机器人避障的最优设计路径
2014-06-21汪慧玲
汪慧玲
(咸宁职业技术学院,湖北 咸宁 437100)
引 言
随着科技的发展,机器人时代到来了。机器人的工作效率的提高与机器人行走时如何避开障碍物,选择最短路径紧密相关。给出如下场景:除了障碍物以外指定一点为机器人要到达的目标点,其中障碍物与目标点的距离至少超过L个单位。同时机器人的行走路径由圆弧和直线段组成,其中机器人转弯时走的是圆弧,因为不能走折线转弯,所以转弯时由直线和与其相切的一段圆弧构成,也可以由多个相切的圆弧相连接组成,但每个圆弧的半径最小为l个单位。机器人在行走时,与障碍物之间的距离至少为l个单位,否则发生碰撞,一旦发生碰撞,机器人就不能完成正常行走。针对这个具体问题,笔者进行了一些探讨。
一、机器人转弯时,沿最小半径的圆的切线走才为最短路径
1.猜想:如图1

图1

用MATLAB数学软件拟合得到图形2

图2

2.机器人避障问题实例分析1:O→A的最短路径求解
如图3(简化图形),以P(80,210)的圆心,l=10个单位为半径做圆,点P是正方形的左上顶点,A(300,300).做圆P的切线OE与圆P相交于点E(x1,y1),做圆P的切线AF与圆P相交于点F(x2,y2)。
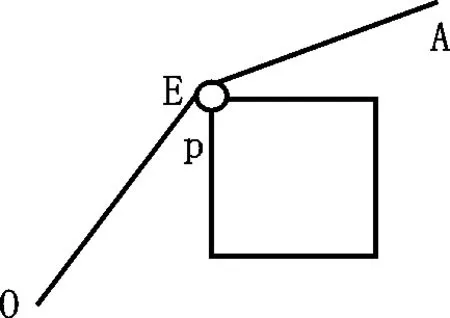
图3
利用简单的几何知识可列出以下等式:
通过MATLAB求解得出
解得直线AF的解析式为y=0.36x+191.76

起点坐标终点坐标路径长度线段一(0,0)(70.51,213.14)224.50弧长一(70.51,213.14)(76.61,219.41)9.05线段二(76.61,219.41)(300,300)237.49
所以总的路径长为224.50+9.05+237.49=471.04。则编号为6的三角形的右下顶点到线段AF的最短距离为22.06可以通过,EF的弧长为9.05,线段OE的长为224.50,线段AF的长为237.49。则点O运动到点A的路径长为471.04。
二、机器人从一点出发经过某一点到达另外一点的最短路径
1.机器人由A点出发经过M点后再到B点,因为机器人不可以走折线,经过M点时候,使M点位于半径为 的动圆的圆周上变动,如图4
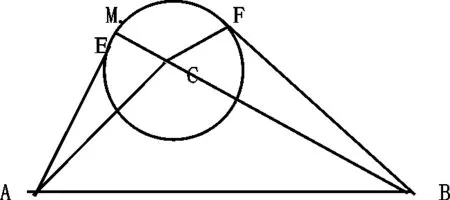
图4

通过建立一个非线性规划模型,可以求出变动圆的圆心c(xc,yc)为:
2.机器人避障问题实例分析2:求O→A→B→C→O的最短路径的求解,
根据以上对从一点出发经过某一点到达另外一点的最短路径的求证,可以作出机器人行走的路径方式,每个经过的中间点都位于以10个单位为半径的圆周上。
类似实例一的计算方法,结合以上非线性规划模型,可以得到每一段直线和相应的圆弧的长度,从而得到机器人行走的最短路径。详细数据列举如下

起点坐标终点坐标路线长度直线一(0,0)(69.96,207.73)224.5圆弧一(69.96,207.73)(69.91,211.87)9.54直线二(69.91,211.87)(76.07,219.75)236.36圆弧二(76.07,219.75)(300.07,300.07)14.34
总的路径长为2828.18,因此O→A→B→C→O的最短路径长为2715.12.
三、结论
本文主要是在直线与圆相切而衔接的结构中,通过MATLAB数学软件作图证明得出机器人转弯时,沿最小半径的圆的切线走才为最短路径。利用解析几何的知识求出各个切点的坐标,结合两点之间的距离公式以及弧长公式分别算出线段和圆弧的长度,从而求得机器人避开障碍物由起点行走到另外一点的最短路径。针对机器人由起点行走经过途中若干个指定点最后到达终点的情况,在动圆半径不变的情况下,为了求的最短路径,建立了非线性规划数学模型求解。都通过MATLAB数学软件计算,给计算带来了快速便捷。试想将机器人在平面场景中行走的问题拓展到空间区域中。
参考文献:
[1]王新成.机器人避障路径的规划模型[J].温州职业技术学院学报,2014,(01):14~15.
[1]姜启源,谢金星,叶俊.数学模型9M].北京:高等教育出版社,2003.
[1]梁弘,翟步祥.高等数学基础[M].北京:北京交通大学出版社,2006.
[1]王沫然.MATLAB与科学计算[M].北京:电子工业出版社,2003.
