使用2种不同应用场景的实测数据进行仿真:第一种应用场景为机房监控系统,系统用于对机房内的设备以及机房环境进行监控;第二种应用场景为火灾监测系统,系统通过使用多种传感器,监测火灾是否发生并采取相应措施。
3.1机房监控系统事件识别
在一个典型的机房监控系统中,在机房的入口处,通常会安装3种类型的传感器:红外传感器、门磁传感器以及摄像头,对出入机房的人员进行监测并报警。其中,红外传感器一般安装在机房入口处上方,利用红外原理感应是否有人进入,门磁传感器安装在门上,可以监测到门的开合,摄像头安装位置一般正对入口,其配套的客户端软件中,加入了图像识别算法,当有人进入时,客户端软件能够进行报警,因此摄像头和配套的客户端软件可以一同视为一种视频传感器。
试验环境中,每种类型传感器数目为1个,共选取了3 000条数据。每隔400条记录计算一次传感器报警漏报率和误报率,计算结果见图1。
分别应用本文提出的DR算法、SVM算法和C4.5决策树算法处理数据,遵循如下规则进行事件识别。
(1)使用前1 000条数据分别应用3种算法得到不同的事件识别规则。
(2)从第1 000条数据开始,DR算法在识别同时,持续更新识别规则,并用于后续数据的事件识别。
(3)对于SVM和C4.5决策树算法,在识别第2 000条数据时重新生成事件识别规则,然后用于识别第2 000到第3 000条数据。
识别第1 000~3 000条数据时3种算法事件识别成功率对比见图2。
3.2火灾监测系统事件识别
火灾监测系统中选用4种传感器:烟雾传感器、CO传感器、温度传感器、光传感器进行事件识别。其中,烟雾传感器根据烟雾浓度来识别事件,CO传感器根据CO气体浓度来识别事件,温度传感器根据温度变化趋势及数值来识别事件,光传感器根据单位时间内光强变化率来识别事件。
试验环境中,温度传感器数目为2个,其他类型传感器各1个,共选取2 000条数据。每隔100条记录计算一次传感器报警漏报率和误报率,计算结果见图3。
分别应用本文提出的DR算法、SVM算法和C4.5决策树算法,遵循如下规则进行事件识别。
(1)使用前500条数据分别应用3种算法得到不同的事件识别规则。
(2)从第500条数据开始,DR算法在识别同时,持续更新识别规则,并用于后续数据的事件识别。
(3)对于SVM和C4.5决策树算法,分别在第500、1 000、1 500条数据时重新生成事件识别规则,并分别用于识别第500~1 000条,第1 000~1 500条,第1500~2000条数据。算法事件识别成功率对比见图4。
2种不同应用场景的试验结果显示,在试验环境和传感器自身特性均不断变化的情况下,采用基于概率的事件识别规则,事件识别成功率优于其他2种分类算法。

图1 传感器误报率和漏报率变化Fig.1 Change of the sensors’false negative rate and false positive rate

图2 事件识别成功率对比Fig.2 Success rate comparison

图3 传感器误报率和漏报率变化Fig.3 Change of the sensors’false negative rate and false positive rate

图4 事件识别成功率对比Fig.4 Success rate comparison
4 结语
对网络中的事件识别数据进行分析和处理,得到基于概率的事件识别规则,用于事件识别和传感器故障诊断。事件识别规则可实时更新,事件识别成功率较高。本文提出的多传感器融合事件识别算法对所有的事件识别应用场景是通用的,但算法的实际效果需要在更多应用场景中验证,然后做进一步的改进。
[1] MaciiD,Boni A,De Cecco M,et al.Tutorial 14:multi-sensor data fusion[J].Instrumentation&Measurement Magazine,IEEE,2008,11(3):24-33.
[2] BahadorKhaleghi,AlaaKhamis,Fakhreddine O,et al.Multi-sensor data fusion:A review of the state-of-the-art[J].Inf Fusion,2013,14(1):28-44.
[3] SkanderBanaouas,Mühlethaler P.Sensor collaboration in event detection[C].Santa Barbara:IEEE International Conference on Distributed Computing in Sensor Systems Workshops-DCOSSW,2010.
[4] Majid Bahrepour,Nirvana Meratnia,Paul J,et al.Sensor fusionbased event detection in Wireless Sensor Networks[C].Toronto:Mobile and Ubiquitous Systems:Networking&Services,MobiQ-uitous,2009.
[5] Hairong Wang,Dongmei Li,Yun Wang,et al.Fire detecting technology of information fusion using support vector machines[C].Nanjing:Artificial Intelligence and Computational Intelligence(AICI),International Conference on,2010,2:194-198.
[6] Liu Weili,Wang fan,Hu Xiaopeng,et al.Detection of fire based on Multi-Sensor Fusion[C].Harbin:International Conference on Computer Science and Network Technology,2011.
[7] Benedikt Baumgartner,KoljaRodel,AloisKnoll.A data mining approach to reduce the false alarm rate of patient[C].San Diego:Annual International Conference of the IEEE EMBS,2012.
[8] Pat Langley,Wayne Iba,Kevin Thompson.An analysis of bayesian classifiers[C].San Jose:National Conference on Artificial Intelligence-AAAI,1992:223-228.
[9] Murthy S K.Automatic construction of decision trees from data:a multi-disciplinary survey[J].Data Mining and Knowledge Discovery,1998,2(4):345-389.
[10] Cristianini N,Shawe-Taylor J.An Instruction to Support Vector Machines and Other Kernel-based Learning Methods[M].Cambridge:University Press,2000.
[11] Cover T M,Hart P E.Nearest Neighbor Pattern Classification[J].Cambridge:Knowledge Based Systems,1995,8(6):373-389.
[12] Christopher M,Bishop.Neural Networks for Pattern Recognition[M].New York:Oxford University Press,1995.
An Event Detection Algorithm Based on Multi-Sensor Data Fusion
GUO Zhong-Wen1,WANG Xi1,HU Nai-Jun2,QIU Li-Ke1
(1.College of Information Science and Engineering,Ocean University of China,Qingdao 266100,China;2.Information Center of Qingdao Administration Bureau for Industry and Commerce Qingdao 266071,China)
To solve the misjudgmentproblem of event detection in sensor networks,this paper proposesd an event detection algorithm based on multi-sensor data fusion.The algorithm was based on the event detection data in the network,transformed the sensors’outputs into binary values,and obtainsed the classification rules based on probability which could be updated online.The algorithm effectively improves the accuracy of event detection.This paper uses real data to do the simulation,verifies the effectiveness of the algorithm.
sensor network;multi-sensor fusion;event detection;probabilitydetection
TP202
A
1672-5174(2014)10-0155-06
责任编辑 陈呈超
国家自然科学基金项目(61379127;61170258)资助
2014-07-20;
2014-09-15
郭忠文(1965-),男,教授,博导。E-mail:guozhw2007@163.com