独立驱动电动汽车横摆力矩的模糊控制算法
2014-06-15许建张政李翔尹卫平许忪
许建,张政,李翔,尹卫平,许忪
(西安交通大学机械工程学院电动汽车与系统控制研究所,710049,西安)
电动汽车正成为各国新能源汽车方向着力发展研究的重点[1]。独立驱动电动汽车使用轮毂电机或轮边电机独立驱动各个车轮,能充分利用电机快速响应和高精度转矩控制的优点,通过主动调节各轮转矩可获得横摆转矩,相对传统车的电子稳定程序(ESP)在实现上更加灵活、高效。
直接横摆力矩控制的关键在于,通过判别车辆运行状态计算出一个理想的横摆转矩。Jalali等设计了一个三维的模糊控制器,模糊规则的输入为质心侧偏角β与其参考值βd的偏差Δβ、横摆角速度γ与参考值γd的偏差 Δγ及其微分d(Δγ)/dt[2]。综合考虑了两个主要反映车辆运行状态的控制变量,同时利用微分环节抑制超调的模糊规则规模较大且变量间关系复杂,需要丰富专家经验来制定。为了简化模糊规则,本文分别对两个控制变量进行模糊比例积分(PI)控制,再根据质心侧偏角大小配置两个控制输出的权重计算出理想的横摆转矩,其中权重制定依据SHIBAHATA提出的β理论[3]。
在获取整车的需求转矩后,需要进行转矩分配,目前相关文献大多使用优化方法,建立的目标函数有的侧重稳定性的轮胎附着利用率[4],有的侧重经济性的电机平均工作效率[5]等。文献[6]建立了上述2种目标函数,并利用模糊权重函数制定优化分配策略,但没有考虑各轮输出对横摆力矩控制的贡献程度,各轮输出存在差异性,同时最优控制的计算在实际控制器的实现上也存在实时性的问题。本文在综合优化分配的仿真结果和车辆驱动极限分析的基础上[7],制定了以车辆驱动力矩需求和横摆转矩需求为输入的模糊规则,来分配四轮转矩输出,使得在满足驱动要求的前提下更加有效地获取横摆转矩。
1 直接横摆力矩控制系统(DYC)
1.1 DYC系统结构
四轮独立驱动电动汽车DYC系统如图1所示。在横摆力矩没有介入前,车辆的转矩根据驾驶员踏板输入在前后轴之间进行分配,由叠加DYC系统输出四轮的转矩命令。DYC输出由横摆角速度和质心侧偏角的PI反馈获得,控制变量的期望值反映车辆运行的理想状态,可通过2自由度的参考模型计算得到[8],计算公式如下

由轮胎特性可知,当滑转率过大时驱动力下降,继续增加转矩并不能产生更大的横摆力矩,所以设置滑转率控制器输出作为DYC输出的饱和上限。最终的转矩命令通过CAN总线发送给4个电机控制器,保证车辆在满足驾驶员驱动要求下稳定运行。
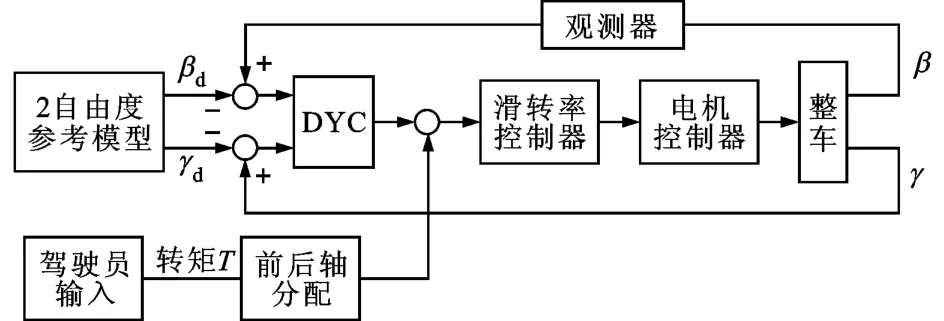
图1 四轮独立驱动电动汽车DYC系统
1.2 整车模型建立
整车模型选用7自由度模型如图2所示[8],模型的动力学方程如下

图2 7自由度整车模型

车辆参数为:前轴到质心距离a=1.233m;后轴到质心距离b=1.327m;L=2.56m;轮距B=1.52m;质心离地高度hg=0.450m;车轮半径R=0.32m;整车质量m=1 316kg;转动惯量Iz=2 046kg·m2;前轮侧偏刚度Kf=50 000kg·m/rad;后轮侧偏刚度Kr=80 000kg·m/rad;单个电机额定功率为10Kw;最大转矩为144Nm。
电机模型采用电机的外特性曲线模拟,表现为低速恒转矩,高速恒功率。Simulink中建立的整车模型如图3所示。

图3 Simulink中整车模型
2 DYC算法分析与设计
DYC算法的框图如图4所示,算法分为两层:第一层选取合适的控制变量,应用自整定参数的PI控制器进行差动转矩的计算;第二层将差动转矩高效、协调地分配到4个驱动电机上。
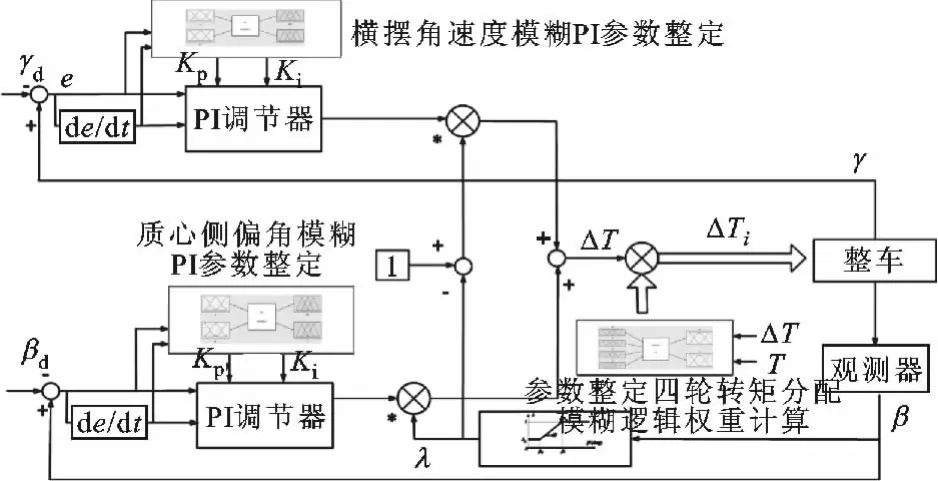
图4 DYC算法框图
2.1 差动转矩的计算
本文分别设计两个模糊控制器,自适应地整定横摆角速度角β和质心侧偏角γ的PI控制器的参数,在联合控制时调整两个控制器的输出权重λ。权重取值的规律如图5所示,权重的设置依据β理论:普通的驾驶员通常在β小于2°时是可以正常驾驶的,此时主要控制目标是γ,车辆极限工况下(非线性区)β大于10°已严重失稳,此时主要控制β。联合控制时输出如下

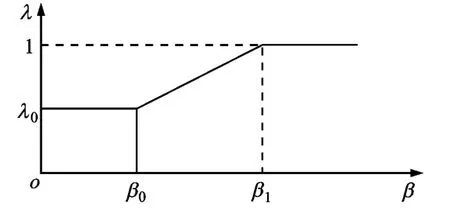
图5 权重取值
输入输出模糊集为{NB,NM,NS,ZO,PS,PM,PB};横摆角速度误差e和误差变化ec基本论域为[-0.12,0.12]和[-1,1];质心侧偏角误差e和其误差变化ec的基本论域分别为[-6°,6°]和[-1,1];Kp论域为[0,500];Ki论域为[0,100];模糊规则为“if…then…”条件语句。表1是模糊控制器的模糊规则表[10],输出分别为Kp、Ki。

表1 PI模糊控制器的模糊规则
2.2 四轮转矩分配原则
四轮横摆力矩

由式(13)可得:以左转驱动工况为例,即Fxi>0、Fyi<0,有Mz2>0、Mz3<0,而Mz1和Mz4方向不确定。如果想要施加正方向横摆力矩,增加外前轮或减小内后轮的驱动力矩则使得效果明确,而控制内前轮和外后轮时产生的横摆力矩方向与施加的力矩大小相关。简言之,外前轮和内后轮对横摆力矩输出的贡献要大于其他两轮,各轮对横摆力矩的输出具有非线性性质。
在驱动工况下存在载荷转移,内侧车轮载荷小于外侧,前轴车轮载荷小于后轴,根据摩擦圆理论,载荷较小的会先达到附着极限,因此在驱动工况下增加后轮的转矩能更多地利用富余的附着力,后轴的分配比例可以相对大一些。
设达到附着极限时驱动转矩为Tlim,电机最大输出转矩为Tmax,前轴分配的转矩为Tf,后轴为Tr。未达到附着极限时,为不改变整车的驱动力,可设置一侧增加的转矩等于另一侧减小的转矩,前轴的驱动力矩为前轴输出的Tf,最大的差动转矩为-2Tmax+Tf;达到附着极限后,单侧减小的力矩会大于另一侧增加的力矩,前轴输出最大的差动转矩为-Tmax-Tlim,此时前轴的驱动力矩为Tlim-Tmax。后轴情况同理。
综合分析以上三种约束,通过设置各轮转矩分配系数的模糊规则将上述经验总结在一起,其基本原则可归纳为:(1)T、ΔT较小时,内外侧车轮可施加大小相等、方向相反的差动力矩,为了减少控制器的负担,可将前轮的权重设置为较小值,随着ΔT的增大,前轮的权重相应增大;(2)T中等、ΔT较大、单轮驱动力矩增加到上限时,为了获取更大的差动力矩,单侧车轮降低的力矩值会大于另一侧增加的转矩值,并且外前轮和内后轮的权重更大;(3)T、ΔT较大时,为了保证整车的转向稳定性,内外侧同时降低整车的驱动转矩,一侧降低的转矩值大于另一侧来保证需求的ΔT。四轮转矩分配系数的模糊规则如表2所示,输入为实际横摆转矩和驱动转矩需求,输出为四轮的转矩分配,系数si与ΔTi的关系如下


表2 四轮转矩分配系数的模糊规则
3 硬件在环仿真(HIL)
3.1 仿真结构
V模式已成为当今汽车电子控制系统的主流开发过程,HIL确保了ECU开发验证的正确性和有效性,同时定下实车参数标定的基调,减少后期工作量和成本,并且能够模拟实际中受气候等因素影响的难以复现的工况或者极限工况[11]。本文的硬件在环仿真系统框图和系统的实物如图6所示,仿真机和控制器通过CAN总线通信传输信号。
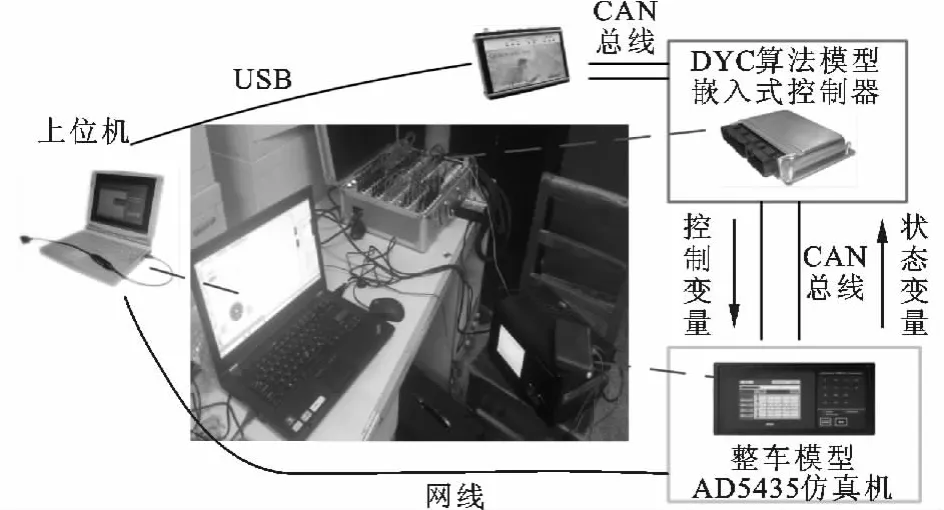
图6 硬件在环仿真图
实际控制器选用ControlBase产品级控制器,集成了完整的驱动模块库,并支持自动代码生成和CCP标定。实际控制器接收状态信号后,进行DYC算法运算,输出四个车轮电机的控制转矩,同时可以应用CANape工具在线标定控制器参数,算法模型如图7所示。
仿真机选用日本A&D公司的AD5435仿真机产品,它支持Simulink编程和自动代码下载。在1.2节整车模型添加通信和工况模拟模块如图8所示,下载到仿真机中可代替实际车辆,同时设计上位机界面进行工况控制和信号监测。
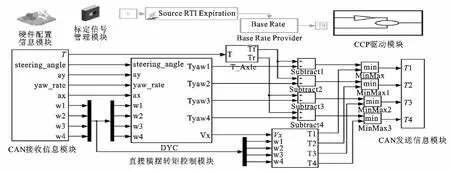
图7 实际控制器上的模型

图8 AD5435仿真机上的添加的模块
3.2 仿真结果
选择正弦转向单移线试验可以验证控制系统对车辆操作稳定性的作用效果,正弦转向起始时刻为0.5s,一个周期后即2.5s时刻回复到直线。
车辆在正弦转向工况下的理想轨迹是回到直道,为了对比控制系统对不同工况的适应性,选择路面附着系数为0.9、车辆初速为60km/h时为普通工况,路面附着系数为0.3、车辆初速为90km/h时为危险工况,如图9~图16所示。施加控制时控制器能很好地跟踪理想轨迹,尤其在路面附着系数较低、车速较高的车辆完全失去稳态,联合控制能进一步减小跟踪误差。
从图11、图12、图14和图15车辆的横摆角速度和质心侧偏角也可以看到,施加控制情况下,两个变量能更好地跟随参考值。在危险工况下质心侧偏角值较大,若不施加控制,则横摆角速度值最终无法收敛到0。
两种工况下4个车轮的输出,转矩先在前后轴之间分配,在普通工况下左右轮相对前后轴输出转矩对称,而在危险工况下单侧车轮减小的转矩值会大于另一侧以减小车速,使车辆更快地恢复稳态。以上仿真结果表明:所设计的模糊控制器能够很好地保持车辆在正弦转向操纵下的横摆稳定性,同时对工况具有适应性。

图9 普通工况下轨迹对比

图10 普通工况下横摆角速度对比
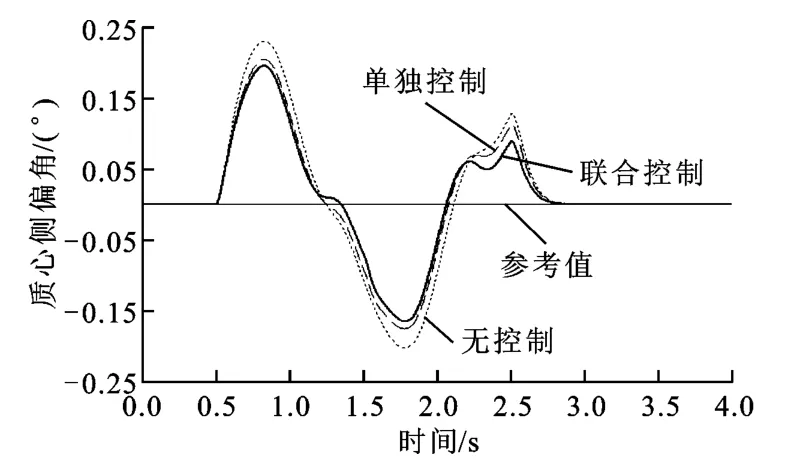
图11 普通工况下质心侧偏角对比

图12 普通工况联合控制下转矩输出

图13 危险工况下轨迹对比
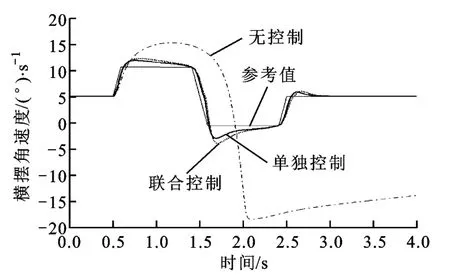
图14 危险工况下横摆角速度对比

图15 危险工况下质心侧偏角对比

图16 危险工况联合控制下转矩输出
4 结 论
(1)本文选用Dugoff轮胎模型,建立了四轮独立驱动电动汽车的7自由度整车模型,并成功下载到AD5435仿真机中用以替代实际车辆。同时,应用自动代码生成工具将设计的DYC算法下载到嵌入式控制器中进行硬件在环仿真,在不同工况下进行正弦转向试验,验证了DYC算法的有效性和对不同工况的适用性。
(2)为了获取期望的横摆转矩值,设计了基于横摆角速度偏差和质心侧偏角偏差的模糊PI控制器,同时综合分析各轮对横摆力矩的贡献和驱动极限下转矩分配。硬件在环实验结果表明:在控制器作用下,车辆能更好地跟踪驾驶员理想轨迹,尤其在高速低、附着系数路面工况下很好地抑制了质心侧偏角的增加。联合控制下的车辆性能要优于单独控制下的性能,算法具有可行性和高效性。
[1]曹秉刚,张传伟,白志峰,等.电动汽车技术进展和发展趋势 [J].西安交通大学学报,2004,38(1):1-5.CAO Binggang,ZHANG Chuanwei,BAI Zhifeng,et al.Technology progress and trends of electric vehicles[J].Journal of Xi’an Jiaotong University,2004,38(1):1-5.
[2]JALALI K,UCHIDA T.Integrated stability control system for electric vehicles with in-wheel motors using soft computing techniques [J].SAE International Journal of Passenger Cars:Electronic and Electrical Systems,2009,2(1):109-119.
[3]SHIBAHATA Y,SHIMADA K,TOMARI T.Improvement of vehicle maneuverability by direct yaw moment control[J].Vehicle System Dynamics,1993,22(1):465-481.
[4]MOKHIAMAR O,ABE M.How the four wheels should share forces in an optimum cooperative chassis control[J].Control Engineering Practice,2006,14(3):295-304.
[5]余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制 [J].同济大学学报,2008,36(8):1115-1119.YU Zhuoping,JIANG Wei,ZHANG Lijun.Torque distribution control for four wheel in-wheel motor electric vehicle[J].Journal of Tongji University,2008,36(8):1115-1119.
[6]续丹,王国栋,冯晓辉,等.独立驱动电动汽车的转矩优化分配策略研究 [J].西安交通大学学报,2012,46(3):42-46.XU Dan,WANG Guodong,FENG Xiaohui,et al.Study on optimizing torque distribution strategy for independent 4WD electric vehicle[J].Journal of Xi’an Jiaotong University,2012,46(3):42-46.
[7]HE Peng,HORI Y.Optimum traction force distribution for stability improvement of 4WD EV in critical driving condition[C]∥9th IEEE International Workshop on Advanced Motion Control.Piscataway,NJ,USA:IEEE,2006:596-601.
[8]KIECCKE U,NIELSEN L.Automotive control systems[M].Washington,DC,USA:SAE,2000:322.
[9]RAJESH R.Vehicle dynamics and control[M].Berlin,Germany:Springer,2005:225-230.
[10]刘金琨.先进PID控制 MATLAB仿真 [M].北京:电子工业出版社,2011:115-128.
[11]魏学哲,戴海峰,孙泽昌.汽车嵌入式系统开发方法、体系架构和流程 [J].同济大学学报,2012,40(7):1064-1070.WEI Xuezhe,DAI Haifeng,SUN Zechang.Methodology,architecture and development flow of automotive embedded systems[J].Journal of Tongji University,2012,40(7):1064-1070.
[本刊相关文献链接]
续丹,王国栋,曹秉刚,等.独立驱动电动汽车的转矩优化分配策略研究.2012,46(3):42-46.[doi:10.7652/xjtuxb201203 008]
邓飙,苏文斌,郭秦阳,等.双缸电液位置伺服同步控制系统的智能控制.2011,45(11):85-90.[doi:10.7652/xjtuxb2011 11016]
李大海,李天石.非均匀采样系统的支持向量回归建模与控制.2011,45(3):65-69.[doi:10.7652/xjtuxb201103012]
龙波,曹秉刚,胡庆滑,等.电动汽车用感应电机弱磁区电磁转矩最大化控制.2009,43(4):62-65.[doi:10.7652/xjtuxb 200904015]
叶敏,郭振宇,程博,等.基于参数摄动的电动汽车再生制动鲁棒混合控制研究.2007,41(1):64-68.[doi:10.7652/xjtuxb 200701015]
曹秉刚.中国电动汽车技术新进展.西安交通大学学报,2007,41(1):114-118.[doi:10.7652/xjtuxb200701026]
方炜,姜长生.一类基于模糊系统的非线性鲁棒自适应预测控制.2008,42(6):669-673.[doi:10.7652/xjtuxb200806005]
吕晓军,郑南宁.车辆单神经元模型参考自适应控制算法研究.2007,41(12):1391-1395.[doi:10.7652/xjtuxb200712 002]
曹军义,曹秉刚.分数阶控制器离散方法的评估策略研究.西安交通大学学报,2007,41(7):842-846.[doi:10.7652/xjtuxb 200707020]
王军平,陈全世,曹秉刚,等.电动车用镍氢电池模块的充放电模型研究.2006,40(1):50-52.[doi:10.7652/xjtuxb200601 012]
王晨旭,秦涛,管晓宏,等.有向网络兴趣社区的快速挖掘算法及其在僵尸粉检测中的应用.2014,48(6):7-12.[doi:10.7652/xjtuxb201406002]
杨博,刘亦夫,尉星,等.双燃料发动机电控单元的设计与控制策略.2014,48(5):8-14.[doi:10.7652/xjtuxb2014 05002]
毛阳,陈志勇,史文库,等.磁流变液双质量飞轮扭振减振特性研究.2014,48(6):127-133.[doi:10.7652/xjtuxb201406 022]
吴仁斌,姚敏立,贾维敏,等.采用幅度响应约束的鲁棒自适应波束形成算法.2014,48(4):109-114.[doi:10.7652/xjtuxb 201404019]
史椸,耿晨,齐勇.一种具有容错机制的MapReduce模型研究与实现.2014,48(2):1-7.[doi:10.7652/xjtuxb201402001]
史文库,毛阳,姜雪,等.发动机半主动液压悬置的动态特性及参数影响分析.2014,48(1):42-47.[doi:10.7652/xjtuxb 201401008]
宋渤,徐龙起,张桂铭,等.采用微传感器的黏/密度实验系统及其 性 能 测 试.2014,48(3):44-48.[doi:10.7652/xjtuxb 201403009]
陈梁远,李黎川.往复式开关磁阻直线电机的效率最大化控制.2012,46(10):15-19.[doi:10.7652/xjtuxb201210003]