基于特征融合的HJ-1-CSAR图像道路特征提取算法
2014-06-20陆萍萍杜康宁禹卫东邓云凯
陆萍萍 杜康宁 禹卫东 王 宇 邓云凯
①(中国科学院电子学研究所 北京 100190)
②(中国科学院大学 北京 100190)
1 引言
道路信息在军事和民用方面都有大量的应用,如地图更新、道路导航、交通状况监测、城市发展监控等。在震后救援中,道路的堵塞和损毁情况也是优先考虑的部分。此外,道路作为图像处理中一个基本特征,准确的道路提取结果为更高层次的研究,如多时相多视角图像配准、城市建筑块的分割等,提供了坚实的基础[1]。随着近年来遥感技术的迅猛发展,从海量遥感数据中进行信息提取已成为一个重要研究方向,而合成孔径雷达(SAR)作为一种主动微波成像传感器,具有全天时全天候的卓越性能,成为一种不可或缺的对地观测工具。环境一号C雷达卫星(以下简称HJ-1-C)是中国首颗民用雷达卫星,也是我国自主研制的第1颗S波段的合成孔径雷达(SAR)卫星,针对HJ-1-C展开的应用研究对于推动我国SAR系统的发展意义重大。
道路特征在低分辨率 SAR图像上通常表现为狭长的暗线条,随着SAR图像空间分辨率的提高,在带来更为丰富的地物细节的同时,也引入了相对于感兴趣目标来说更多的干扰信息。如道路上的车流和行人、两侧的植被等干扰因素会导致道路的散射特性不均匀,在图像上会出现模糊、甚至道路被打断、呈现出不连续状态,因此,道路提取算法的鲁棒性亟待提升。此外,正规道路的建设都有一定的科学依据,遵循一定的标准,不同道路的建设标准也不相同,如主干道为双向多车道,而辅路则可能为单向或单车道,所以在道路提取之前需要弄清楚道路的特征,使得道路提取算法中的参数设计与之相匹配,克服由于参数失配带来的虚假目标。
前人在 SAR图像道路信息提取方面中取得了大量成果[2-7],道路提取方法按照是否需要人工参与可分为半自动和自动道路提取两大类,完全自动识别各类道路还不现实,但自动识别某一种类型道路还是取得了一定的成功,获得了一些有意义的算法。完整的自动道路提取通常包括3个层次:低层次的道路特征提取、中层次的道路基元提取和高层次的道路网络建立,而道路特征的提取在道路提取中的作用至关重要,决定着整个道路提取算法的性能和效率。道路特征点的提取主要分为两大类:边缘检测法和分类法。前者注重对线特征的检测,常用方法包括均值比率(Ratio Of Averages, ROA)及其改进方法、广义似然比(GLR)、加权的均值比率(Ratio Of Exponentially Weighted Averages, ROEWA)在内的一些适用于 SAR图像的恒虚警率的边缘检测算子,多用于中低分辨率的SAR图像道路提取;后者则注重通过幅度信息区分出道路点,常用方法包括FCM聚类[6]、CFAR检测器、神经网络、阈值化处理等,该类方法在光学图像中应用较多,也适用于中高分辨率的SAR图像;此外还有基于小波变换的道路提取方法,如基于Beamlet和基于Ridgelet的道路特征提取方法[7],该类方法运算效率较之前两类方法较低,普适性有待验证。
本文为高效、准确地提取HJ-1-C SAR图像中的道路特征,首先,针对HJ-1-C数据特点,提出了一种包括非线性量化和多尺度自回归滤波相结合的预处理方法;随后,在对经典的线特征提取算法分析比较的基础上,提出了一种综合考虑道路比率信息和方向性信息的道路提取算法。文章结构安排如下:第1部分为引言,对SAR图像中的道路提取进行简要回顾与分析;第2部分为算法细节描述,详细介绍了提出的预处理方法和改进的道路提取方法,并给出了道路提取步骤;第3部分为实验结果及性能分析;最后一部分是总结及进一步研究方向。
2 算法描述
本文从3个方面分析了SAR图像的道路特征提取问题,包括图像预处理、线特征提取和性能评估。由于SAR图像受到相干噪声的影响,通过图像预处理增强了图像的纹理特性同时抑制了相干噪声,这为后面道路提取提供了先决条件。道路提取主要解决的是SAR图像中的道路片段提取,从特征上表现为提取SAR图像中暗带状区域。算法主要步骤如图1所示。
2.1 图像预处理
获得的HJ-1-C SAR图像动态范围窄,大部分区域处在较低灰度级上,整体偏暗,而高亮区域存在部分像素点过饱和现象。针对上述特点,本文首先利用灰度直方图去除少量过饱和点,获得图像的动态范围,然后通过线性或非线性拉伸将图像灰度级扩展到 0-255之间,其中非线性操作可利用Gamma校正,将暗区灰度值向上抬升,鉴于原始SAR图像整体偏暗,Gamma值的设置应小于 1。通过上述操作,可实现HJ-1-C SAR图像的标准可视化效果。
本文采用的滤波方法建立在多尺度自回归模型基础[8]上,首先,对经过非线性量化的图像进行高斯金字塔分解,得到一组不同尺度下的 SAR图像X0, X1,… , Xp,粗尺度上的像素值可通过细尺度上的相应位置临近的像素值求和(或插值)得到;利用式(1)构建 MAR((Multiscale Auto Regressive)模型:

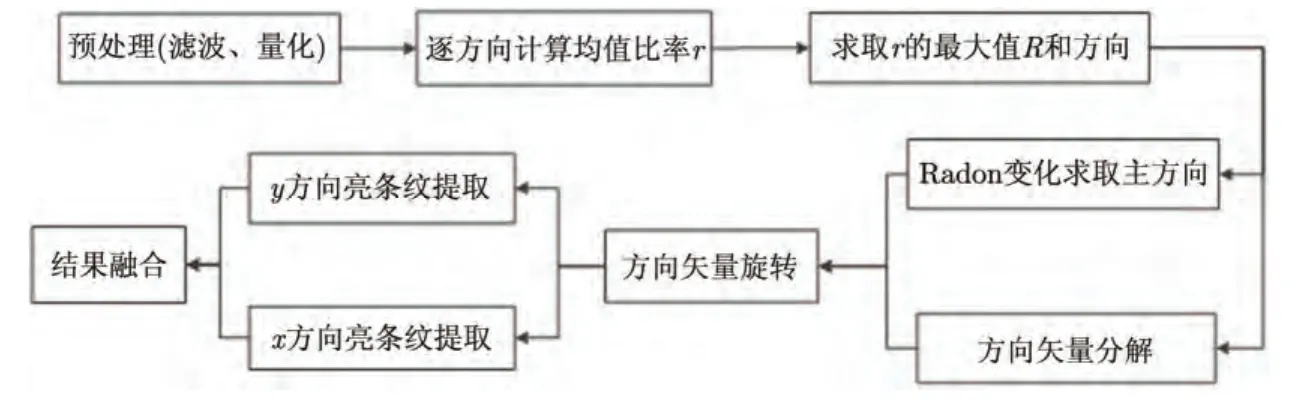
图1 算法流程Fig.1 Workflow of the proposed algorithm
其中,a =[a1a2… ap]为模型的自回归系数,ε为误差项, Xi为Xi−1的父节点,p为模型的阶次。通过最小二乘法估计得模型参数a,从而得到对最细尺度的预测,如式(2)所示。

通过高斯金字塔分解得到的各个尺度上的图像具有较好的平滑性,因此,通过 MAR模型预测得到的最细尺度上的图像同样具有较好的平滑性,同时该模型是建立在层与层像素间相关性的基础上,预测得到的图像细节保持能力更好。
2.2 3窗口ROA算子
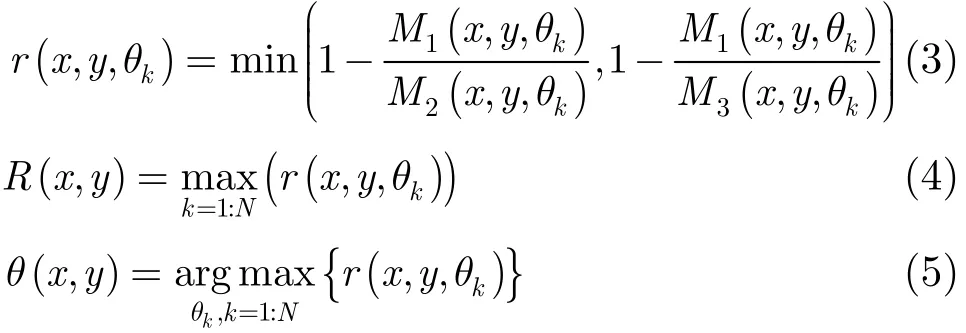
ROA(Ratio Of Average)算子[9-12]可用于阶跃边缘和线边缘的提取,其基本思想假设窗口区域为同质区,将窗口内像素的均值作为该区域的特征值,通过计算相邻窗口比值的最小值,以此表征中心点存在暗条纹的可能性大小。ROA算子的原理图及计算公式见图2和式(3)-式(5)。在图2(a)中M1, M2, M3分别表示3个窗口区域图像的均值,图中所示检测方向为90°,通过角度旋转可以得到不同角度θk的窗口。通过式(3)-式(5),即可求得均值比率R及道路方向θ。图2(b),图2(c)给出了理想情况和加入噪声情况下,ROA算子在中心点的响应函数,从图示可知,ROA算子在高噪声的情况下也具有较好的性能。
2.3 基于方向和比率融合的道路提取算法
应用ROA算子进行道路提取,需要旋转窗口求取多方向的比率,将各个方向比率的最大值作为道路可能性大小的表征。在求解均值比率R的过程中,还得到了另外一个重要的参量道路方向θ。相对于R来说,θ具有一定的道路走向指示能力,非道路区的θ杂乱无章,而道路区的θ则具有一致性和连续性。在某些道路片段,由于道路区的干扰(绿化带、建筑、水体)会导致R较小,而θ则具有一定的鲁棒性,偏差不会太大。因而 θ可以作为R的重要补充,本文正是基于该思想设计基于方向信息和比率融合的道路提取方法,以期提高ROA算子性能。
2.3.1 方向矢量分解 如何有效融合R和θ信息是提高道路提取性能的核心。本文策略为将R看作极化坐标下道路矢量的半径大小,θ看作该矢量的方向,将极坐标(R ,θ)通过式(6)转化为笛卡尔直角坐标(px, py),这样,x方向和y方向的坐标均为R和 θ的函数,这种分解方法优点为:(1)可以将0°和90°相互交叉的直线分离到不同的平面中,使得两个方向上的直线能量更集中;(2)由于其分解结果去除了垂直信息干扰,在进行2次直线提取时,提取的直线连续性优于直接利用R或θ进行直线提取的结果。

2.3.2 道路主方向提取 从局部来看,道路趋向于对齐在两个主方向上[3],通过上述矢量分解,水平和垂直方向的直线被分离到正交的平面中,相互干扰降低。但对于一幅城区SAR图像,道路主方向并非恒定在垂直和水平方向,直接矢量分解对于道路去交叉的效果并不明显。针对该问题,本文通过提取道路主方向,将道路矢量旋转到道路主方向上,最大可能地分离出交叉的道路。当场景较大,道路走向不一致时,可采取分块操作,提取每个图像块内的主方向分别进行主方向对齐和后面的2次道路提取操作。
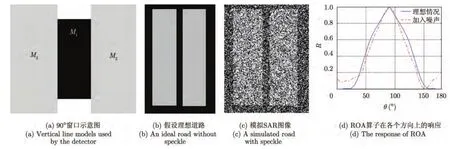
图2 均值比率算子原理示意图Fig.2 A schematic drawing that illustrates the processing step of ROA
提取道路主方向的方法有多种,如方向直方图,Hough[13]变换,Radon[14]变换等。Radon变换具有全局搜索能力强、抗噪性好等优点,因此,本文选用 Radon变换。Radon变换将图像平面(x, y)中的一条直线 ρ=x cosϕ+y sinϕ 映射到参数空间中的一个点(ρ,ϕ),其数学表达式为:

其中,D为整个图像平面,R(x,y)为均值比率图R在(x,y)处的取值,δ为狄拉克函数,ρ为(x,y)平面原点到直线的距离,ϕ为原点到直线的垂线与x轴的夹角。
对于给定的ϕ和ρ值, f(ρ,ϕ)值越大,表示图像中存在满足该参数直线的可能性越大。为求取待分析区域SAR图像的道路主方向,首先,在f平面内求取局部峰值,然后,将ϕ方向对应的所有峰值进行叠加得到(ϕ),其意义为图像在该方向存在直线的可能性指标,最后,求取(ϕ)最大值对应的角度ϕmain作为道路主方向,其数学描述如式(8)所示:

2.3.3 主道路方向对齐 在实现道路主方向提取的基础上,通过道路矢量旋转至主方向从而实现交叉道路的最佳分解,该步骤可通过矩阵旋转操作实现,见式(9)。
2.3.42 次道路提取与融合 经过上述步骤后,可得到两个道路具有明显可分性的指示分量和。分别将和看作两幅图像,在这两幅图像上分别使用ROA算子和互相关算子提取亮条纹 。ROA算子与式(3)-式(4)相似,只是式(3)中分式的分子分母互换。式(10)-式(11)为互相关算子的计算方法。

其中,ξij为i区和j区的互相关值,ni为i区的像素点数,cij=Mi/ Mj为区域均值比,γi为区域方差系数,ξ为区域中心的互相关值。然后对提取的信息进行融合,方法如式(12)所示:

在对融合后的信息进行简单的阈值化及形态学操作,即可得到两个主方向上的道路信息,合并即可得到最终的道路特征提取结果。
2.4 算法评估
对于SAR图像道路特征提取常用的评价指标[15]为:提取率pd、正确率co、提取品质qu及 ROC曲线,其数学描述见式(13)-式(15)。
其中,Ntp表示正确提取到的道路上的像素点数,Nap表示真实道路上的像素点数,Nd表示提取到的像素点数。Nap的计算可以通过手动获取或从Google earth中下载真实的道路网。
3 实验结果及分析
3.1 数据描述及预处理
本文采用HJ-1-C获取的首批SAR图像来进行算法验证,获取时间为2012年12月9日,照射地点为武汉,图像尺寸为 3689×2377,图像灰度值为0到255。原始图像如图3(a)所示。经过非线性量化步骤后的图像如图 3(b)所示,从图中可以看到图像的可视化效果明显提升,道路表现出的线条也比原始图像更加明显,但是由于较暗区域的像素值被整体抬高,图像的相干噪声也随之扩大。图 3(c)给出了经过 MAR滤波步骤后的图像,对比可发现,经过滤波后的 SAR图像平滑性提高、道路区域更明显。为了更好地进行算法的细节展示,文中选取图3(c)中道路丰富的方框内的图像切片进行算法各个步骤的分析,图像尺寸为1149×712,如图3(d)所示,为了便于后续的道路提取效果评估,图 3(e)给出了手动提取的该地区的真实道路。
3.2 道路提取步骤分析
使用ROA算子提取纹理信息,相应的参数设置如下:θ的间隔为5°,滑动窗的宽度和长度从左至右依次为8, 1, 8和51, 31, 51。当窗口宽度设置过大时,会出现细节模糊及对细道路响应不明显;当窗口宽度设置过小时,会出现虚假边缘及道路的多次响应;当窗口长度设置过短时,会导致提取到的道路连续性较差;当窗口长度设置过长时,会导致对短道路的响应不明显。因此设置时需要根据图像中道路宽度和道路长度来设置,提取结果如图4所示。图4(c)对应于图4(a)中红框区域的道路走向,观察可知:(1)对应于道路区域的方向矢量具有较好的一致性;(2)在某些比率值R较小的情况下,其大致方向仍可正确指示道路走向。由此可见,道路方向性指标蕴含丰富的信息量,对于仅利用比率信息进行道路提取,是一个有效的补充参量。
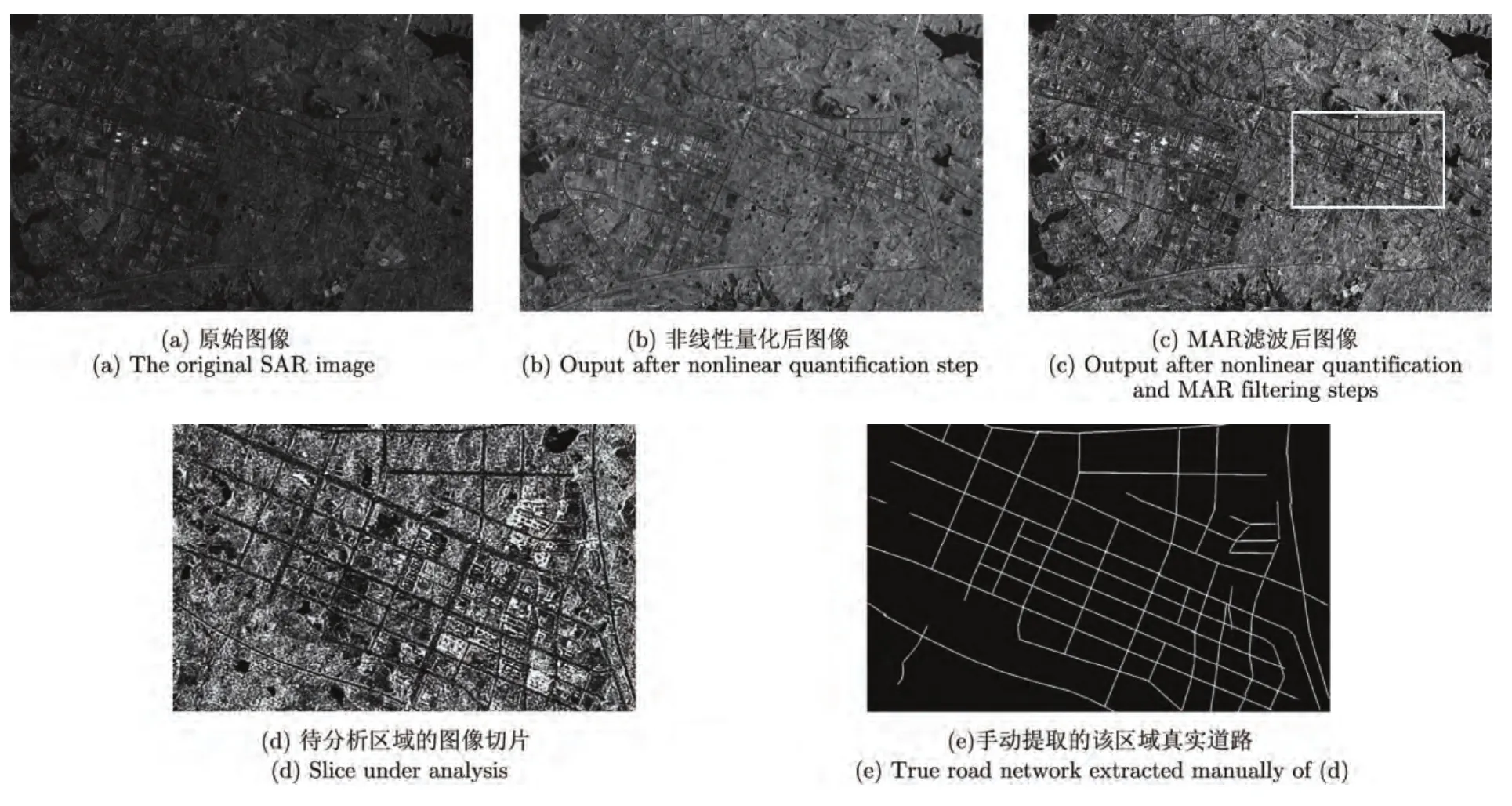
图3 HJ-1-C 卫星武汉地区实验数据Fig.3 Experimental data covering Wuhan areas acquired by HJ-1-C
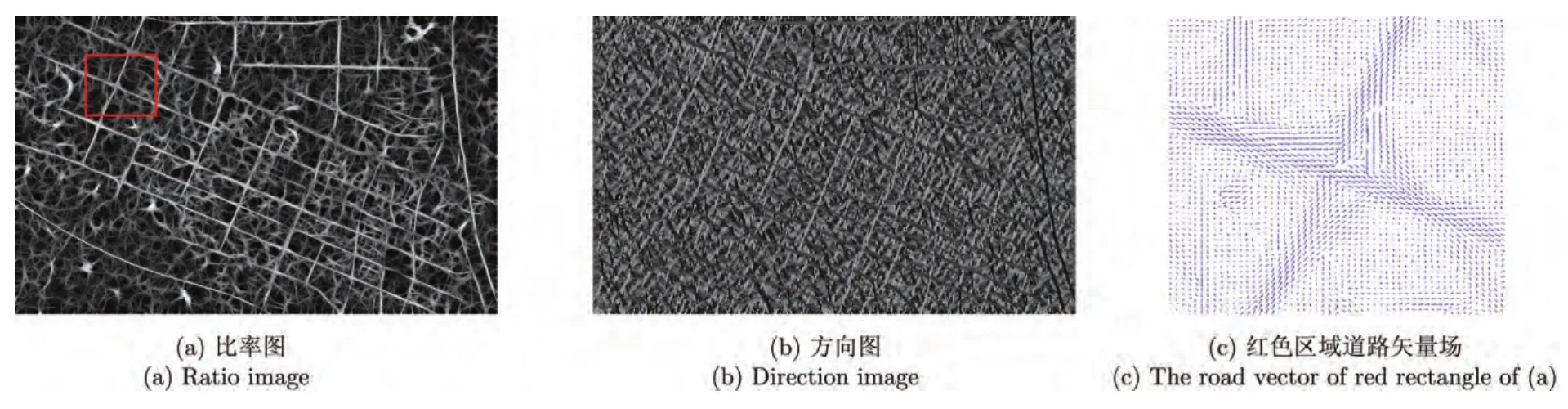
图4 基于ROA的初次提取结果Fig.4 The result of ROA detector
对提取的比率图进行整体Radon变换,结果如图5所示。其中图5(a)为2维参数空间,值越大表明原始图像出现满足该点对应参数的直线可能性越大,白框为检测到的局部峰值,图 5(b)中的曲线为相同角度下峰值的累加值,其最大值出现在67°处,表明切片图像对应的道路主方向与y轴夹角是67°。
道路主方向对齐的实验结果如图 6所示,图6(a),图6 (b)分别是主方向对齐前道路矢量在x和y方向的分解结果,图6(c),图6(d)是对齐后分解结果。通过4个图中的红、蓝、黄3个矩形框的对比,可以分析出,经过主方向对齐后的道路矢量在x和y方向相关性得到了最大程度上的分离,黄色和红色方框所示可验证该方法可有效地分解交叉线,便于2次道路提取与检测,而蓝框区域则表明非主方向道路经过主方向对齐后,能量在两个平面内有所扩散,但从整体来看各类直线数量较少,且从图7(a),图 7(b)可知,扩散的能量对该类道路的检测影响不大。最后通过对图6提取到的两个方向的分解结果分别进行2次道路提取,如图7(a),图7(b)所示,融合的道路提取结果如图7(c)所示。
3.3 道路提取结果定量分析
本文选取提取率、正确率和品质因数3个参量进行性能评估。为了验证预处理步骤对道路提取结果的影响,文中评估了4种情况下的道路提取结果:(1)进行包括非线性量化和自回归滤波步骤在内的道路提取;(2)仅进行自回归滤波的道路提取;(3)仅进行非线性量化的道路提取;(4)不进行任何预处理的道路提取。图8和表1分别给出了直观和定量的比较结果,图 8(a)的提取率和品质因数明显优于其它3种情况,结果表明预处理步骤的有效性。
此外,本文还对比了仅利用比率图或方向图的道路提取结果以及文献[3]中提出的多尺度特征融合算子和文献[7]中提出的利用Beamlet进行道路特征提取的结果,如图9所示,表2给出了定量分析结果。在选择最优参数的情况下,本文方法具有最佳的提取性能,尤其是正确率和品质因数要明显优于其它4种方法。为了测试算法在大场景下的提取效果,将图像分割为256×256的图像块,依次进行道路提取,结果如图10所示,提取率为83.2%,正确率为 80.5%,品质因数为 70.1%,分块的策略不仅可以加速运算效率,而且能弥补大场景下道路走向多变、主道路方向不一致的缺陷,提高算法的适用性。需要说明的是大场景的提取率与前面的小场景下的提取率(91.9%)相比有所下降,原因在于由于SAR的侧视成像几何导致的叠掩、阴影等影响,使得部分地区的道路不可见或出现断续情况,影响了整体的提取率,该现象可通过利用全局信息进行一定弥补,但实现完全提取是不现实的。
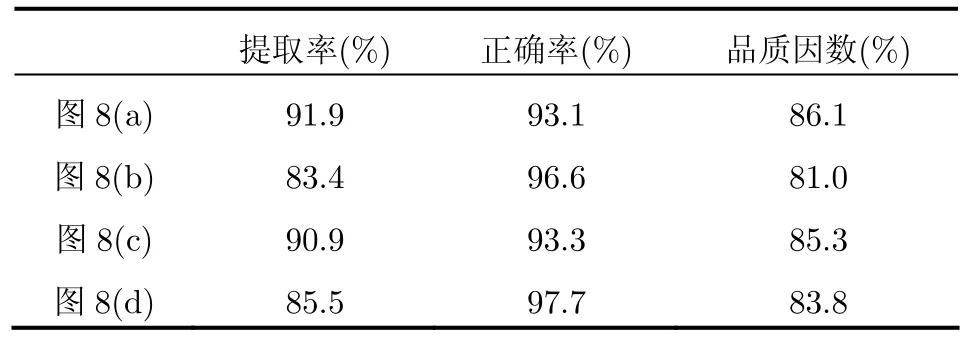
表1 预处理步骤对道路提取结果影响的定量评估Tab.1 Quantitative evaluations of the influence of preprocessing procedure to road feature extraction
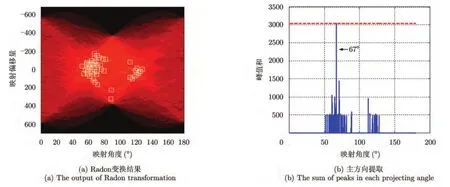
图5 基于Radon变换的主方向提取Fig.5 The main direction extraction based on Radon method
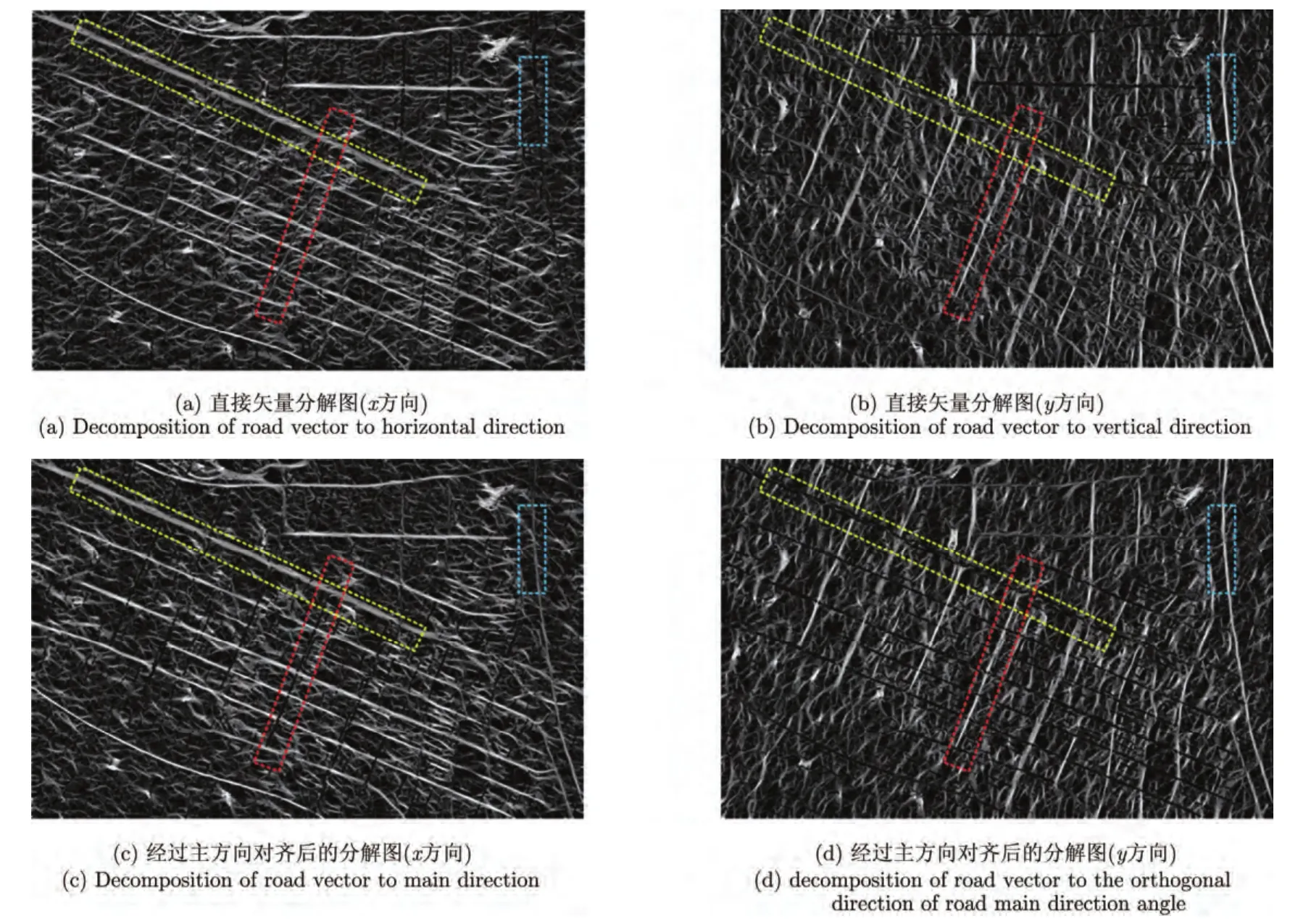
图6 道路矢量分解Fig.6 Decomposition of road vector
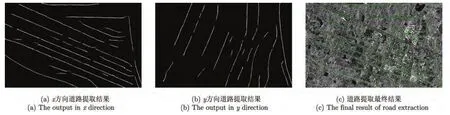
图7 道路特征的2次提取结果Fig.7 The road feature extraction result after operation of fused feature detector
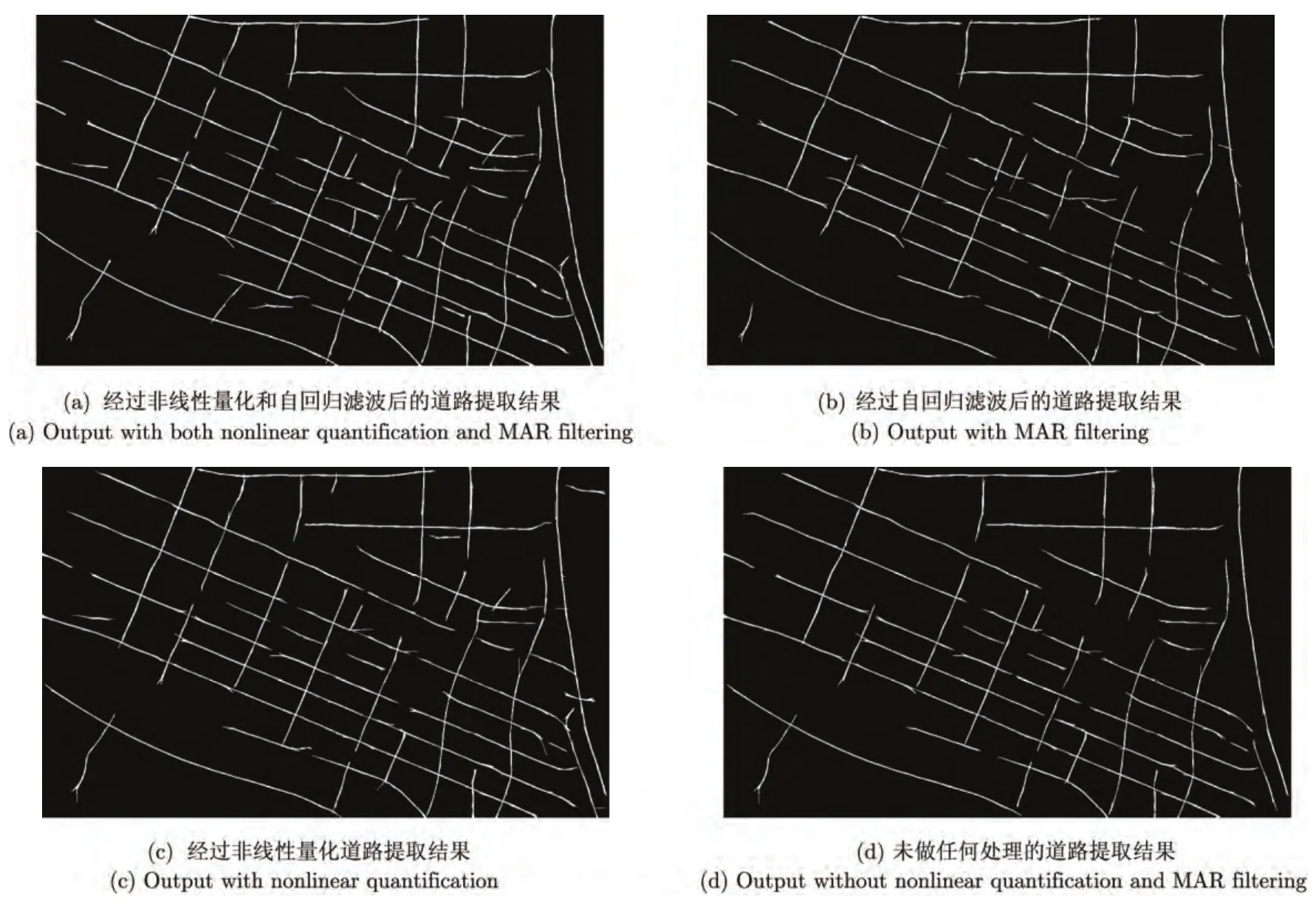
图8 预处理步骤对道路提取结果的影响Fig.8 The influence of the preprocessing procedure to the road extraction result

表2 提取精度对比分析Tab.2 Quantitative evaluation and comparison of the road extraction results

图9 道路提取结果分析比较Fig.9 The comparison with other road extraction methods
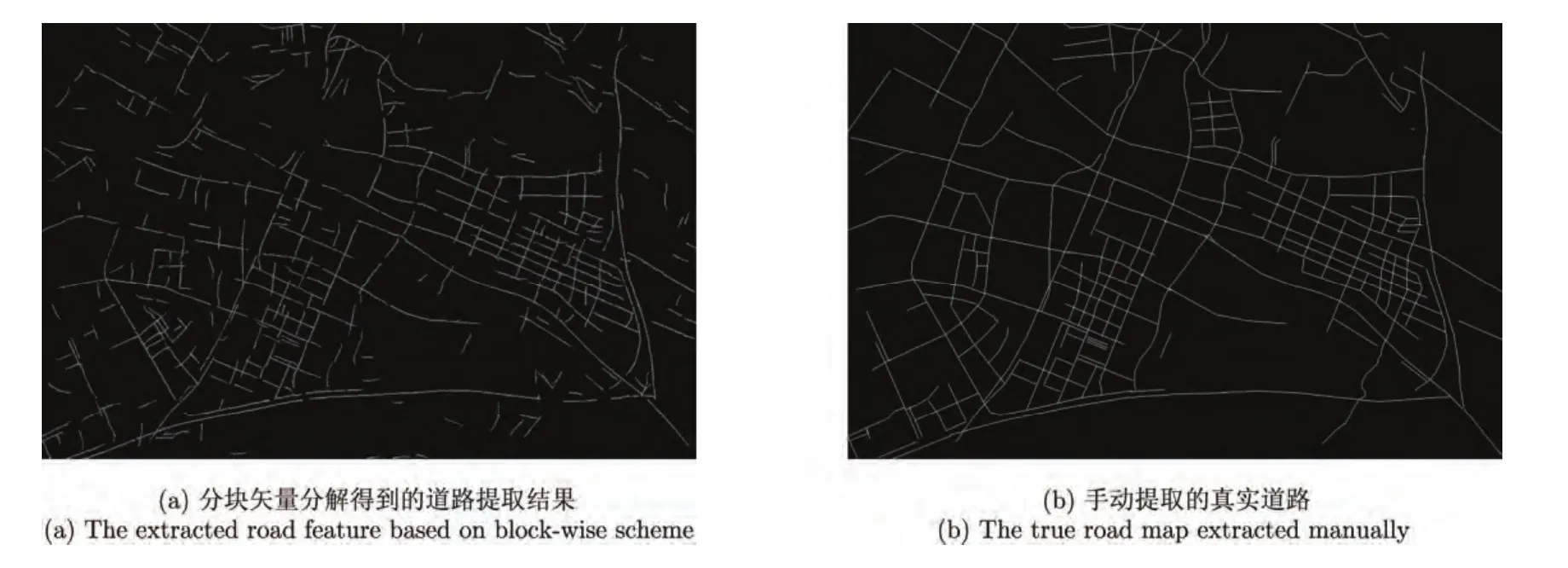
图10 在大场景中得到的道路提取结果Fig.10 The experimental result on the whole SAR image
4 结束语
本文的主要目的是提取HJ-1-C卫星SAR图像城市地区的道路特征。本文在均值比率算子的基础上,提出综合考虑窗口比率信息和道路方向性信息的道路特征提取方法。通过矢量分解和主方向对齐,最大可能性地去除交叉道路的干扰,然后在分离的平面上分别进行2次道路提取。该方法充分利用了比率信息和方向信息的互补性,克服了单一方法在提取交叉道路方面的不足,实验结果表明提出的算法在大场景HJ-1-CSAR图像下具有更高的正确率和品质因数。本文主要完成了道路提取步骤中的道路特征提取,没有考虑道路全局信息对道路片段进行连接,建立完整的道路网络,在后续的研究中将逐步完善。
[1]Schwarz G, Soccorsi M, Chaabouni-Chouayakh H, et al..Automated information extraction from high resolution SAR images TerraSAR-X interpretation application[C].IEEE Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 2009: 677-680.
[2]Dawn S, Saxena V, and Sharma B.Remote sensing image registration techniques: a survey[C].International Conference on Image and Signal Processing, Quebec, Canada, 2010:103-112.
[3]Negri M, Gamba P, Lisini G, et al..Junction-aware extraction and regularization of urban road networks in high-resolution SAR images[J].IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(10): 2962-2971.
[4]Gamba P, Dell’Acqua F, and Lisini G.Improving urban road extraction in high-resolution images exploiting directional filtering, perceptual grouping, and simple topological concepts[J].IEEE Geoscience and Remote Sensing Letters, 2006, 3(3):387-391.
[5]Wessel B and Wiedemann C.Analysis of automatic road extraction results from airborne SAR imagery[J].International Archives of Photogrammetery Remote Sensing and Spatial Information Sciences, 2003, 34(3/W8): 105-112.
[6]Chanussot J, Mauris G, and Lambert P.Fuzzy fusion techniques for linear features detection in multitemporal SAR images[J].IEEE Transactions on Geoscience and Remote Sensing, 1999,37(3): 1292-1305.
[7]Salari E and Zhu Y.A road extraction method using beamlet transform[C].2012 IEEE International Conference on Electro Information Technology (EIT), Indianapolis, USA, 2012: 1-4.
[8]刘爱平, 付琨, 尤红建, 等.基于 MAR-MRF 的 SAR 图像分割方法[J].电子与信息学报, 2009, 31(11): 2556-2562.Liu Ai-ping, Fu Kun, You Hong-jian, et al..SAR image segmentation based on multiscale auto regressive and Markovrandom field models[J].Journal of Electronics & Information Technology, 2009, 31(11): 2556-2562.
[9]Tupin F, Maitre H, Mangin J F, et al..Detection of linear features in SAR images: application to road network extraction[J].IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(2): 434-453.
[10]Oliver C J, Blacknell D, and White R G.Optimum edge detection in SAR[J].IEE Proceedings-Radar, Sonar and Navigation, 1996, 143(1): 31-40.
[11]Ganugapati S S and Moloney C R.A ratio edge detector for speckled images based on maximum strength edge pruning[C].International Conference on Image Processing, Washington,USA, 1995: 165-168.
[12]Sun Hua-dong, Su Fu-lin, and Zhang Ye.Modified ROA algorithm applied to extract linear features in SAR images[C].International Symposium on Systems and Control in Aerospace and Astronautics, Harbin, China, 2006: 1211-1213.
[13]Skingley J and Rye A J.The Hough transform applied to SAR images for thin line detection[J].Pattern Recognition Letters,1987, 6(1): 61-67.
[14]贾承丽.SAR 图像道路和机场提取方法研究[D].[博士论文], 国防科学技术大学, 2006.Jia Cheng-li.The research on extraction of roads and airport from SAR imagery[D].[Ph.D.dissertation], National University of Defense Technology, 2006.
[15]Wiedemann C.External evaluation of road networks[J].International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences, 2003, 34(3/W8): 93-98.