基于CAN现场总线仿人机器人机械臂分布式控制的研究与设计①
2014-06-14白金泉姜重然
李 丽, 郝 兵, 白金泉, 姜重然
(佳木斯大学信息电子技术学院,黑龙江佳木斯 154007)
0 引言
CAN是控制网络的英文(Control Area Network)的简称,由德国BOSCH公司最早提出,它具有通信速率高(最高可达1Mbps/40m),传输距离远(10km),抗干扰能力强,接口简单,编程方便,开发系统价格便宜等优点;在现代工控领域中得到了广泛的应用.仿人机器人具有双臂、颈部、腰部、双腿等很多的自由度,为了能够完成复杂的动作,各部分必须通过关节的协调控制[1].如果控制系统过于集中,其中的局部出现错误,就可能降低系统的性能,严重会产生全系统失控的严重故障.所以基于CAN现场总线的分布式控制,问题就会迎刃而解[2].如图1 所示.
机械臂的运动规划算法由主控制器的计算机完成,通过现场总线与各部位的控制单元通信,协调各关节部位的动作;由执行器来执行规定动作[4].每个部位的关节执行器由一台电机、驱动器、检测反馈装置构成,负责执行各个部位关节的动作[5].臂分布式控制器.肩部的回转和仰俯以及肘部的仰俯动作采用RE3024V 60W的电机,腕部的偏转和回转以及仰俯采用RE2524V 20W的电机.采用TITECH的JW-144-2作为电机的驱动器[6].
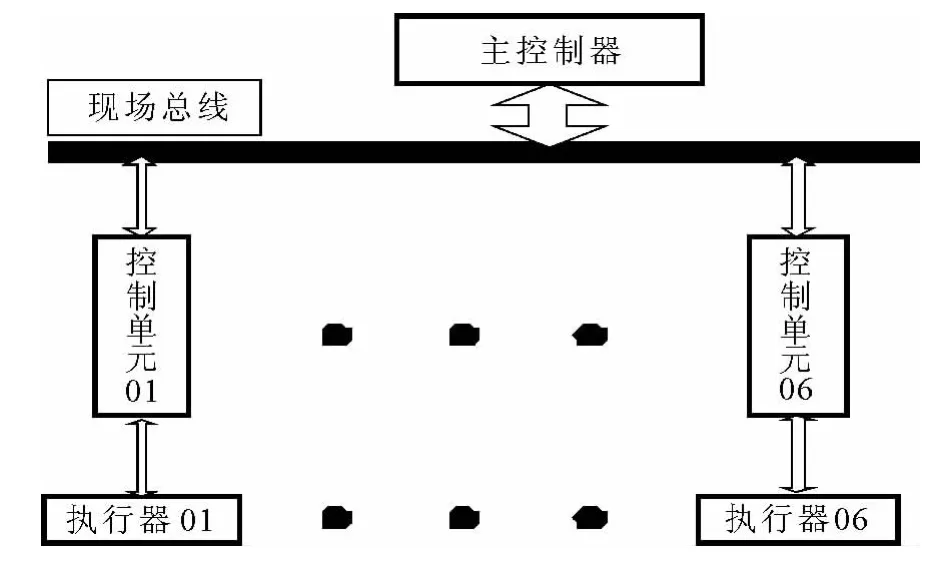
图1 分布式控制系统结构框图
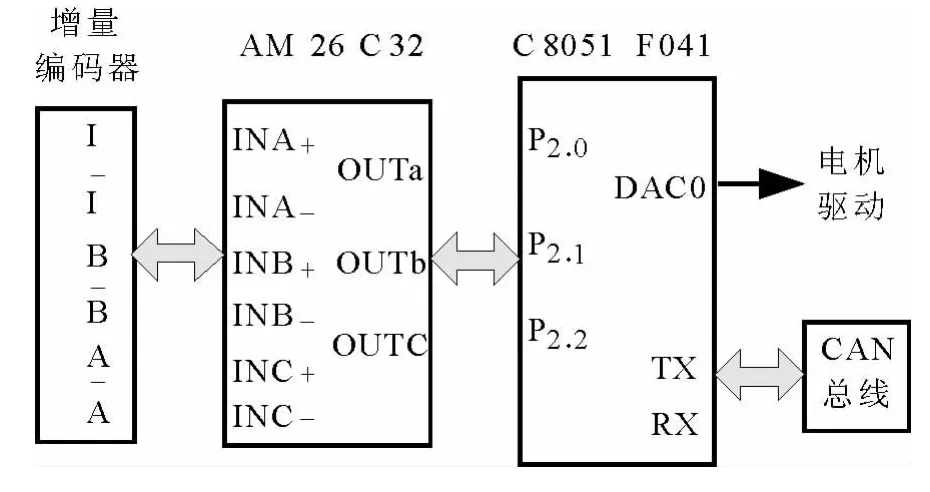
图2 分布式控制器的硬件结构框图
1 仿人机器人分布式控制器的硬件设计
根据仿人机器人需要体积小的实际情况,把关节控制器、电机驱动器的接口电路、增量式编码器信号处理电路等设计在一个电路板上,也就是机械
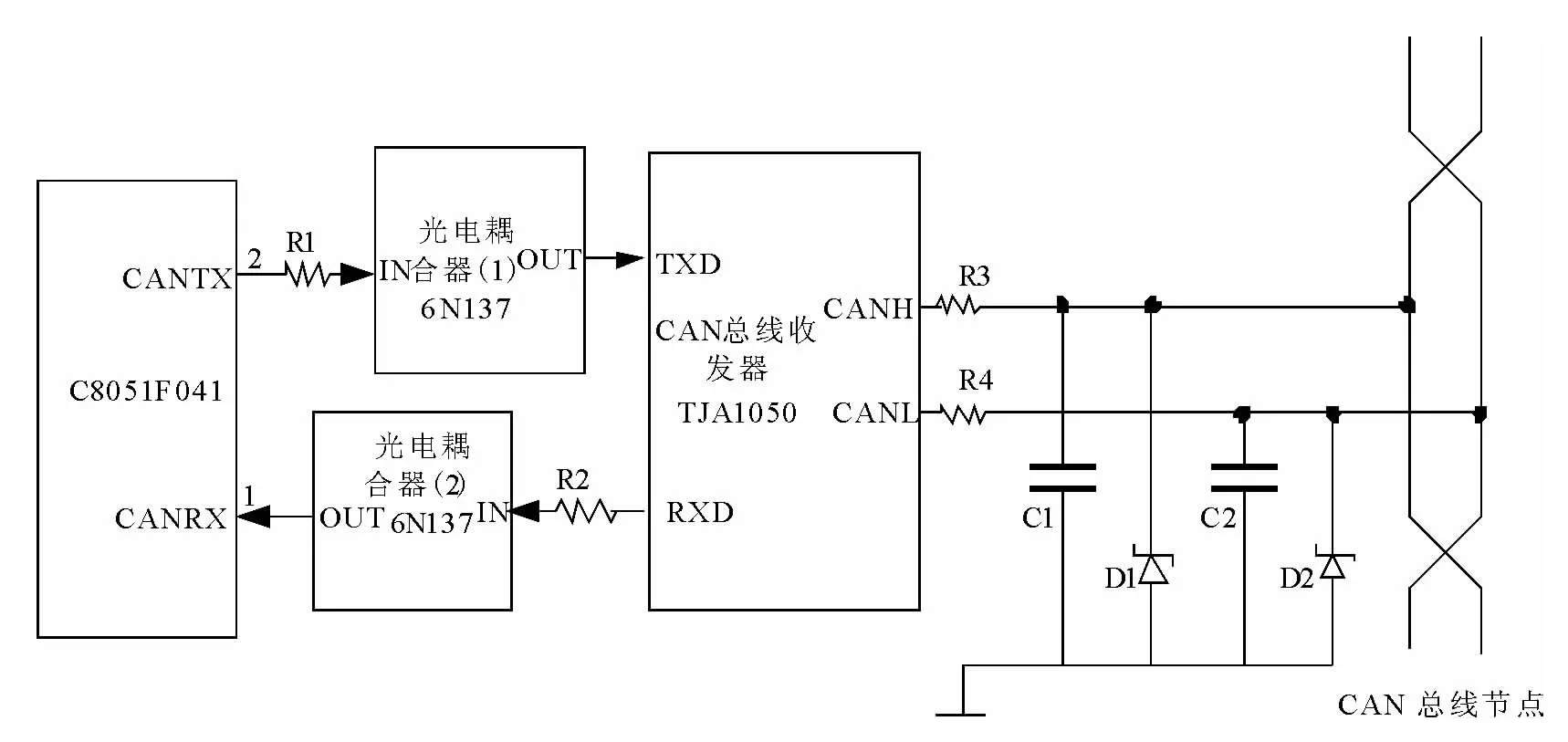
图3 CAN总线电路图
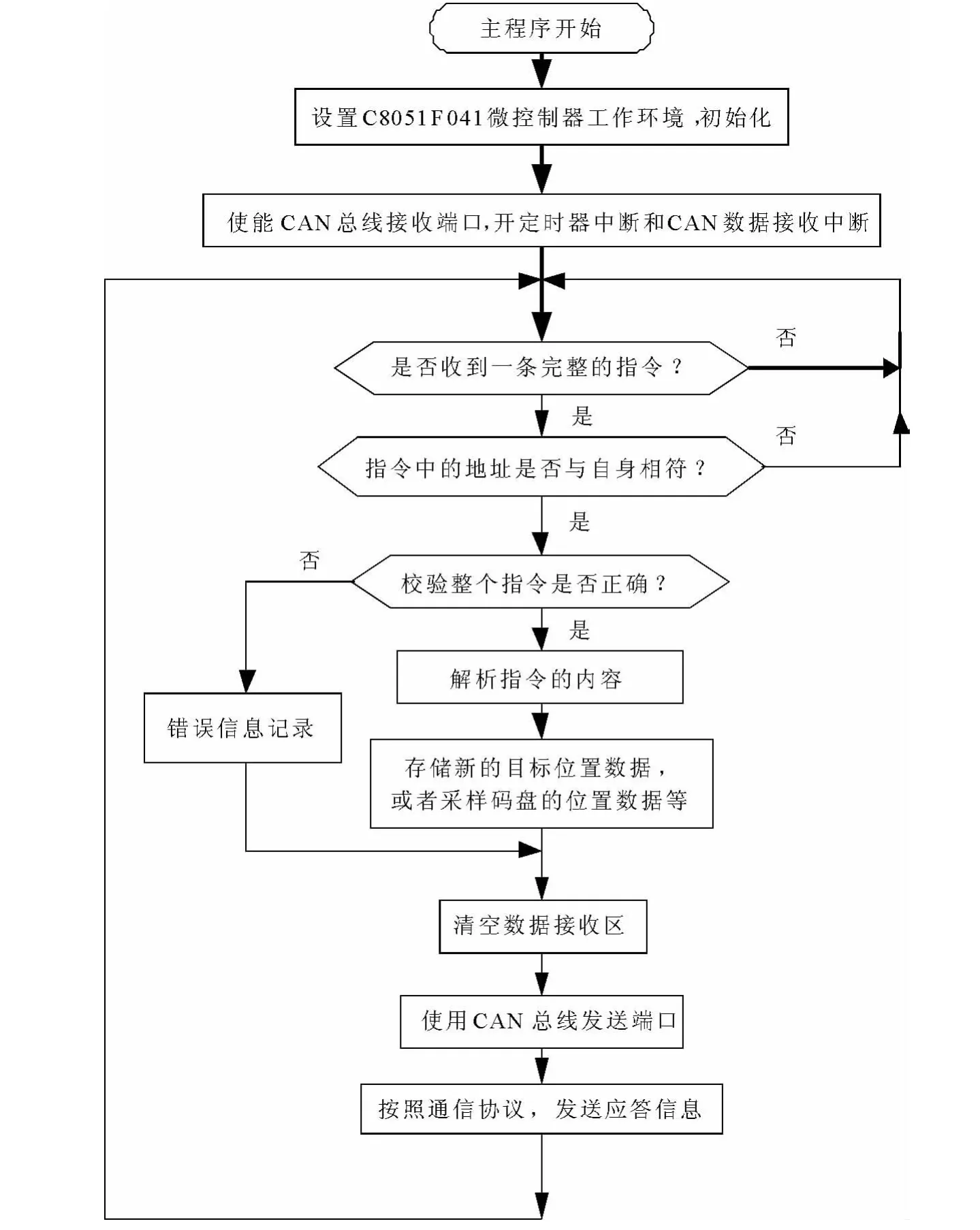
图4 主程序流程图
1.1 关节控制器硬件电路设计
本设计采用C8051F041高速混合信号ISP FLASH微控制器作为控制单元.这个芯片的优点是尺寸小、外扩资源少,很容易实现对C8051F041的全速调试.由C8051F041微控制器组成关节控制器硬件电路的硬件结构框图见图2[7].
1.2 接近开关和增量式编码信号处理电路
在图2中,编码器的信号输入接口,采用3个通道的 TTL 电平,即 A、B、I三路信号,A→OUTc,B→OUTb,I→OUTa.一支固定在关节控制器运动的极限位置,其信号通过I/O口被C8051F041微控制器不断查询.另一支霍尔接近开关用于绝对零位检测,必须采用中断的方式进入C8051F041微控制器.
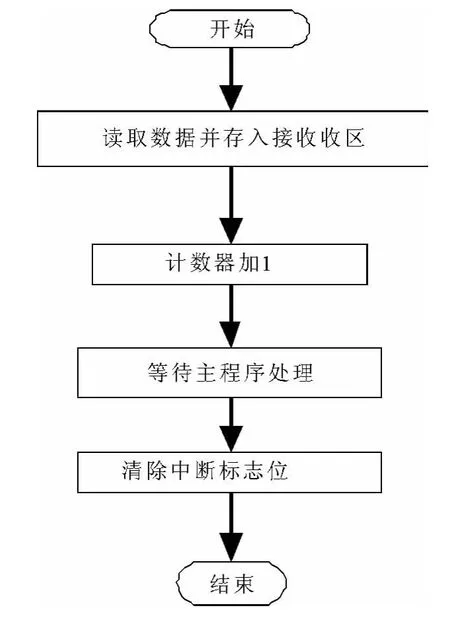
图5 控制信息接收和中断服务程序流程图
1.3 控制器CAN设计
主控制器的计算机经过现场总线与各部位控制单元通信,由相应的执行器来完成各部位关节的协调控制;现场总线利用CAN总线.充分利用CAN总线的通信距离远(最远可以达到10km)、速率高(最高达到1Mbps)的特点,在没有CAN总线网桥、中继器或集线器情况下,关节控制器总数最大达到110个,对于仿人机器人控制系统完全能满足.C8051F041微控制器有CAN总线控制器,没有CAN总线收发器,采用TJA1050作为CAN总线收发器,CAN总线电路图见图3.CAN总线接收器TJA1050的输入与C8051F041微控制器的引脚1 CANRX相连,CAN总线接收器TJA1050的发送输出与C8051F041微控制器的引脚2 CANTX相连[8].
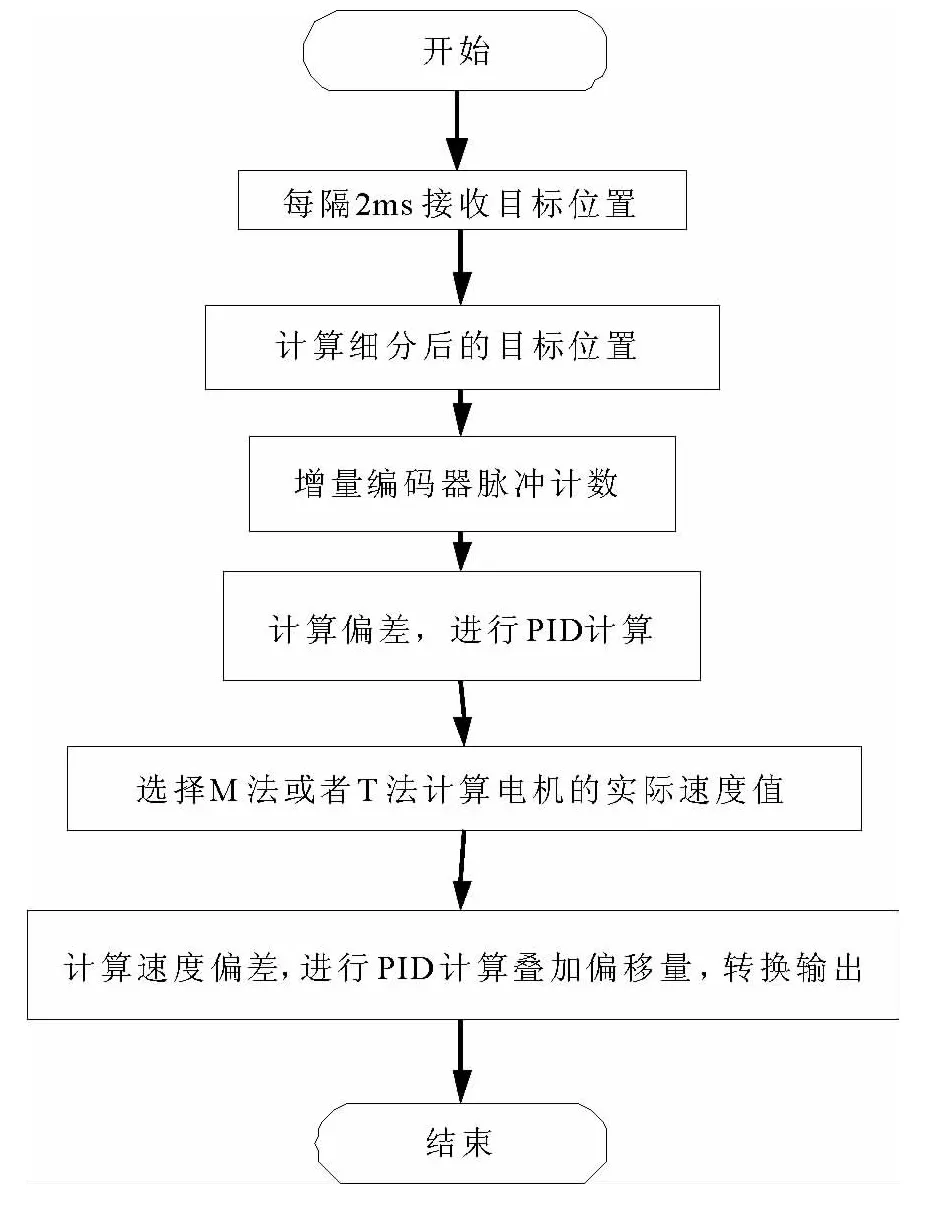
图6 控制周期的定时中断服务程序流程图
2 软件设计
2.1 关节控制器主程序
主程序的流程见图4.
初始化操作主要包括:设置C8051F041片内VDD监视器、看门狗定时器和时钟振荡器,CAN节点的初始化、报文发送和报文接收,设置定时器∕计数器,设置寄存器和数据存储区,设置中断控制器等.
2.2 控制信息接收和中断服务程序设计
在控制信息接收和中断程序中,首先是程序读取接收器的数据,然后将数据存入数据接收区中不执行任何动作,计数器加1,等待主程序处理,当主程序处理完一条完整指令信息后,中断结束.
2.3 控制周期的定时中断服务程序设计
将C8051F401的定时器∕计数器设定为2ms的定时,于是每隔2ms就进入定时中断服务程序读取位置和速度的控制信息,然后计算位置的偏差进行 PID运算,最后通过 C8051F041微控制器DAC0输出控制电机.对于每个50ms的周期里,主控制器的计算机通过CAN现场总线将规划的位置信息发送给各部位的执行器去执行[9].由于,目标位置的脉冲信号的频率是增量编码器信号频率的四倍;所以,当控制单元读取新的位置信息后,立即对以前的信息进行清零,将新的位置信息定位各个关节的实际位置;进而驱动执行器的动作[10].根据实际情况,还可以让主控制器的计算机实时查询电机的实际位置,达到实时控制的目的.为了实现控制的精确、可靠的目的,我们这里将各执行器的精度设定在0.1度以内.
3 结论
通过研究表明,这种基于CAN总线的仿人机械人机械臂的分布式控制方式,能够很好地提高机器人的总体性能指标,充分完善了人机实时交换的能力;在实践中得到了充分的验证.同时,由于采用了基于CAN总线的分布式控制模式,使机械臂控制系统具有了高度的实时性、完善的扩充性、广泛容错性、精确地可靠性等优点.所以可以预言,在未来相关的控制领域里会有广阔的应用前景.
[1](美)Saeed B.Niku.机器人学导论—分析、系统及应用[M].北京:电子工业出版社,2004.
[2]史庆军,李敏,姜重燃,等.仿人型机器人关节驱动系统设计[J].微计算机信息,2009,12-15.
[3]单丽娜,姜重然,陈文平.基于DSP仿人机器人关节控制器设计[J].现代电子技术,2009.
[4]姜重然,陈文平,徐斌山.基于CAN总线分布式粮情管控系统的研究与设计[J].低压电器,2010,(14):49-52.
[5]郑剑飞.六自由度机械臂分布式控制系统的设计与研究[D].哈尔滨:哈尔滨工业大学.2006.
[6]姜重然,陈文平,徐斌山.永磁同步电机控制系统控制器参数的优化设计[J].电机与控制应用,2011.38(6):26-30.
[7]张毅刚,彭喜元.单片机原理与应用设计[M].哈尔滨:哈尔滨工业大学出版社,2008.
[8]饶运涛,邹继军,王进宏.现场总线CAN原理与应用技术(第2版)[M].北京:北京航空航天大学出版,2007.
[9]Jean- Pierre,Thomesse,Fieldbus.Technology in Industrial Automation[J].Industrial Electronics,2005,3(6):1073-1174.
[10]赵晓军,黄强,彭朝琴.基于人体运动的仿人型机器人动作的运动学匹配[J].机器人,2005,27(7):358-379.
