基于RSSI测距的井下人员定位算法改进
2014-06-19张程远董增寿
张程远,董增寿
(太原科技大学电子信息工程学院,太原 030024)
由于煤矿的生产作业大多数是在地下进行,矿井下的地质条件复杂,造成了无线通信质量差,多径效应、多址效应明显、信号衰落快等,给井下的通信带来诸多的困难。一旦事故发生,不能及时准确的确定被困人员位置,对有效营救造成很大的困难。因此有效的定位算法、提高井下定位系统的精确度和稳定性对于安全生产和灾后营救有着重要的意义。
在现阶段井下的人员定位过程中大范围应用的是基于测距技术的人员定位算法,节点之间的距离的测定主要是通过对提取接收信号中的特征参数的处理实现的,通过测量节点间距离后再利用三边定位算法求出可能未知节点位置。
由于矿井下的特殊环境,无线网络的已知节点(信标节点)都分布在矿井下的巷道两侧,巷道可以类似看成一个长方形,当工作人员进入巷道内,通过现阶段比较成熟的RSSI(Received Signal Strength Indication)测距法测量出未知节点(即是移动的矿工)到三个信标节点的距离,进而利用三边定位算法来定位人员位置。这就需要分成各个三角形的定位小区来对未知节点进行定位,但是在各自三角形定位小区中,未知节点容易受到其他节点的信号的干扰。而且由于受到井下环境因素的影响,测出的距离会和实际距离总是有一定的误差,造成三边定位算法失效。本文将对矿井下定位小区间的干扰造成定位混乱进行解决,对三边定位算法由于测距不准确引起的误差进行改进。
1 传统井下人员定位
1.1 RSSI值测距原理
无线信号传播的理论模型有多种,其中主要有自由空间传播模型、对数距离路径损耗模型、对数-常态分布模型等,由于井下封闭的空间环境,所以论文选用对数-常态分布模型如式(1)所示:
(1)
其中,pr(d)为已知节点的接收信号功率(dBm);pr(d0)为参考距离d0点对应的接收信号功率;d为未知节点和已知节点之间的距离(m);d0为参考距离(一般取1 m);XdBm为平均值是0的高斯随机变量(dBm);n为路径损耗指数,一个与环境相关的值。
在实际井下应用中,我们将公式简化,如式(2)所示:
(2)
在一般情况下d0=1 m,由此推出在现实应用中的RSSI测距公式为式(3)所示:
[RSSI]dBm=[pr(d)]dBm=A-10nlgd
(3)
式中,A为信号传输1 m时接收端接收到的信号功率(dBm).通过测量接收信号RSSI强度可推算定位节点到已知节点的距离d,这样就得到了未知节点和某ID信标节点的距离。进一步利用三边定位算法确定定位节点的位置。
1.2 三边定位算法
在理想情况下通过RSSI测距之后,以三个已知节点为圆心,以测得的节点距离为半径画圆,三圆交于一点M,M点即是未知节点的位置。已知三个已知节点的坐标O1(x1,y1),O2(x2,y2),O3(x3,y3),它们到未知节点的距离分别测出来为d1,d2,d3如图1所示。
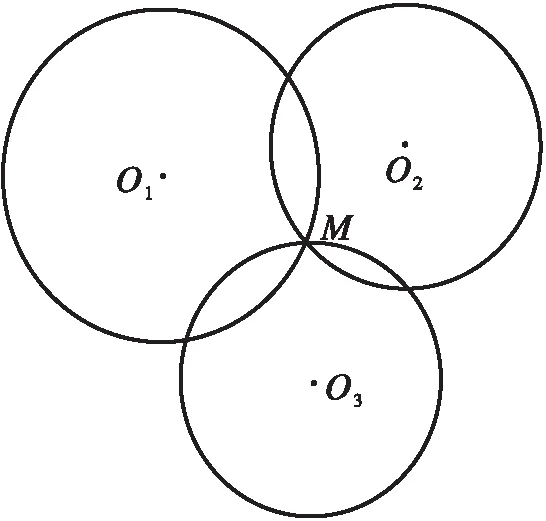
图1 三边定位法示意图Fig.1 The diagram of trilateral positioning
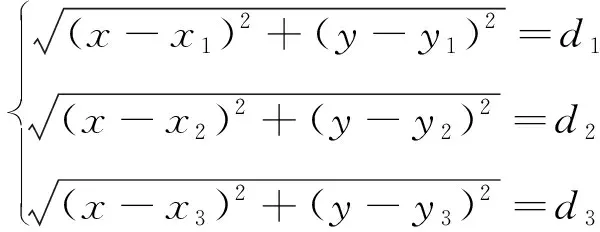
(4)
解出式(4)结果既是未知节点M(x,y)的位置坐标:
(5)
在现实情况中由于测距误差造成的三圆不交于一点情况,再利用质心算法求出未知节点位置。
2 本文算法理论计算
2.1 井下定位小区间干扰信号过滤
现根据矿井下的定位环境,把井下定位区域看做是一个长方形的定位空间,如图2所示,已知节点摆放在巷道的两侧。当移动人员进入定位小区时,接收到已知节点发射的信号,而未知节点通过接收到的信号强度来测量出节点之间的距离,算法会自动过滤掉信号比较弱的其他节点信号。但如果移动人员到达两个定位小区边缘的时候会出现如下两种情况:
(1)如图3,即当移动节点o到达ac的边的时候,移动节点o点和b、d两个已知节点的距离都比较的远,o点都会接收到两个节点b和d的两个RSSI的值,且RSSI的信号强度相当。
(2)如图4,移动节点虽然位于3号小区之内但是距离f节点更近,接收到f节点的RSSI信号值更大,这样就会过滤掉c节点的信号,把定位小区错误的选择在4号小区,造成更大的定位误差。
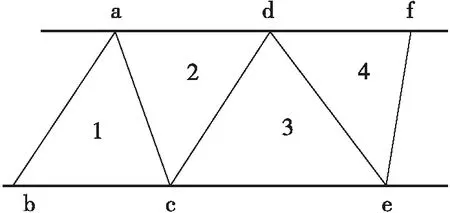
图2 井下节点摆放图Fig.2 The diagram of underground nodes
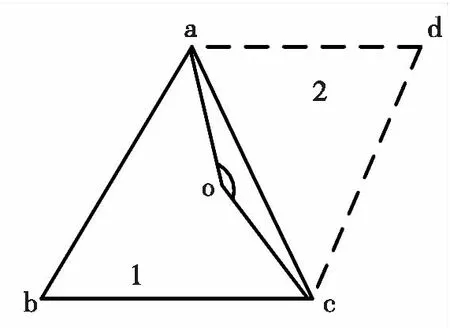
图3 节点间信号干扰 Fig.3 Node signal interference
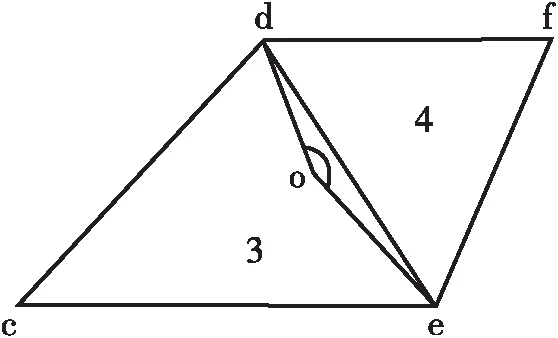
图4 节点间信号干扰Fig.4 Node signal interference
为了避免未知节点进入小区后受到其他信标节点信号的干扰,造成的定位小区混乱。在未知节点进入小区之后加入一个角度信息,为减少储存和计算量,角度信息不用于保存。当未知节点接收到两侧的信号角度在180°之前,即∠aoc<180(∠doe<180)时候,在第一个小区,利用1号小区的三个信标节点a、b、c来进行定位,在∠aoc=180(∠doe=180)之后的下一刻即进入下一个小区,在下一个小区进行坐标定位。利用此角度信息来确定未知节点位于哪个小区,确定定位小区之后,过滤掉其他信标节点的信号干扰,通过RSSI测得节点距离d1,d2,d3之后,再利用本文改进的三边定位算法求出未知节点位置。
2.2 区分小区后三边定位算法优化
在现实情况下,由于矿井特殊环境中测出的距离和现实距离总是存在误差,三圆不可能相交于一点,从而造成方程无解,如图5(a)、(b)所示,三圆不交于一点而是两两相交,由ABC组成的三角形区域D即是未知节点M的可能位置。
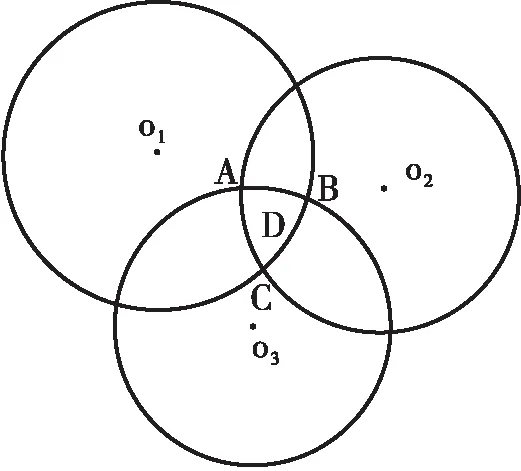

(a)三圆两两相交(b)三圆两两相交图5 三圆无法交于一点Fig.5 Third round not intersection at one point
现利用RSSI进行一次测距,然后在测的距离基础上加上模拟井下环境的范围内随机误差,逐个解出n×3个圆两两相交的三个点做△AnBnCn,计算出由n个三角形相交重叠的部分, 利用网格扫描
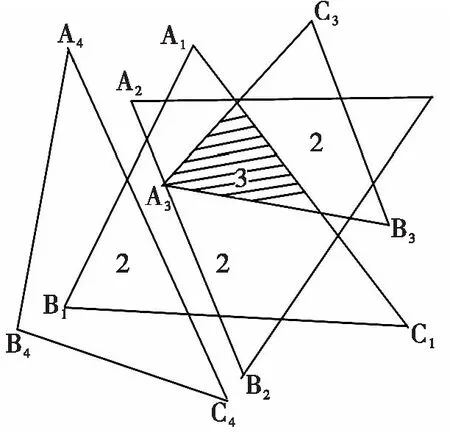
图6 重叠部分标记Fig.6 The mark of overlapping portions
法对重叠部分进行标记,如图6所示,阴影部分的网格点重叠三次是三角形的最高重叠部分,即是缩小范围后的未知节点的可能存在位置。进一步对重叠区域的所有网格点进行质心算法计算,得出重叠部分的质心既是未知节点的位置。
理论中n的值越大计算得到的定位越准确,但是其计算量和功耗也会随之增加。所以本文仿真中进行一次RSSI测距后,然后加上3组随机的误差即取n=4,然后对重叠区域进行标记,最终确定4次测距后标记最多的区域。(xi是重叠区域所有网格点的横坐标,yi是重叠区域所有网格点的纵坐标)对标记最多区域利用质心算法式(6)计算出最终未知节点的位置坐标(xm,ym).
(6)
3 仿真实验和结果分析
(1)在Matlab中设定类似井下巷道的定位环境,巷道两侧选取四个已知节点,组成两个三角形的定位小区。在未知节点进入小区之后收集各个已知节点的RSSI值和信号传输的角度信息,来确定未知节点属于哪个定位小区。
(2)确定定位小区之后,基于RSSI算法的基础上,测量节点间的距离d1,d2,d3.在测得的距离上按照井下环境影响,加上3组范围内误差。搜集四组三边定位时的定位区域,计算出四个定位区域的重叠部分。
(3)利用网格扫描法对4个区域的重叠区的重叠次数标记,找出重叠次数最多的区域。然后采用质心算法,式(6)对此重叠区域的所有网格点进行计算,得出的节点坐标(xm,ym),如图7所示:圆点标出即是准确的人员位置,三角形位置是本算法计算出的人员位置。
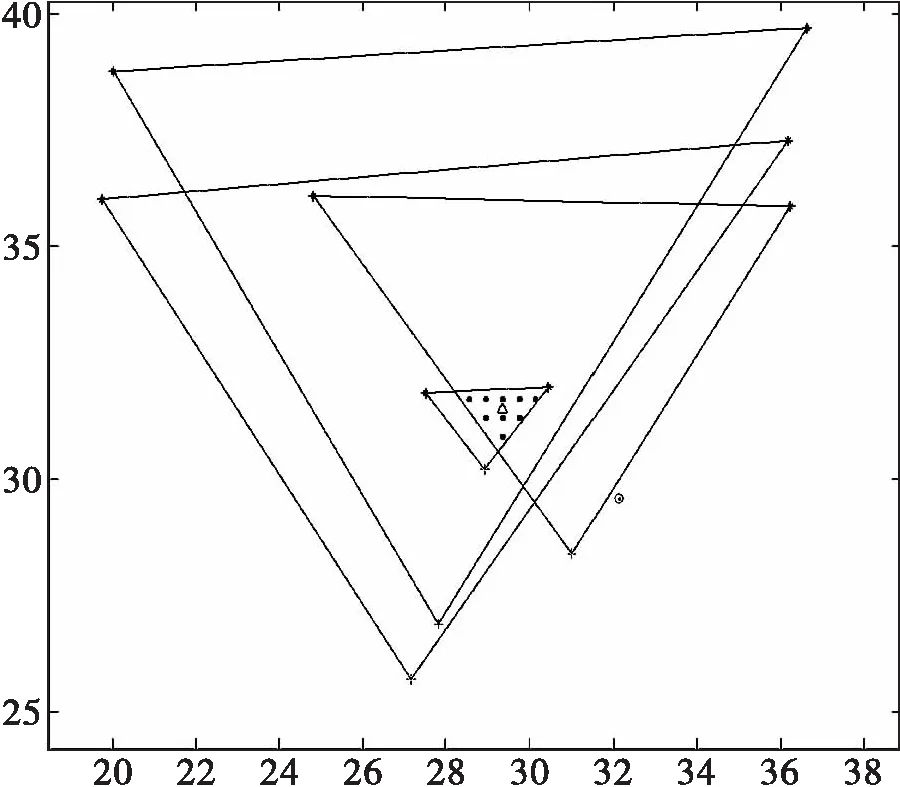
图7 本文算法定位仿真图Fig.7 The diagram of this algorithm positioning
(4)本文以定位小区中心点为圆心,在0到10 m的范围上以0.2 m为递增半径任意取点,从圆心往小区边缘测试,取50个测量点进行定位。
(5)然后利用传统算法在没有区分定位小区情况下,由公式(4)算出两两相交的交点,计算出组成未知节点可能区域的三个点,在单个区域中利用质心算法求得未知节点位置。同样情况下取50个测量点。得出数据如表1所示。
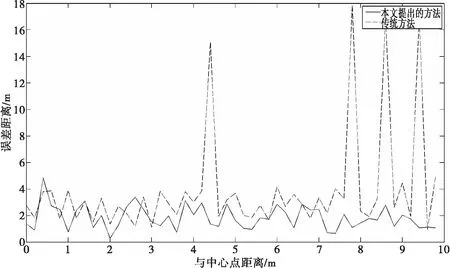
(6)传统算法和改进后算法的比较:计算出传统算法和改进后算法定位出的节点坐标到实际节点的距离,作为误差比较。实验表明改进后的定位算法定位出的未知节点精确度更高,稳定性更好好,尤其是在定位小区边缘的定位稳定性更可靠。测量结果如图8所示。
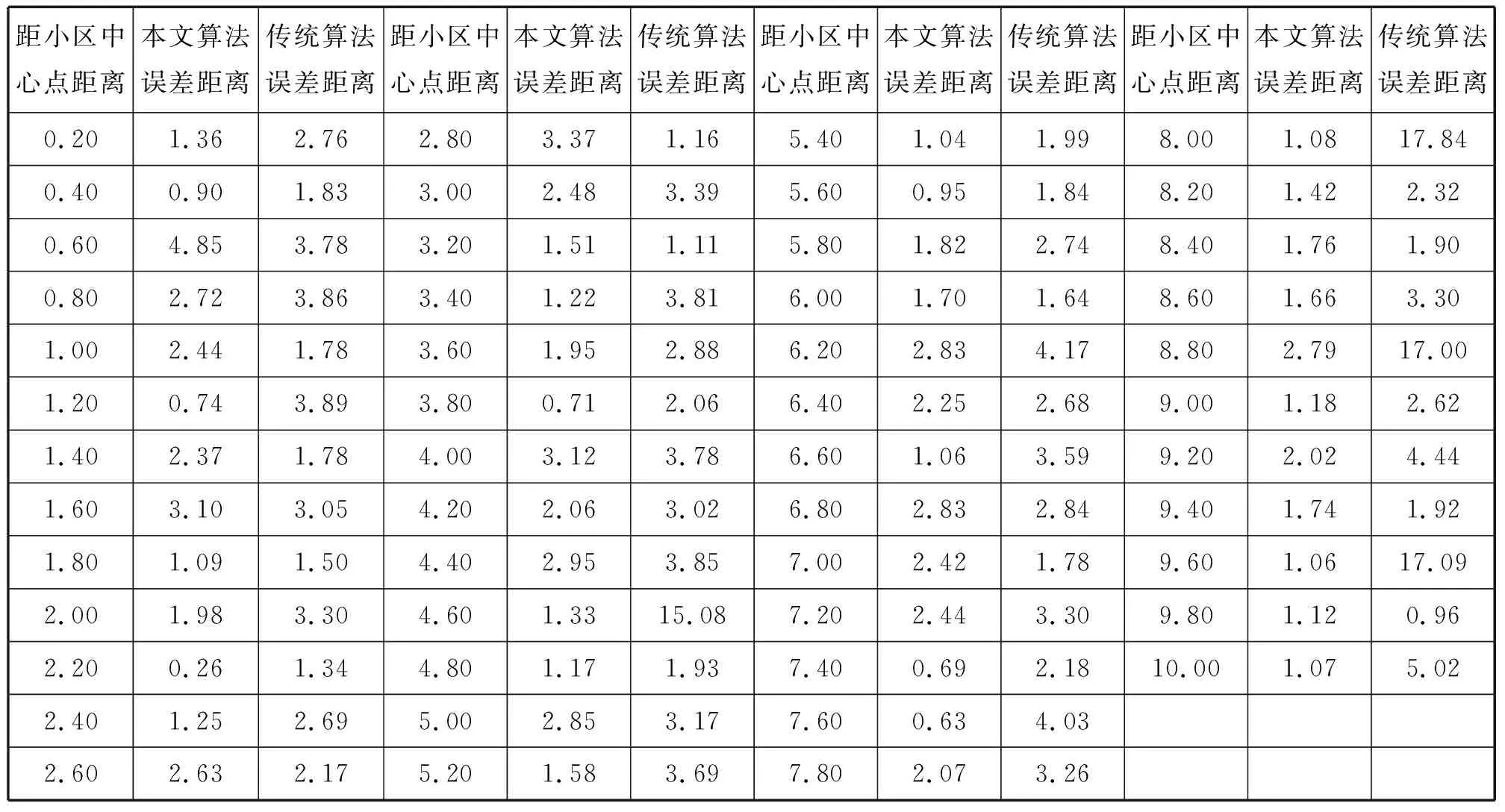
表1 传统算法与本文算法输出值比较(单位:m)Tab.1 The comparison of output values of traditional algorithm and this algorithm
4 结论
根据仿真得出,在相同模拟误差条件下进行人员定位,如表1和图8所示,可以明显看出本论文算法比传统的以RSSI测距的三边定位算法误差更小、稳定性更强,尤其解决了传统定位算法在小区边缘稳定性差的缺点,增加了井下人员定位的可靠性。但是算法中测量角度信息需要额外的硬件设备的支持,这在提高定位准确性和稳定性的同时也增加了测量成本和复杂度。
参考文献:
[1] 周小艳,何为,胡国辉,等.基于ZigBee无线传感器网络的变电站人员定位的改进算法研究[J].电力系统保护与控制,2013(17):56-62.
[2] 杜华.复杂环境下的井下人员定位算法及仿真研究[J].计算机仿真,2012,29(12):171-174.
[3] XIUCAI GUO,YANTAO LI.Underground personnel positioning system based on ZigBee[C]∥Computational Intelligence and Design(ISCID),2011 Fourth International Symposium on.IEEE,Hangzhou,2011(1):298-300.
[4] 周少武,黄博微,曾照福,等.新型的热点簇中心定位算法及其应用[J].通信学报,2012,33(5):124-130.
[5] 刘亚秋,李鹏,景维鹏.基于 RSSI 的井下人员定位技术研究[J].煤炭技术,2013,32(5):96-97.
[6] 郭凤仪,侯方磊,陈忠华.煤矿井下增强型定位分站的研究与实现[J].计算机测量与控制,2012,20(5):1336-1339.
[7] 王琰琳,黄友锐,曲立国.改进型质心算法在井下人员定位中的应用[J].煤矿机械,2012,33(8):76-78.
[8] 孟磊,丁恩杰,冯启言,等.基于 Wi-Fi 与 WebGIS 的井下移动目标定位与历史轨迹提取[J].地理与地理信息科学,2012,28(3):109-110.