基于模糊推理理论的线控系统网络健康度研究
2014-06-22苏笑然廖承林王丽芳
李 芳 苏笑然 廖承林 王丽芳
(中国科学院电力电子与电气驱动重点实验室 中国科学院电工研究所 北京 100190)
1 引言
随着现代电子技术的不断发展,汽车电子正向智能化控制的方向发展,并采用总线将各种汽车电子控制模块连接成为车载网络,可以不需要传统的机械机构传递控制信号,而是利用电子手段来驾驶汽车,这一电子手段就是线控技术[1]。线控技术的不断应用为汽车内部通信带来便利与智能化的同时,也给汽车电子的发展带来了新的挑战[2]。由于直接关系到汽车的安全性,它对于所包含的每个部件的可靠性都要求极高,尤其包括起到关键传输作用的总线通信技术[3]。线控系统一般采取时间触发的通信协议[4]。典型的时间触发的包括 TTP/C,TTCAN,Flexray[5]。由于 Flexray在物理上通过两条分开的总线通信,每一条的数据速率是10Mbps,总数据速率可达到20Mbps,而且Flexray具备的冗余通信能力,可实现通过硬件完全复制网络配置,并进行进度监测,具有高速、可靠及安全的特点,所以一般的线控系统都选择Flexray总线进行通信[6]。传统的在线诊断系统中,只有一些非常明显的故障会被检测出来,比如说一些物理故障短路断路的情况[7]。这就可能出现一个问题,即使总线上有错误存在,但是只要这些错误不影响正常的通信,错误数量就是在可接受范围内,在线诊断系统就无法发现这些隐含的故障,这些问题逐步累积,很有可能引发系统无法正常通信[8]。所以说,对于线控系统网络来说,一个合理的在线诊断策略对于保持线控系统正常的通信过程,系统的可靠性和安全性都是很有必要的。
目前国内外对于网络的在线诊断研究主要就是利用网络管理[9]。目前已经应用比较广泛且成熟的是符合OSEK规范的网络管理系统。OSEK网络管理系统分为直接网络管理和间接网络管理两种模式。其中直接网络管理使用特定的网络管理报文,利用令牌环机制监控网络。网络中所有节点构成一个逻辑环,节点通过发送NMPDU进行网络管理。间接网络管理不需要 NMPDU,而是通过监控节点的周期性应用报文,实现网络的监控。节点发送的周期性应用报文被成功接收即被认为在线,在预定时间内没有被成功接收即被认为离线[10]。OSEK网络管理虽然没有指定总线类型,但是其特性决定了其只适合于事件触发的总线协议(如 CAN总线)而不能用于时间触发类协议,因为节点网络管理状态的转换和执行基于定时器的超时,无法与时间触发类总线的通信周期同步[11]。
本文针对线控系统的 Flexray总线开展研究,以提高线控系统网络通信技术的可靠性与实时性为目标,研究线控系统网络通信的建模方法,同时引入网络健康度这个概念[12],代表线控系统网络的运行情况,提出一种自适应神经模糊理论的线控系统网络健康度预测的方法,基于通信过程中的网络参数,对网络的健康度进行合理的判断。在以后的研究工作中,可以进一步参考网络管理系统,设计适用于线控系统时间触发类总线的在线诊断策略,更进一步提高线控系统网络系统的可靠性。
2 自适应神经模糊推理系统
模糊推理系统(FIS)通过使用隶属度函数,把精确的数值映射为容易理解的语言表达,如“优”,“良”,“差”。FIS不依赖精确数学分析,从人类专家的经验知识和推理过程中提出 If-Then规则建立起模糊模型,以此为基础设计模糊控制系统[13]。然而,仅仅依靠人类知识,很难选择出适当的隶属度函数的形状和个数。如果利用自适应神经模糊推理系统(ANFIS),把已知的通信故障的数据进行离线的训练,然后把训练得到的模糊控制规则和隶属度函数嵌入到模糊控制模块中,就能够最大限度的减少训练误差,提高系统的精确度和可靠性[14]。
ANFIS使用 Sugeno算法,算法包含五层[15]。图1就为双输入单输出的一阶Sugeno的算法模型。

图1 ANFIS系统算法示意图Fig.1 The structure diagram of ANFIS algorithm
对应五层模型,每一层的算法分别如下:
第一层:

第二层:

第三层:

第四层:

第五层:

其中,第一层负责输入信号的模糊化,其中输入信号分别为x和y,Ai和Bi为对应的模糊集,输出就是对应的隶属度函数,选择为钟形函数
这里的 ai,bi,ci为前提参数,隶属度函数的形状就由前提参数来确定;第二层输出的隶属度函数相乘,计算各条规则的可信度M;在第三层得到归一化的可信度N;第四层进行去模糊化,其中 pi,qi,ri;最后一层来计算系统的总输出 f,只要给定了前提参数,ANFIS的输出就可以表示为结论参数的线性组合。
混合学习算法可分为两个步骤:
(1)确定前提参数的初始值,用最小二乘法计算结论参数。式(5)进行变形可得到若已有P组输入输出数据对,且给定前提参数,则矩阵 A,X,f的位数为 P×6,6×1和 P×1。一般的,样本数据个数远大于未知参数的个数(P>>6),使用最小二乘法可以得到均方误差最小(min||AX-f||)

意义下的结论向量的最佳估计 X*

(2)根据上一步骤计算得到的结论参数进行误差计算,采用前馈神经网络中的 BP算法,将误差由输出端反向传到输入端,用梯度下降法更新前提参数从而改变隶属函数的形状。
3 线控系统网络建模健康度仿真研究
3.1 线控系统的自适应神经模糊推理系统建模
ANFIS系统最大的好处就是不需要人为定制模糊控制规则,而是可以根据得到的数据选择不同形状和数量的隶属度函数进行训练,再根据训练的结果选择出合适的模糊控制规则。
选择自适应模糊推理系统选择为三输入单输出系统,如图2所示,其中输入选取网络运行过程中的信号周期,丢包和通信错误三个指标,输出就为网络的健康度。
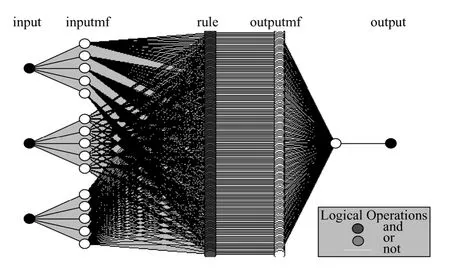
图2 线控系统的三输入单输出的ANFIS模型结构Fig.2 Structure of three-input-ANFIS model for x-by-wire system
网络运行过程中得到的数据输入到Matlab的anfisedit中,选择输入的隶属度函数5个,而且是高斯形状,BP算法循环400个epoch,就可以得到图3所示的训练误差图,可以看到,训练的误差基本为0,这种情况下得到的模糊控制规则是可用的。
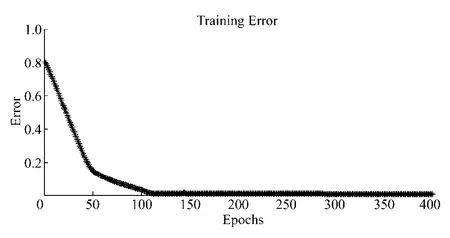
图3 ANFIS系统数据训练误差Fig.3 Data training error of ANFIS
3.2 线控系统网络建模
TrueTime是基于Matlab/Simulink的工具箱,包含网络模块和内核节点,其中网络模块选择需要的Flexray或者TDMA,内核模块则根据需要选择不同的数量,分别作为网络中的传感器,执行器和控制器,通过编写的代码,嵌入内核模块中,从而执行所需要的数据计算和信号传递。最终建立如图4所示的线控系统网络健康度监测的 TrueTime仿真模型。
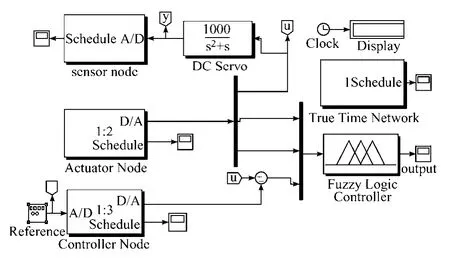
图4 线控系统的TrueTime仿真模型Fig.4 The TrueTime model for x-by-wire system
3.3 线控系统网络健康度预测仿真结果
把3.1训练好的模糊控制规则嵌入到3.2中搭建的Fuzzy Logic Controller模块中,可以对线控系统的网络健康度进行实时的预测,进行判断当前网络是否适合于通信。
在线控系统网络健康度监控仿真模型中,可以通过改变系统的丢包率或者加入干扰节点来实现。配置两种处于不同条件的网络,第一个网络不加任何干扰因素,第二个则改变网络的丢包率,加入随机的延时和干扰。这样在模拟的 Flexray的通信过程中,信号的周期,丢包的个数和错误的情况就会出现,网络的健康度也会发生变化。
所以,当线控系统网络是健康的,模糊控制器的输出为1,如图5a。网络条件改变时,健康度也发生变化,如图5b所示。
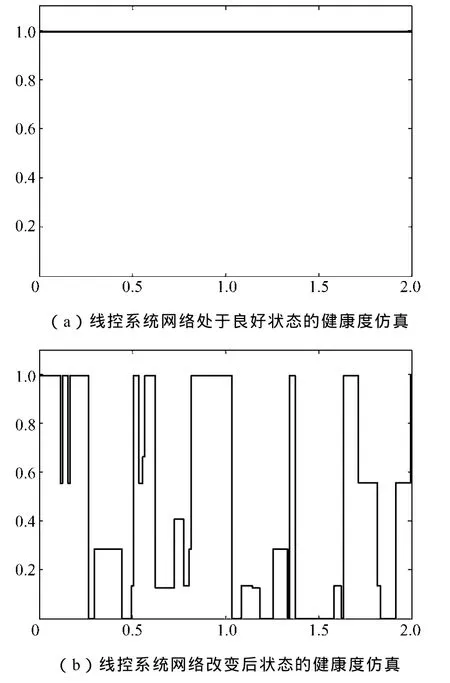
图5 线控系统仿网络两种状态下的健康度仿真Fig.5 Network health degree simulation when x-by-wire system in two different conditions
仿真的结果表明,ANFIS算法确实能够有效的对网络的健康度进行实时的预测和监控。但是更有力的验证还需要在实验中完成。
4 线控系统网络健康度预测实验验证
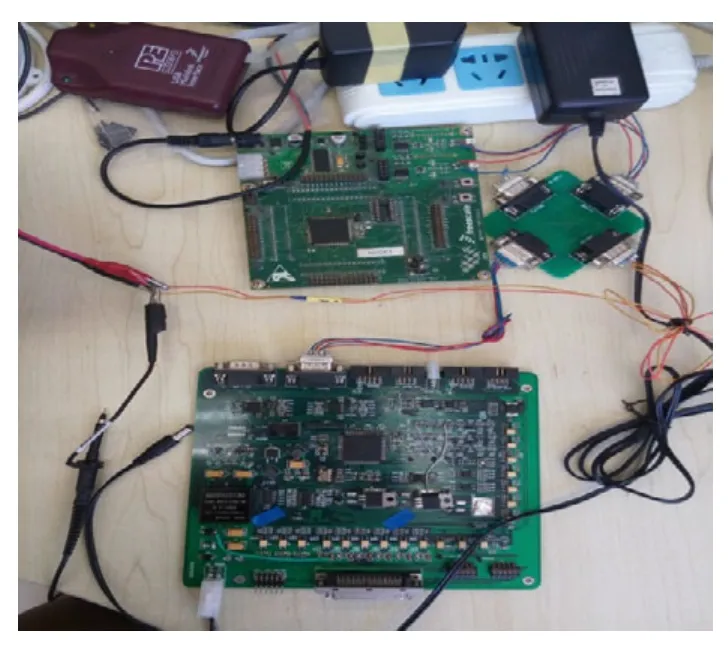
图6 基于XF512单片机的Flexray网络硬件电路Fig.6 The hardware circuit of Flexray Network based on MCU XF512
实验过程利用Flexray通信的飞思卡尔的16位单片机MC9S12XF512搭建硬件电路,如图6所示。通过对两个节点进行配置,完成正常的信号传输。然后通过错误注入和总线干扰等相关的设备设计实验条件制造总线上的传输错误,通过对输出的网络健康度的监控,验证自适应模糊神经算法的可行性,进一步完善线控转向系统网络在线故障诊断策略。
4.1 Flexray两个节点配置过程
首先需要进行的是对两个Flexray节点的配置。这就包含了每个节点时间参数相关的配置和两个节点相应通信过程的配置。
Flexray通信周期选择为 1.25Mbps,对应的通信周期为40ms。其中节点一植入源码公开的操作系统μC/OS-II,第三部分中生成的模糊控制系统通过Matlab的code generation工具,生成适合于S12(X)系列单片机的代码,加入到操作系统定义的某一项任务里面,通过自通过切换不同的任务计算得到网络健康度。
节点二则进行网络中信号的提取和采集,加入FreeMaster作为监测工具,可以实时观察开发板输出信号的波形。Flexray时槽状态需要通过读取时槽状态寄存器SSR来得到。SSR为16位寄存器,前八位和通道B相关,后八位和通道A相关,表1所示的就是和通道A相关的4种不同的错误类型和其他的标志位。

表1 时槽状态寄存器的内容Tab.1 The content in slot status register
实验的过程采用A通道单独通讯,通过调用两个函数:
Fr_get_slot_status_reg_value
Fr_get_channel_status_error_counter_value
状态寄存器和错误计数器的数值就可以经由节点二时槽直接发送到节点一中。节点一经过模糊算法就得到网络健康度,传递到节点二中,可以由FreeMaster动态读取。
4.2 实验结果
在网络不加任何干扰信号的情况下,系统通信正常,通过FreeMaster观测的线控系统网络健康度保持为100,如图7所示。

图7 Flexray总线上不加任何干扰时的网络健康度Fig.7 The network health degree when no inference is added on Flexray bus
然后通过信号发生器,在总线上面加入随机噪声干扰。观察对应的时槽状态寄存器,各种错误标志位都开始出现为1的情况。时槽状态寄存器的数值也由正常时的 0xF0F0发生变化,表 2就列举了在总线加入干扰之后出现的一部分错误。
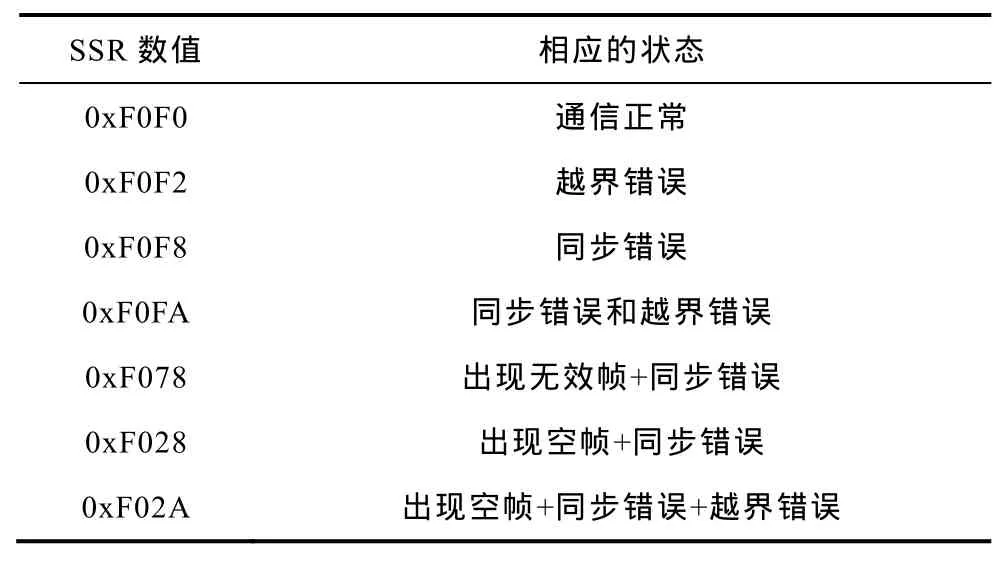
表2 加入随机干扰以后的时槽状态Tab.2 The slot status when in random inference
另外,对于单片机中定义了与AB两个通道相关的错误计数器 CASERCR和 CBSERCR。不管是出现那种错误,错误计数器就会自动加一,所以可以直接用来做错误统计。
随着通信过程中 Flexray总线上面错误数目的增加,网络的健康度也随之下降,如图8所示。
5 结论
线控系统的网络健康度的监控可以作为预测的重要组成部分,可以及时发现错误或故障情况。仿真和实验的结果证明这种基于自适应神经模糊推理系统的网络预测算法是可行的。网络中提取的参数输入到自适应神经模糊推理系统中,得出实时的网络健康度,作为网络通信情况的重要指标,当这一指标处于合理的范围之内时,就可以认为通信是正常的,超过这一范围,就可以发现网络中存在的故障,在通信中断之前提前发现异常的情况。
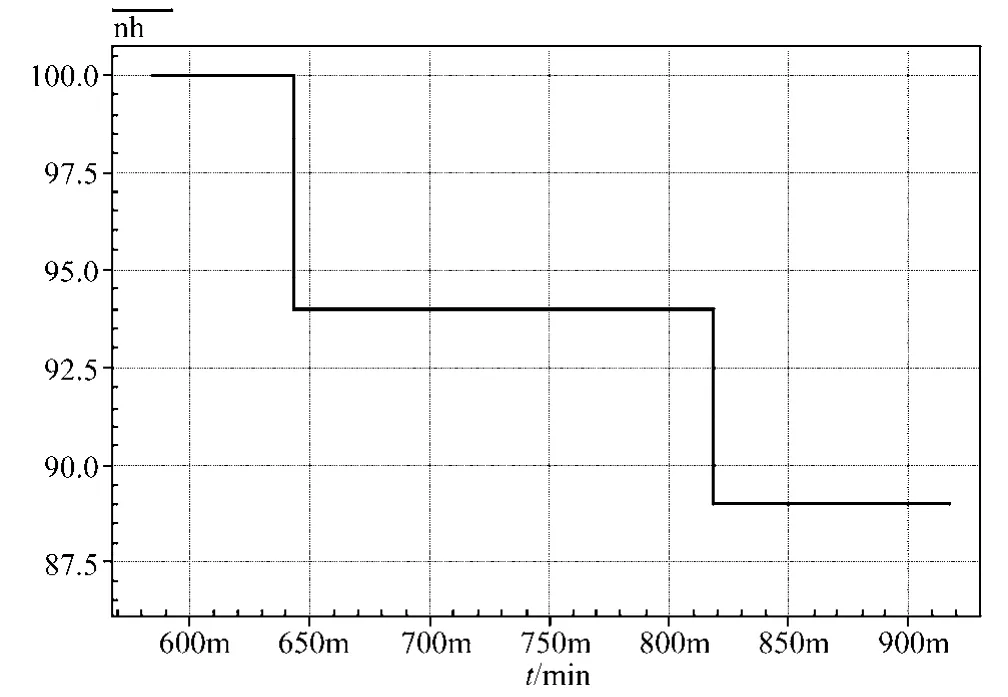
图8 Flexray总线上加入随机干扰时网络的健康度Fig.8 The network health degree when random noise is added on Flexray bus
未来的工作集中在把算法应用于线控系统的硬件平台上,根据网络控制单元的多样化问题,进行完善这个基于自适应神经模糊推理系统的网络健康度的实时监控和预测系统的算法。
[1] Naidu M Gopalakrishnan S,Nehl T W.Fault-tolerant permanent magnet motor drive topologies for automotive X-By-wire systems[J].IEEE Transactions on,Industry Applications,2010,46(2): 841-848.
[2] Chen Xin,Zhang Guixiang,Design of steering-by-wire system based on OSEKturbo real-time operation system[J].2012 International Conference on,Computer Science & Service System(CSSS): 2114-2117.
[3] R Hayama,M Higashi,S Kawahara,et al.Fault-tolerant automobile steering based on diversity of steer-by-wire,braking and acceleration[J].Reliability Engineering & System Safety,2010,1(95):10-17.
[4] SF Geng,QF Peng,LF Wang,The research of steer by wire system based on fuzzy logic control[C].Applied Mechanics and Materials.2011.
[5] Mane S P,Sonavane S S.A review on steer-by-wire system using Flexray[C].Wireless Communication,Vehicular Technology,Information Theory andAerospace & Electronic Systems Technology(Wireless VITAE),2011 2nd International Conference on 2011.
[6] C Wang,F Zhang,J Hua,Measurement and transmission of steering wheel angle based on FlexRay[J].Energy Procedia,2011,11: 779-785.
[7] Suwatthikul J,McMurran R,Jones R,In-vehicle network level fault diagnostics using fuzzy inference systems[J].Applied Soft Computing,2011,11:3709-3719,
[8] Kim MH,Lee S,LeeA KC.Fuzzy predictive redundancy system for fault-tolerance of x-by-wire systems[J].Microprocessors and Microsystems,2011,5(35): 453-461.
[9] L Jie,B Yue,W Pengjie.Platform construction of flexray bus and research on its performance[J].Sensors & Transducers,Special Issue,2013,25(12):254-259.
[10] Zhao Haixu,Wei Da,Qu Liangdong.Research for CAN node fault rapid detection based on OSEK network management[C].Applied Mechanics and Materials(Volumes 128-129): 975-978
[11] Li Yanwen,Zhang Hongwei,Gong Jinfeng,Design of automotive CAN network management based on OSEK standard[C].Electronic and Mechanical Engineering and Information Technology(EMEIT),2011 International Conference on(Volume: 2) 717-721.
[12] Baronti F,Petri E,Saponara S,et al.Design and verification of hardware building blocks for high-speed and fault-tolerant in-vehicle networks[J].IEEE Transactions on,Industrial Electronics,2011,3(58): 792-801
[13] 张坤,吴建东,毛承雄,等.基于模糊识别的光伏发电短期预测系统[J] 电工技术学报,2012,27(10):235-240.Zhang Kun,Wu Jiandong,Mao Chengxiong,Optimalcontrol of energy storage system for wind power generation based on fuzzy algorithm[J].Transactions of China Electrotechnical Society.2012,27(10): 235-240.
[14] 薛梅,夏长亮,王慧敏,等.基于 DSP 的开关磁阻电机磁链特性检测与神经网络建模[J].电工技术学报,2011,26(2): 68-73.Xue Mei,Xia Changliang,Wang Huimin.Flux linkage characteristic measurement based on dsp and artificial neural network modeling for switched reluctance motor[J].Transactions of China Electrotechnical Society.2011,26(2): 68-73.
[15] 何怡刚,祝文姬,周炎涛,等 基于粒子群算法的模拟电路故障诊断方法[J].电工技术学报,2010,25(6): 163-171.He Yigang,Zhu Wenji,Zhou Yantao,An analog circuit diagnosis method based on particle swarm optimization algorithm[J] Transactions of China Electrotechnical Society2010,25(6): 163-171.
