双桨双舵舰船旋臂试验粘性流场数值模拟方法研究
2014-06-15王骁蔡烽石爱国应荣熔
王骁,蔡烽,石爱国,应荣熔
双桨双舵舰船旋臂试验粘性流场数值模拟方法研究
王骁,蔡烽,石爱国,应荣熔
(海军大连舰艇学院航海系,辽宁大连116018)
文章基于RANS方程,对计及自由面影响的双桨转动情况下的舰船旋臂试验(RAT)粘性流场数值模拟方法进行了研究。在旋臂试验的数值模拟中,根据旋臂试验的特点,采用分区混合网格,结合MRF方法和滑移网格方法,解决船体圆运动及螺旋桨定轴旋转运动的叠合难题。文中以ITTC推荐的MARIN model no.7967船模为对象,对其在四组转动半径下的旋臂试验进行了数值计算,并将结果与权威水池试验结果进行了对比,吻合良好。文中提出的方法可获得全附体船模旋转流场水动力性能参数,可以较真实地模拟其流场特性,获取包括船—舵—桨干扰在内的流场信息。该文的工作是可行的、有效的,可为深入研究舰船自由旋回试验及非定常操纵运动的数值模拟提供基础。
计算流体力学;MRF方法;滑移网格;旋臂试验
1 引言
随着计算机软硬件技术的飞速发展,舰船操纵性CFD方法,以其建模快、模型改动方便、费用低、针对性强、适用范围广、可消除“尺度效应”、可获取详细的流场信息等优点,受到国际船舶水动力学界的广泛关注,ITTC操纵性技术委员会在第24届大会期间更是将其列为新颖的研讨专题。
操纵性CFD方法是以粘性流理论方法为基础,数值计算方法为手段,模拟自航模或拘束船模水池试验,进而预报舰船操纵性能。纵观国内外研究成果,目前比较常见的是对包括定常斜航运动、纯横荡运动、纯首摇运动等在内的拘束船模试验基本工况数值模拟,其趋势是向运动更为复杂的全附体舰船旋臂运动、大偏航角、大横摇角和自航运动模拟发展。
旋臂试验(RAT)是采用悬臂将船模固定在水池中作圆运动。通过系列地改变旋臂半径、漂角以及舵角,得到旋转、高阶和耦合等水动力导数,进而可运用“分离型”数学模型来预报舰船操纵运动。此外通过旋臂试验还可讨论船/桨/舵间干扰系数与首摇角速度的关系,建立船/桨/舵干扰系数与船形主尺度的关系式,帮助理解船/桨/舵相互干扰的物理本质。
仿真旋臂试验可理解为对螺旋桨定轴旋转及全附体舰船圆周两种运动的数值模拟,也就是需要将非定常RANS求解器结合运动边界处理来仿真舰船的自由推进及绕流流动。其繁复的数学模型、多拓扑混合网格布设及计算资源耗费较大等难题,导致研究进展缓慢,鲜有成果发布。
本文根据旋臂试验的特点,采用分区混合网格,结合多重参考系(MRF)方法与滑移网格方法实现了双桨双舵舰船旋臂试验的数值模拟。为验证本文设计数值模拟求解模式的精度、普适性与可行性,文中进行了MARIN model no.7967船模旋臂试验的数值模拟,并将结果与权威水池试验进行了对比分析。
2 速度滑移
2.1 控制方程
对于不可压缩粘性流流动,在固定坐标系下,其控制方程以张量法表示如下:连续性方程:

其中:ui为流体时均速度分量;p为流体压强;ρ为流体密度;ν为流体的运动粘性系数;ui′为相对于时均流速的湍流脉动速度分量;称为雷诺应力;fi为微元体上的体力。
因本文采用MRF方法(多参考系模型)仿真全附体船模圆周运动(详见2.4小节),需要在旋转坐标系下求解动量方程。在旋转坐标系下,动量公式的左侧用绝对速度可以写成(散度形式):

用相对速度可写成:

旋转坐标系中的连续性方程,可以参照下式写成绝对速度或相对速度的形式:

2.2 RANS方程中fi的定义与赋值
fi是微元体积力,即流体每一体积均承受的力。在舰船进行如直线拖曳等试验时,微元体体力只有重力,且此时Z轴竖直向上,则fx=0,fy=0,fz=-ρg。
2.3 湍流模型
本文采用RNG k-ε湍流模型来封闭RANS方程。RNG(Renormalization Group)k-ε模型,又称重正化群k-ε模型,该模型通过修正湍动粘度,考虑了平均流动中的旋转及旋流流动情况,更加适用于湍流各向异性的高应变率及流线弯曲程度较大的流动,对舰船操纵运动粘性流场数值模拟有着更高的精度和可信度。其输运方程为:

式中各符号物理意义参见文献[1]。
2.4 自由面处理方法
模拟自由面,本文采取VOF方法。VOF方法引进了体积分数的概念,用体积分数表示网格单元内的流体状态。定义第q种流体的体积分数为Cq,则存在以下三种情况:(1)Cq=0,表示网格单元内不含第q种流体;(2)Cq=1,表示网格单元内充满第q种流体;(3)0<Cq<1,表示网格单元内存在自由面。体积分数可通过其控制方程的求解获得,其输运方程为:

式中:u、v、w是流体速度矢量u→在x、y、z方向的分量,t是时间。
VOF方法由于受到数值耗散、非线性效应等的影响,捕捉到的自由面只是一个模糊的轮廓,需在此基础上运用几何重构方法对其进行加工,其基本思路是:在0<Cq<1网格单元中,首先确定自由面法向及相应的Cq值,得到该网格单元中一条近似自由面的割线;然后用所有相邻单元的Cq来精确确定网格单元的法向,进而确定界面的方向。
2.5 MRF方法及滑移网格方法在舰船旋回运动仿真中的应用
本文采用MRF方法仿真全附体船模圆周运动。其基本思想是将运动边界问题转化为边界静止而来流变化的问题,通过参考坐标系的转化,采用固定网格实现。其实现方法是将参考坐标系连接在船模上,这时,从参考坐标系看去,船模是静止的,而计算域内的水流是转动的,即可采用固定网格完成流动计算。旋转坐标系下的控制方程,如2.1小节所列。
仿真船后桨定轴旋转,涉及船体、螺旋桨两物体间的相对运动,无论怎样设置参考系,都会遇到某一固体边界随时间变化,简单地转换参考系不能解决问题,这时就需要考虑采用滑移网格技术。本文建立了包含螺旋桨实体的小区域,通过自定义函数(UDF)控制螺旋桨区域网格与外区域网格相对滑动,进而达到仿真船后螺旋桨定轴旋转的目的。
滑移网格方法的基本原理是将计算域划分为几个区域,区域之间为交界面,交界面两侧的网格可以相互滑动,在滑动的过程中要保证通过交界面的流体通量相等。在数值计算过程中,通量的大小是通过对两个交界面区域的相交部分来计算的,因而要在每个时间步长计算结束后对交界面的相交部分进行确定。交界面区域由面A-B、B-C、D-E以E-F组成。这些区域的交界面产生了面a-d、d-b、b-e、e-f以及f-c。其中,两个单元区域重叠处的面(d-b,b-e,以及e-f)被分组形成一个内部区域,剩下的面(a-d,f-c)形成壁面区域。计算信息是通过面d-b、b-e及e-f从单元I和III代入到单元IV中的(如图1所示)。

图1 交界面区域通量计算Fig.1 Flux-calculation method of interface
2.6 数值计算与边界条件
(1)数值计算:压力—速度耦合方法,采用SIMPLE方法;压力方程、动量、连续方程等均采用二阶差分离散格式;松弛因子,除了动量方程k、ε外,其余因子采用缺省设置;
(2)入口边界条件:设置为压力入口条件。采用明渠流设置方式,可设来流速度。
(3)出口边界条件:设置为压力出口条件。
(4)壁面边界条件:远场边界条件,采用零剪应力壁面边界条件处理;物面条件满足壁面黏附条件,壁面处流体速度与运动边界速度相同。
(5)初始条件:依计算域设置流体体积分数;设置来流速度为全场速度。
3 双桨双舵船模型及计算域建立、网格划分
3.1 几何建模
本文选用ITTC推荐“MARIN model no.7967”船模及“NO.6515”螺旋桨,其主要几何参数如表1和表2所示。

表1 MARIN model no.7967船型数据Tab.1 Principal particulars of MARIN model no.7967

表2 NO.6515桨基本参数Tab.1 Principal particulars of propeller NO.6515
本文首先基于Pro/E软件建立了船体、螺旋桨、舵、减摇鳍、舭龙骨以及桨轴支架等实体几何模型,再在GAMBIT中将这些文件依次导入,利用布尔(BOOL)求和功能将上述几何体合并,得到如图2所示的全附体船模。图3为与实际船模的视觉比对效果。

图2 MARIN model no.7967全附体船模Fig.2 The configuration of MARIN model no.7967

图3 船尾部后视图比对Fig.3 Back sight figure of stern(numerical model and real model)

图4 旋臂试验计算域设置Fig4 Computing domain of RAT

图5 双桨双舵的旋转子区域Fig.5 Computing domain of twin-propellers and twin-rudders
3.2 计算域
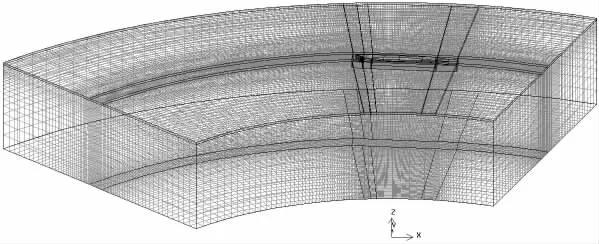
图6 旋臂试验网格划分Fig.6 Grid of computing domain of RAT

图7 船尾区域网格Fig.7 Grid of stern(propeller+rudder)
计算域设置为:以船模稳定旋回后的旋回圈半径为基准,左右舷方向各向外扩充1.5倍船长,计算域底部距自由面为1倍船长,船首距计算域入口为1倍船长,船尾距计算域出口为3倍船长,如图4所示。图5为适应滑移网格技术需要而设置的双桨双舵旋转子区域。
3.3 网格划分
将计算域划分为近流场区域与远流场区域。近流场区域为包含船体的大小为1.2L×0.2L×0.2L的长方体区域,其余部分为远流场区域。整个计算域网格形式采用H-H型。网格划分情况如图6、7所示。
4 数值计算结果及分析
本文分别取Fr=0.280,J=0.8,旋转半径R为13.42 m,20.011 m,22.235 m和22.682 m来计算MARIN model no.7967旋臂试验粘性流场水动力性能。图8及图9为横向力及力矩随旋转速度r′的变化曲线。曲线在原点处的斜率即为无量纲的旋转导数,计算结果见表3。表3中还将旋转半径R=20.011 m时的横向力及力矩计算结果与水池试验结果[2]进行了比对,并将求取的控制导数与ONR求取的结果[3]进行了比较。

表3 圆运动数值计算结果及控制导数求解结果Tab.3 The hydrodynamic coefficients from the RAT and the calculation

表4 MRF旋回试验双桨盘面处平均流速Tab.4 Average hydro-velocity of twin-propellers’plan at RAT

图8 Y′-r曲线(Fr=0.280)Fig.8 Curve of Y′-r(Fr=0.280)

图9 N′-r曲线(Fr=0.280)Fig.9 Curve of N′-r(Fr=0.280)
图10-13为有自由面、双桨转动情况下旋臂试验数值模拟的船体、舵及桨周围的流线分布情况。表4为在双桨旋转情况下的船模旋臂试验时桨盘面处的X、Y方向平均流速。结合图12、图13和表4可知,桨盘面处的流速内桨要低于外桨,对应的进速系数J内桨同样较低,因此双桨舰船旋回时,内桨的负荷要大于外桨。

图10 圆运动船体周围流线图Fig.10 Streamline of flow field of ship hull

图11 圆运动船行波系图Fig.11 Wave pattern of RAT

图12 旋臂试验桨盘面处X方向速度分布Fig.12 Contour of X-velocity of propeller plan

图13 旋臂试验桨盘面处Y方向速度分布Fig.13 Contour of Y-velocity of propeller plan
5 结论
本文运用分区混合网格,结合RNG k-ε湍流模型,采用MRF方法和滑移网格方法进行了双桨双舵船模在计及自由面、双桨转动情况下的旋臂试验粘性流场数值模拟,并将数值计算结果与权威水池试验结果进行了对比,可得到如下结论:
(1)本文方法可真实地模拟舰船旋回流场特性,获取流场信息,辨识旋转、高阶和耦合等水动力导数。
(2)本文方法可以逼真显现舰船旋回试验中船体周围流线分布及自由面船行波。若采用后处理技术,可再现船、舵、桨干扰流场,为揭示船、舵、桨之间相互影响的内在规律提供更加精密而实用的手段。
(3)扩展开来,本文方法还可应用于其它复杂操纵下,非定常运动过程中舰船流体动力的精细研究。
参考文献:
[1]王福军.计算流体动力学分析[M].北京:清华大学出版社,2004.
[2]Agdrup K.SIMMAN model test report_5415-PMM-bare-FORCE-2004[R].FORCE Technology,Denmark,2004.
[3]Simonsen C D.PMM model test with DDG51 including uncertainty assessment[R].Force Technology,ONR,2004.
[4]Senocak I,Iaccarino G.Progress towards RANS simulation of free-surface flow around modern ships[C].Annual Research Briefs 2005.Center for Turbulence Research,Stanford University/NASA Ames,2005:151-1563.
[5]Olivieri A,Pistani F,Avanzini A,Stern F,Penna R.Towing tank experiments of resistance,sinkage and trim,boundary layer,wake,and free surface flow around a naval combatant INSEAN 2340 model[R].IIHR Technical Report No.421,The University of Iowa,2001.
[6]Stern F,Longo J,Penna R,Olivieri A,et al.International collaboration on benchmark CFD validation data for surface combatant[C]//Invited Paper Proc.23rd Symposium on Naval Hydrodynamics.Val de Reuil,France,2000.
[7]李云波.船舶阻力[M].哈尔滨:哈尔滨工程大学出版社,2006.
[8]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2003.
Numerical simulation of the viscous flow over the ship with twin-propellers and twin-rudders in rotating arm tests
WANG Xiao,CAI Feng,SHI Ai-guo,YING Rong-rong
(Dalian Naval Academy,Dalian 116018,China)
A combination of methods was developed to account for the viscous flow over a hull with twinpropellers and twin-rudders in Rotating Arm Tests.Firstly,an Reynolds averaged Navier-Stokes method (RANS)is used to determine hydrodynamic forces on a hull in this unsteady motion.Secondly,volume of fluid method(VOF)is devised for the treatment of free surface.Finally,the Moving Mesh method was applied to simulate the twin-propellers’rotation movement,and the Multiple Reference Frame(MRF)method was used to simulate the hull’s circular motion.Cased studies involving the MARIN model NO.7967 which was recommended by ITTC were run on four different radiuses(from 13.42 m to 22.682 m).These show that the suggested method is efficient and capable,with results that are in good agreement with experimental data.
CFD;Multiple Reference Frame(MRF);sliding mesh;Rotating Arm Tests(RAT)
U661.33+6
A
10.3969/j.issn.1007-7294.2014.07.007
1007-7294(2014)07-0786-08
2013-11-12
辽宁省博士科研启动基金(20111037)
王骁(1980-),男,博士,海军大连舰艇学院讲师,E-mail:wxnv312_6@hotmail.com;蔡烽(1972-),男,博士,海军大连舰艇学院副教授。
