基于CAN总线的整车控制系统设计
2014-06-13万礼华董传培
万礼华,董传培,肖 颖
(重庆金美通信有限责任公司,重庆400030)
1 引言
上世纪九十年代,一些发达国家对电动汽车进行了研究并相继投入使用。电动汽车主要分为三种:纯电动汽车,混合动力汽车,燃料电池汽车。由于混合动力汽车结构较简单以及节能减排等方面具有一定优势,因而成为研究热点。混合动力汽车(Hybrid Electric Vehicle,HEV)根据动力流传递方式的不同可分为三类:串联式(SHEV)、并联式(PHEV)、混联式(PSHEV)。
整车控制器(Vehicle Control Unit,VCU)是HEV的控制平台和指挥中心,实现能量管理和动力分配,负责采集各种物理量并做出正确判断,控制发动机和电机等执行器件[1-3]。
2 混合动力总成结构
混合动力总成结构采用基于CAN总线的控制系统,由整车控制器VCU、发动机控制器(Engine Control Unit,ECU)、电机控制器(Motor Control Unit,MCU)、ISG控制器、变速箱控制器(Transmission Control Unit,TCU)和电池管理系统(Battery Manage System,BMS)等组成。根据汽车行驶工况,对发动机、电池、电动机和变速器进行综合控制,达到整车动力性、油耗和排放最佳的控制目标。
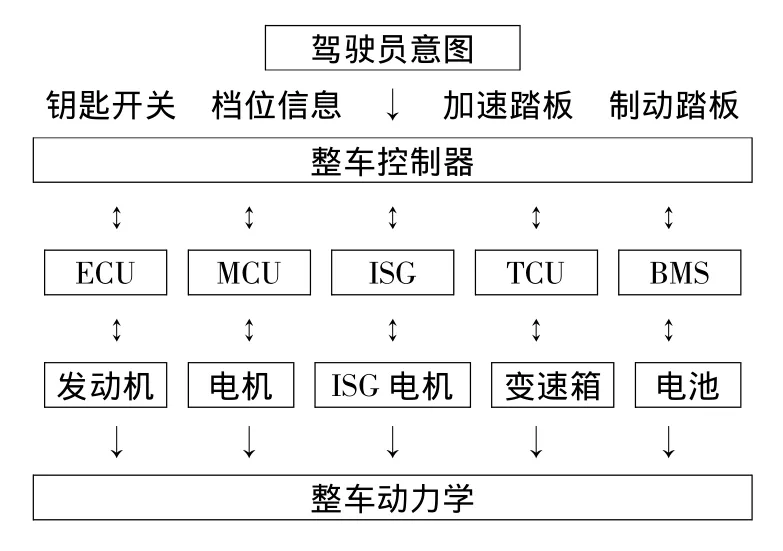
图1 整车控制系统结构图
3 整车控制器系统开发
整车控制器实时采集加速踏板信号、钥匙信号和档位信息,根据发动机、电机和电池管理系统通过CAN网络接收的信息,按照既定控制策略进行能量管理和动力分配。稳定可靠的软硬件和合理的控制策略是保证整车控制器安全性、动力性和经济性的前提。
3.1 整车控制器硬件系统
整车控制器硬件系统采用Freescale公司汽车级高性能的16位HCS12X处理器芯片,该芯片最高时钟频率可到40MHz,片内资源丰富,集成了A/D转换模块,PWM模块,兼容CAN2.0B协议的CAN模块等。采用模块化设计思路,将VCU硬件电路划分为电源模块、信号处理模块、驱动模块、CAN通信模块。采用MC9S12XEQ512作为控制主芯片;采用NXP公司的TJA1050作为CAN收发器;采用Infenion公司的驱动芯片TLE6240对继电器、指示灯和电磁阀进行驱动;模拟信号、数字信号和频率经过信号处理后送入单片机进行采集。
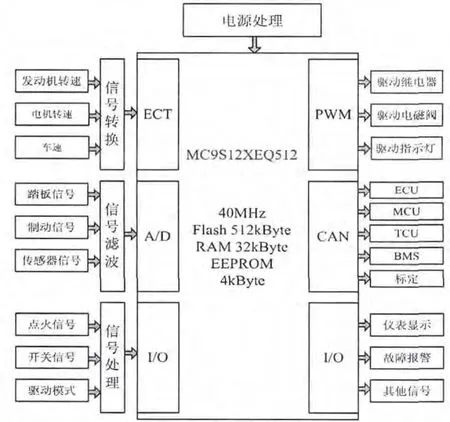
图2 整车控制器硬件框图
3.2 整车控制器软件设计
整车控制器的软件环境为CodeWarrior 2.10,使用BDM下载器或Bootloader进行引导程序下载,BDM可实现在线调试和编程,适合于样件开发阶段;Bootloader进行程序下载,具有程序更新和在线更新功能,方便程序升级和维护。
3.3 整车控制器策略设计
整车控制器主要实现驾驶员意图识别与能量管理和动力分配,其控制策略主要分为三种:扭矩分离式控制策略、电力辅助控制策略以及模糊控制策略[4]。主要采用电力辅助控制策略进行策略设计和仿真分析[5]。
电力辅助控制策略是混合动力汽车较为常用的一种控制策略。其主要思想是:将发动机作为汽车的主动力源,电机驱动系统作为辅助动力源,当所需要的驱动转矩超过发动机的最大扭矩时,ISG工作在电机状态,输出辅助转矩。同时,将蓄电池的荷电状态SOC保持在一定范围内,混合动力汽车运行状态分类如表1所示。
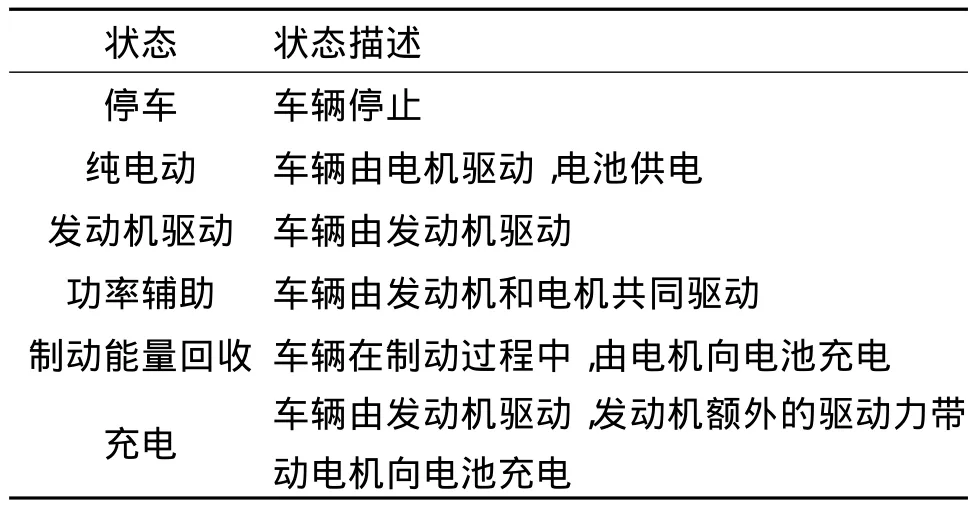
表1 混合动力汽车状态分类
表中纯电动和功率辅助状态下,由电机工作或辅助发动机工作;低速或者怠速行驶时,汽车仅由电机驱动,从而降低了油耗,减少了排放。
在电力辅助控制策略的控制下,发动机和电动机实现了充电模式、发动机驱动模式和混合驱动模式的转换,发动机承担了主动力源,电机作为辅助动力源,实现能量回收利用;根据加速踏板信号和制动踏板信号获得当前转速下的转矩需求,转矩需求在发动机和电动机二者之间进行合理分配,实现了能量管理和动力分配。
4 标定监控软件
利用USB-CAN提供的API函数,利用C++编写上位机监控软件,该上位机监控软件具有如下功能:存储和显示CAN总线上的数据;对整车控制器进行标定,通过dSPACE对整车系统进行在环仿真,进行输入输出信号测试、CAN通信测试、驱动能力测试和控制器逻辑测试。系统能够与Matlab/Simulink进行无缝连接[6],利用仿真软件ADVISOR对整车系统进行仿真,硬件在环仿真如图3所示。
采用250kbps或者500kbps的通信波特率,结合实时模拟和真实的CAN总线来验证系统,通过上位机和USBCAN监测整车试验工况下的性能和CAN的收发数据情况。发动机额定功率为72kW,额定转速为6000rpm,蓄电池的额定功率为10kW。仿真结果如图4所示。上位机监控显示CAN通信正常,CAN总线工作稳定、可靠,具有较强的抗干扰能力,完全满足混合动力汽车的实时控制要求。

图3 硬件在环仿真实验
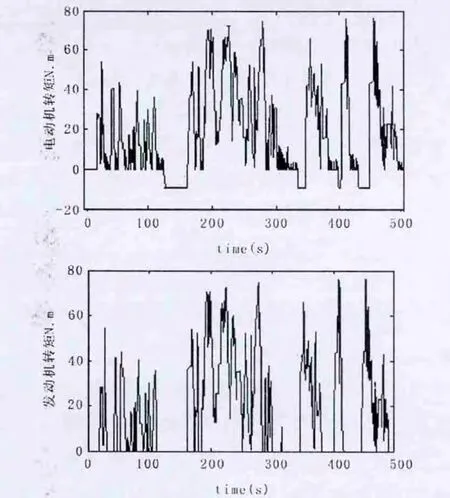
图4 电动机转矩和发动机转矩
5 结束语
提出了一种基于CAN总线的混合动力整车系统设计方案,实现了整车控制器硬件设计和软件设计。采用电力辅助控制策略对该整车控制器进行了硬件在环仿真,仿真结果表明:基于CAN总线的混合动力汽车控制系统具有良好的实时性和可靠性,可以通过发动机和电机协调控制实现能量管理和动力分配,达到经济性和安全性要求。
[1]KT.Chau,YS.Wong.Overview of power management in hybrid electric vehicle[J].EnergyConversion and Management,2002:1953 -1968.
[2]C.C.CHAN.The State of the art of electric and hybrid vehicles[J].in Proceeding of the IEEE,2002,90(2):247-275.
[3]王银灰,刘兴华,仇滔.混合动力电动汽车的研究[J].内燃机,2003(3):27-31.
[4]彭涛,陈全世.并联混合动力电动汽车的模糊能量管理策略[J].中国机械工程,2003,14(9):787 -800.
[5]Delpart S,Guerra T M,Paganelli G,et al.Comtrol strategy optimization for a hybrid parallel powertrain[J].In:Proceedings of the American Control Conference,Arilington,2001:1315 -1320.
[6]Zhang Xiao - wei,He Hong - wen Rui.Hardware in Loop Simulation for Vehicle Controller in HEV based on Dspace.2010 3rd Interational Conference on Advanced Computer Theroy and Engineering[C].Chengdu,China,2010(2):489-492.
