纯电动汽车驱动系统设计理论与应用
2014-06-24苗志威郑逢良牛鑫
苗志威 郑逢良 牛鑫
(河南龙瑞新能源汽车有限公司技术中心)
为解决当前全球面临着大气污染和能源短缺的危机,世界各国的汽车制造商都投入了大量资金开发纯电动汽车,我国也早在2001年设立了“电动汽车重大科技专项”。在此背景下,某新能源汽车有限公司于2010年5月开始,相继推出了6 款纯电动汽车,并成功投放市场。基于该公司某款纯电动汽车项目的研发过程,文章对纯电动汽车主要零部件的设计方法进行了总结。
1 驱动系统
纯电动汽车的驱动系统包括驱动电机及其控制器、减速器及动力电池组等,驱动系统的技术参数由纯电动汽车动力性能指标决定。
1.1 驱动电机参数确定
纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车车速和爬坡度等动力要求。
1.1.1 满足最高车速时驱动电机的功率
当纯电动汽车在水平路面上以最高车速匀速行驶时,忽略加速阻力[1],电机输出功率应至少为:
式中:P1——最高车速时驱动电机功率,kW;
ηt——整车动力机械系统传动效率;
m——整车满载质量,kg;
f——滚动阻力系数;
Cd——空气阻力系数;
A——迎风面积,m2;
g——重力加速度,9.8 m/s2;
umax——最高车速,km/h。
1.1.2 满足爬坡性能时驱动电机的功率
汽车以车速ua爬坡(角度α)行驶时,驱动电机所提供的功率至少为[2]:
式中:P2——满足爬坡性能时驱动电机功率,kW;
α——爬坡角度,(°);
uα——爬坡时最低车速,km/h。
1.2 减速器参数确定
在纯电动汽车减速器传动比的选择中,应根据汽车最高行驶车速和电机最高转速计算最大传动比,根据最大爬坡度和电机最大扭矩计算最小传动比[3]。纯电动汽车一般采用电机与减速器直接相连,没有变速器,其主要原因是:一方面电机特性比发动机好,可以在电机控制器的调节下实现相应功能;另一方面节约成本,并简化驾驶员的操作。对于没有变速器的纯电动汽车的减速器,其传动比可以在最小传动比和最大传动比的理论计算值之间选取,并考虑使用成本等因素。
由最高行驶车速和驱动电机最高转速确定减速器传动比(i1)为:
式中:nmax——驱动电机最高转速,r/min;
rd——车轮滚动半径,m。
由最大爬坡度和电机最大扭矩确定减速器传动比(i2)为:
式中:Ft——整车驱动力,N;
Tmax——驱动电机峰值扭矩,N·m。
在电动汽车满足最大爬坡度的条件下,式(4)中的Ft应为:
式中:Ff——滚动阻力,Ff=mgfcos αmax,N;
FW——空气阻力
Fi——坡道阻力,Fi=mgsin αmax,N;
uαmax——汽车最大爬坡度时的速度,km/h;
αmax——汽车最大爬坡角度,(°)。
电动汽车减速器的传动比选择应满足:i2≤i≤i1。
1.3 动力电池数量确定
动力电池的数量通常由汽车行驶性能和电机额定电压决定[4]。电机电源等级一般为12 V 的整数倍,为了满足互换性和通用性的要求,电池组电压要与电机电源要求一致。如果动力电池数量过多,会增加电池组的体积和质量,同时也影响电动汽车成本。但是如果动力电池数量电压过少,则会影响电动车的行驶性能,不能满足相关国标要求。因此要求在进行系统设计时,需要通过精确的计算来选择合适的方案。
1.3.1 按功率需求确定动力电池数量
动力电池数量的选择需满足电动汽车行驶的功率要求。电动汽车行驶功率由电机功率和电动汽车附件功率组成。其中,电动汽车附件包括12 V 蓄电池的充电、电动刹车助力系统、电动转向助力系统、电动空调系统、整车仪表、整车灯光、音响系统及雨刮等。因此,计算满足电动汽车总功率要求时的电池数量(np)为:
式中:Pt——电动汽车总功率,kW;
Ps——单体动力电池功率,kW;
Usmax——单体电池最高电压,V;
Ismax——单体电池最大放电电流,A。
1.3.2 按行驶能量需求确定动力电池个数
动力电池数量的选择同时还需满足电动汽车行驶的能量需求。
纯电动汽车一次完整充电后,以匀速行驶的全续驶里程,所需的能量(Wt/kW·h)可由式(6)计算:
式中:Pel——汽车最大行驶里程时的总功率,kW;
t——汽车全里程行驶时间,h;
ηmc——电机及控制器工作效率;
uel——汽车最大行驶里程时行驶速度,km/h;
S——汽车最大行驶里程,km。
单体动力电池的能量(Ws/kW·h)可由式(7)计算:
式中:U——单体电池电压,V;
C——单体电池容量,A·h。
满足电动汽车行驶能量需求时的动力电池数量(n)e为:
最后,动力电池的数量取np和ne之中的最大值。
2 某款纯电动汽车项目的研发
2.1 整车参数
该公司某款电动汽车属M1 小型乘用车,依托于传统的微型车,在保留原有的车架和悬架系统的基础上,采用驱动电机和动力电池组成的电力驱动系统,来取代传统的发动机和燃油系统构成的动力系统,其整车基本参数,如表1所示。

表1 整车基本参数
2.2 整车动力性能指标
基于GB/T 28382—2012《纯电动乘用车技术条件》,该公司该款电动车的整车动力性能指标,如表2所示。

表2 整车动力性能指标
2.3 动力系统技术参数
2.3.1 驱动电机的选择
综合考虑电动汽车性能及各电气附件的功率要求,再结合现有配套体系,该车选用永磁直流无刷电机作为驱动电机。根据式(1)和式(2)计算得:P1=10.8 kW,P2=19.8 kW,根据计算结果选择电机的额定功率和峰值功率分别为11,22 kW。基于满足实际需求和成本因素,选择现有适合的驱动电机,其参数如表3所示。
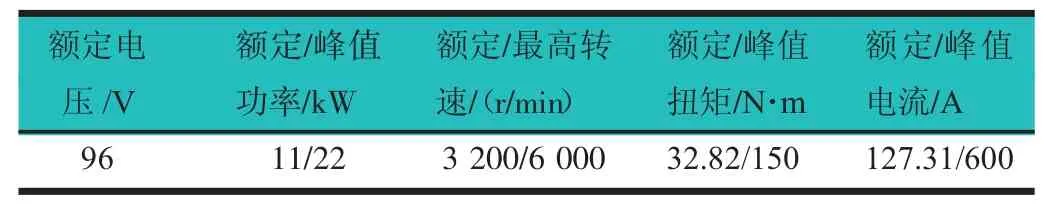
表3 驱动电机参数
2.3.2 减速器传动比的选择
减速器速比的确定实际跟电机最高转速和峰值扭矩的选择之间存在一个反复验证的关系。根据常用减速器的比值来大致确定电机的最高转速和峰值扭矩,当电机的参数确定后,再反过来计算减速器的速比。
根据式(3)计算得出:i1=8.06。
在对式(4)进行计算时,由于 uαmax很小,因此可忽略FW,计算得出i2=7.15。
电动汽车减速器的传动比满足:i2≤i≤i1,最终选取i=8。
2.3.3 动力电池数量的选择
结合配套体系及研发成本,动力电池采用铅酸电池,单体电压为12 V,容量为150 A·h。
式(5)中,Pt约为 15.5 kW,Usmax取 13.1 V,Ismax最大放电电流的数值取2C,可得np=3.95。
在计算式(6)~(8)时,同样需要考虑电气附件所消耗的功率,可得:ne=7.69。
最终,ne取8 个,动力电池组电压为12 V×8=96 V,符合驱动电机额定电压96 V 的要求。
2.4 驱动电机参数及减速器传动比的验算
2.4.1 最大爬坡度
计算最大爬坡度时,可忽略 FW,令:cos αmax=1,可得:所以代入数据得:αmax=12.5°。
故所计算的最大爬坡度为:100%tan αmax=22.2%>20%,符合电动汽车最大爬坡度的动力指标。
2.4.2 加速能力
0~50 km/h 起步加速时间(t1/s)为[5]:
式中:δ——旋转质量换算系数,取1.02;
u——汽车爬坡速度,km/h;
Tp——驱动电机扭矩,N·m。
代入相关数据计算得出:t1=9.1 s<10 s。
用相同的方法计算50~80 km/h 超车加速时间:t2=14.3 s<15 s。
综上,所计算电动汽车的加速能力符合整车动力性能指标。
3 结论
驱动系统的设计影响到纯电动汽车的动力性能指标。文章以汽车行驶动力学为理论依据,根据整车动力性能指标,结合企业配套体系,在满足国家标准对纯电动汽车动力性能要求的前提下,选择确定了驱动系统各主要零部件。实际运用表明:此方法对纯电动汽车驱动系统的选择匹配是合理的,同时也为纯电动汽车的动力性能预测和分析提供了一种切实可行的方法。
