自动化监测技术在天津地铁3号线金狮桥站—天津站站盾构穿越高速铁路工程中的应用
2014-06-09李明
李 明
(中铁隧道集团技术中心,河南洛阳 471009)
自动化监测技术在天津地铁3号线金狮桥站—天津站站盾构穿越高速铁路工程中的应用
李 明
(中铁隧道集团技术中心,河南洛阳 471009)
为解决对盾构施工影响范围内的高速铁路沉降监测问题,以天津地铁3号线金狮桥站—天津站站盾构施工为依托,对既有城际铁路进行自动化监测。主要研究内容及结论为:1)介绍该工程穿越城际铁路情况及高铁监测特点和需求,说明高铁监测中必须实施自动化监测手段;2)高铁监测项目较多,对路基及钢轨沉降自动化监测重点项目进行研究;3)结合铁路特点进行静力水准和自动全站仪2套自动化系统的测点布设以及在实施过程中的注意事项,说明只有充分考虑环境特殊性才能有效发挥每种自动化监测手段的预期效果;4)通过数据比较,发现两者稳定性较好,说明采用智能型电子全站仪加棱镜监测手段解决目前钢轨自动化监测难题的手段是可靠的,为以后的高铁钢轨自动化监测提供一种新思路。
高速铁路;静力水准;智能型电子全站仪;自动化监测;钢轨;盾构
0 引言
随着城市地下交通规模的扩大及高速铁路网的逐渐形成,盾构区间下穿高速铁路将不可避免。如何保证施工期间的高铁运营安全,是地铁施工亟需解决的问题。其中,作为重要角色的监测更应引起高度重视,只有及时发现问题才能防患于未然。
目前,国内自动化监测应用在既有地铁隧道的案例比较多,如崔天麟等[1]、张成平等[2]分别结合北京地铁5号线崇文门站下穿既有隧道工程,详细叙述了各种自动化监测的应用,也为之后既有地铁线监测开拓了视野;胡明庆等[3]结合武汉市轨道交通2号线隧道工程盾构下穿京广铁路施工实例,针对轨面采取了常规的监测实施,总结了铁路轨道受盾构穿越影响的规律;张建坤等[4]在北京地铁8号线二期工程下穿某既有线路基的工程中,使用了静力水准系统对路基沉降进行了自动化监测;张建坤等[5]对户外静力水准在安装、使用过程中的影响测量精度的关键技术问题进行了探讨;刘永中[6]通过对测量机器人自动化变形监测的研究与应用,实现了地铁隧道在狭长空间的自动监测,解决了实时监测的难题;焦莹等[7]肯定和描述了激光扫描技术(测量机器人)在隧道及重要工程中的应用;刘银伟[8]以天津地铁3号线铁东路站—北站盾构区间隧道为背景,对盾构施工穿越既有铁路引起的地表沉降、深层土体位移以及和应力分布规律进行了研究,工程实例与本文非常相近,但没有对钢轨实施自动化监测。
针对封闭运行的高速铁路实施自动化监测的案例较少,且自动化监测一般只针对路基或结构,针对钢轨本身的自动化监测案例就更少。本文结合天津地铁3号线天津站站—金狮桥站盾构区间穿越京津城际铁路工程,提出了2种自动化监测结合运用的办法。
1 工程概况
天津站站—金狮桥站区间在右线DK15+446.32(津山铁路里程约下行线K137+596.45)处下穿津山铁路线,在右线DK15+411.94(京津城际下行线里程K116+457.73)处下穿京津城际。
津山铁路线为双线铁路(路基宽约7.2 m),位于隧道上方,与隧道基本正交(相交角约90°),交汇区域共22 m。京津城际为双线铁路,路基顶宽为13.4 m,底宽为27 m,高5 m,桩基础底端距离隧道结构顶约为2 m。
天津站站—金狮桥站区间隧道内径为5.5 m,隧道顶在津山铁路下埋置深度约17.8 m。在城际铁路下埋深约24 m,主要通过地层为粉质黏土、粉土层及粉砂层。本节点区域范围有影响的地下水有2层,分别为上层第四系孔隙潜水和赋存于第Ⅱ陆相层及以下粉砂、粉土中微承压水。
隧道与铁路平剖面如图1和图2所示。

图1 隧道与铁路位置关系平面图Fig.1 Plan sketch showing relationship between shield-bored Metro tunnel and existing high-speed railway
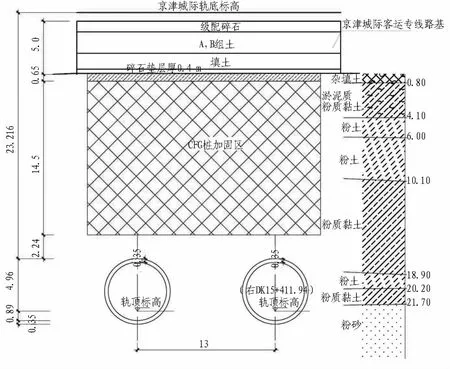
图2 隧道与铁路位置关系剖面图(单位:m)Fig.2 Profile showing relationship between shield-bored Metro tunnel and existing high-speed railway(m)
2 选择自动化监测的原因
1)数据采集速度快、频率高,满足各方尤其是第三方产权单位(铁路部门)对数据关注的需要。
2)对于处于封闭运行的高速铁路,不允许在白天用常规人工上道监测,必须采取自动化监测。
3)对于特殊时间段如雨天、大雾天气,人工上道监测非常危险,而监测工作不能因此停滞,必须有自动化监测项目提供的数据。
4)铁路内来往列车较多,人工上道作业风险较大,一旦冒进作业,或者出现协调问题及通讯故障不能及时了解列车接近情况,则会带来严重后果。
3 监测对象及手段
高铁监测最主要的监测对象是铁路路基、铁路钢轨及接触网杆,最重要的监测项目是隆沉监测。本工程中,在监测过程中对上述主要监测对象采取的自动化监测手段分别是静力水准监测、智能型电子全站仪监测。当然,也可以采用电水平尺等类似监测手段,但应考虑到电水平尺设置在轨枕时的固定问题,原则上禁止对既有地铁设施进行钻孔等破损性施工。应根据现场条件选择合适的接触网杆监测方法,经济允许时,尽量采用自动化监测。
4 测点布设及注意事项
自动化监测成本较高,测点布设除了要满足工程需要外,还要兼顾经济,在点位的选取上应深思熟虑。下文结合本工程穿越既有铁路的工程实际,介绍测点布设的方法及注意事项。
4.1 静力水准自动化监测
4.1.1 监测目的及原理
1)监测目的。实时监测施工影响范围内的路基隆沉情况。
2)监测原理。该方法及所选用的仪器依据连通管原理的方法,用电容传感器,测量每个测点容器内液面的相对变化,再通过计算求得各点相对于基点的相对沉陷量。
4.1.2 测点布设
1)测点布设范围为盾构左右轴线外各30 m距离,基点布设在30 m外。
2)测点布设在沿轨道走向的一侧路基上,如有要求则两侧路基均可布设。
3)在左、右轴线上方各布设一个测点,隧道轮廓线上各布设一个测点。如盾构左右线间隔较远,则在中间布设一个测点,外轮廓线外按照3,5,7,9 m位置各布设一个测点。在30 m外设置一个该断面静力水准基点。静力水准测点布设如图3和图4所示。
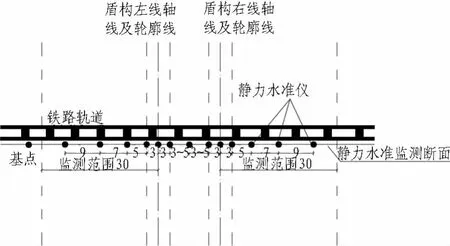
图3 静力水准测点布设平面示意图(单位:m)Fig.3 Plan layout of hydrostatic leveling monitoring points(m)

图4 静力水准测点布设剖面示意图(单位:m)Fig.4 Profile showing layout of hydrostatic leveling monitoring points(m)
4)具体布设时,在预设位置先将道床碎石除去,露出地基土表面,之后浇注边长约15 cm的混凝土墩台,形成一个稳定的基座后,再将静力水准仪用螺栓固定在基座上,周围回填碎石。静力水准布点示意如图5所示。

图5 静力水准布点示意详图Fig.5 Detail of installation of hydrostatic leveling monitoring points
4.1.3 注意事项
1)测点布设要牢固可靠,日常要进行测点巡视,避免测点松动给列车运营造成危害。
2)该系统布设在露天环境,要考虑到夏季蒸发、冬季冰冻影响,在进行液体灌注时要加入适当的防冻液并进行油封。建议夏季对静力水准仪采取一定的遮盖措施。如确实因为其他因素使液体明显减少,影响系统工作,则应在保留之前隆沉值后,在最短的时间内对整个管路重新注入液体,并调整系统重新工作。
3)由于系统布设在铁路路基上,既受露天环境影响,又受列车运营震动影响,故在工程施工影响前,应持续观测1~7 d,以便掌握外界环境带来的数据变化规律;然后以数据变化相对稳定的时间段采集的数据作为修正参考,重新输入每个仪器计算参数作为初始值,下次测量选取在相同的时间段内进行。
4)建议在每个静力水准墩台上设置一个人工沉降测点,以便在天窗时间内进行人工复核。
5)应经常性地比较与另一套自动化系统智能型电子全站仪监测的数据,以便相互佐证,尤其是在不允许人工上道复核的时间内。
4.2 智能型电子全站仪监测
4.2.1 监测目的及原理
1)监测目的。实时监测施工影响范围内的铁路钢轨隆沉情况。
2)监测原理。本系统采用徕卡TS30全站仪,相对于一般全站仪具有较高的测量精度和自动识别、搜索目标能力,同时具备最快的加速度和转速。其采用的压电陶瓷驱动技术,使全站仪拥有极佳的动态跟踪性能帮助测量人员极大地提高作业效率,且运行声音较普通马达驱动要安静得多,高效、节能、环保。
自动目标识别(ATR)原理是先自主发射一束红外光束,按类似自准值的原理经目标棱镜反射后由CCD相机所接收,然后通过图像处理功能实现目标的精确照准,不受白天黑夜影响。
4.2.2 测点布设
1)测点布设在施工主要影响区域,对应静力水准测点位置,在左右轴线上方各布设一组(2个,左右轨各一个)测点,隧道轮廓线上各一组测点,左右轴线中间布设一个测点,外轮廓线外5 m处各布设一组测点。智能型电子全站仪测点布设平面如图6所示。
2)具体布设时将棱镜通过连接构件固定在钢轨上(如图7所示),将智能型电子全站仪固定在自制的支架上,支架通过混凝土堆浇注在稳定的平面上。整个过程要保证支架、混凝土堆具有足够的稳定性,将测量仪器连接在无线发射终端上。智能型全站仪设置如图8所示。棱镜测点布设实景如图9所示。

图6 智能型电子全站仪测点布设平面示意图(单位:m)Fig.6 Plan layout of intelligent electronic total station monitoring points(m)
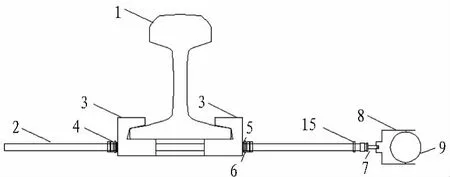
图7 连接构件结构示意图Fig.7 Structure of connection part

图8 智能型全站仪设置示意图Fig.8 Installation of intelligent electronic total station
4.2.3 注意事项
1)智能型电子全站仪的位置选取极为重要,难度也较大。要有一定的高度,确保视野的开阔,距离不能太远,要在施工影响区域外,要避免风吹日晒,要有稳定电源,还要做好防盗。在城市环境中,满足上述所有要求是很挑剔和苛刻的。因此,最佳的选择是将仪器设置在附近满足条件的建筑物中,且应打开窗户。另外一个要素就是要固定好仪器本身,避免晃动及仪器附近经常性的人员走动等外界原因干扰。另外,尽量采用高精度的全站仪,测距精度在1 mm+2 ppm,测角精度在1″及以上。上述采用的智能型电子全站仪为徕卡TS30(0.5″,0.6 mm+1 ppm)。
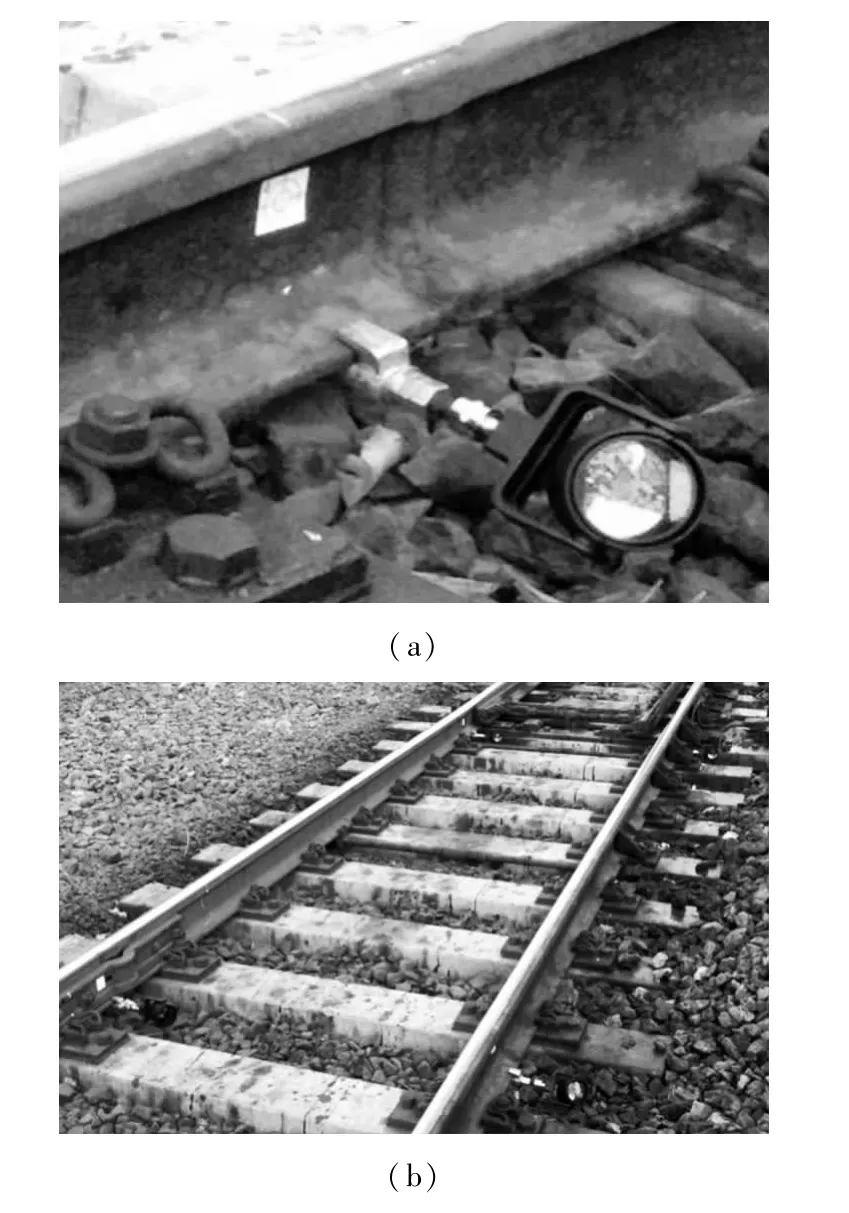
图9 棱镜测点布设实景图Fig.9 Picture of prism monitoring point
2)当仪器位置选择好后,应先架设仪器再指导棱镜测点的布设。仪器操作人员应与轨道棱镜测点布设人员通过对讲机随时沟通,布点人员要转动棱镜对准全站仪方向,以确保全站仪能够看到并能自动搜索成功。尤其是在需要布设很多棱镜测点情况下,为保证全站仪都能自动识别和搜索到,反复微整棱镜位置也是必不可少的重要步骤。
3)相对静力水准自动化系统,该套系统受外界环境的影响更加敏感,故在工程施工影响前,更应做好数据积累工作,应持续观测1~7 d或者更长时间,直到彻底掌握外界环境带来的数据变化规律。如数据变化幅度较大,而测试频率要求又较高,则可通过比对连续多天、每天整点的数据,然后对每个整点的多次数据各自求平均值,以得到各整点的环境影响参考值,待下次在该时间取得数据后,减去环境影响参考值即得到该时间段内测点的工程影响变化量。
4)建议在每个棱镜位置对应的轨道上设置一个人工沉降测点,以便在天窗时间内进行人工复核。
5)应经常性地比较与另一套自动化系统静力水准监测的数据,以便相互佐证,尤其是在不允许人工上道复核的时间内。
5 数据对比分析
如图10所示,选取同一位置附近时,采用2种方法的测点数据进行比较,发现整体吻合性较高,普遍差值在-1~1 mm,最大差值为0.7 mm。静力水准数据相对全站仪数据较为稳定和滑顺,部分时间受钢轨振动原因及全站仪系统原因影响,全站仪数据会有一定的跳跃,但总的效果较为理想。
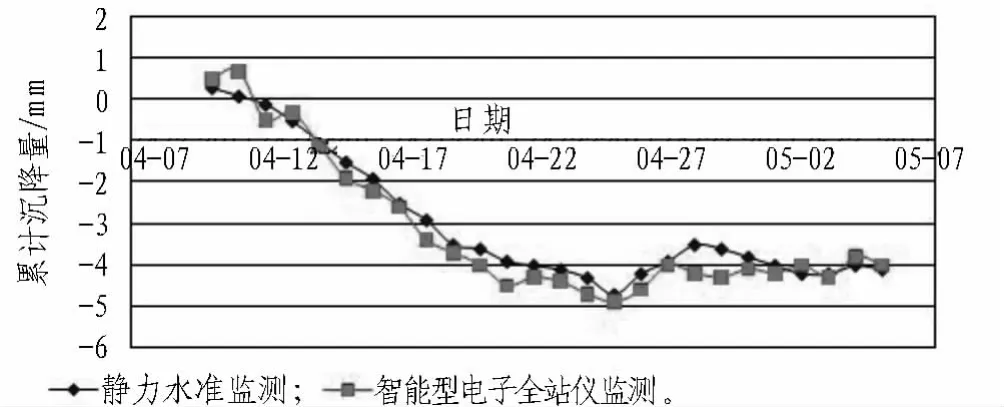
图10 测点沉降历时曲线图(2011年)Fig.10 Settlement Vs time in 2011
如图11所示,静力水准与全站仪两者沉降曲线在形态上最大的不同产生在铁路工务部门抬道整修等特殊工况下。
由于棱镜是通过连接构件固定在钢轨上的,故钢轨的人为干预过程也得到了监测系统的记录。由图11可知,在轨道沉降约4.5 mm时,工务部门进行了轨道抬升修整工作,上抬幅度约6.5 mm,之后会因为扰动后密实稳定需要,回落约2 mm,尽量使钢轨达到预定理想状态,确保行车安全。而静力水准系统是安装在铁路路基上的,故累计沉降无法得到消除。
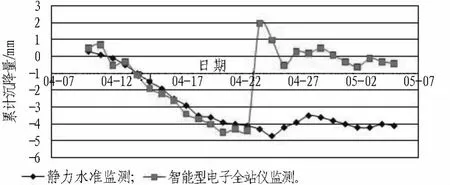
图11 特殊状况下沉降历时曲线图(2011年)Fig.11 Settlement Vs time under special conditions in 2011
6 结论与讨论
通过天津地铁3号线金狮桥站—天津站站盾构穿越高铁施工工程,总结出了针对高速铁路采用的自动化监测方法,尤其是采取棱镜+智能型全站仪进行钢轨自动化监测是很好的一种选择,可以有效解决钢轨监测难题,但要注意方式和方法,做好配套准备。当然,在经济条件允许的情况下,应采用2种或多种自动化监测手段相结合的方法,以便相互印证,避免在露天情况下某一套系统出现故障导致无法及时获取数据。由于本工程只采用了一台自动全站仪,因此监测范围、监测的棱镜数量有限,如需要较大范围测量,则需要增加仪器。较多仪器设备站点的设置问题还需要进一步研究和探讨,可能会发现更多、更先进高效的方法。
(References):
[1] 崔天麟,肖红渠,王刚.自动化监测技术在新建地铁穿越既有线中的应用[J].隧道建设,2008,28(3):359-361.(CUI Tianlin,XIAO Hongqu,WANG Gang.Application of automatic monitoring technology in construction of Metro works crossing below existing Metro line[J].Tunnel Construction,2008,28(3):359-361.(in Chinese))
[2] 张成平,张顶立,骆建军,等.地铁车站下穿既有线隧道施工中的远程监测系统[J].岩土力学,2009,30(6):1861-1866.(ZHANG Chengping,ZHANG Dingli,LUO Jianjun,et al.Remote monitoring system applied to the construction of Metro station undercrossing existing Metro tunnel[J].Rock and Soil Mechanics,2009,30(6):1861-1866.(in Chinese))
[3] 胡明庆,王金峰,李双平,等.地铁盾构穿越铁路专项监测[J].人民长江,2010(20):94-96.(HU Mingqing,WANG Jinfeng,LI Shuangping,et al.Special monitoring of Metro shield crossing railway[J].Yangtze River,2010(20):94-96.(in Chinese))
[4] 张建坤,徐俊峰,徐国双.静力水准监测系统在地铁8号线第三方监测中的应用[J].现代城市轨道交通,2011 (S1):136-139.
[5] 张建坤,陈昌彦,白朝旭,等.影响静力水准监测质量的关键技术问题探讨[J].工程勘察,2012(9):73-77,82.(ZHANG Jiankun,CHEN Changyan,BAI Chaoxu,et al.Study on the key technical problems related to accuracy of HLS[J].Journal of Geotechnical Investigation&Surveying,2012(9):73-77,82.(in Chinese))
[6] 刘永中.地铁隧道测量机器人自动化变形监测研究与应用[J].铁道勘察,2008,28(4):1-3.(LIU Yongzhong.Monitoring research on automatic deformation of surveying robot for Metro tunnel and its application[J].Railway Investigation and Surveying,2008,28(4):1-3.(in Chinese))
[7] 焦莹,董新平.天津站交通枢纽深大基坑工程安全监测[M].北京:人民交通出版社,2012.
[8] 刘银伟.盾构施工下穿既有铁路引起的地表沉降分析及数值模拟[D].洛阳:河南科技大学结构工程学院,2012.
Application of Automatic Monitoring Technology in Construction of Shield-bored Metro Tunnel Crossing Underneath High-speed Railway in Urban Area
LI Ming
(Technology Center of China Railway Tunnel Group Co.,Ltd.,Luoyang 471009,Henan,China)
The shield-bored tunnel from Jinshiqiao Station to Tianjin Railway Station Station on No.3 Line of Tianjin Metro crosses underneath Beijing-Tianjin high-speed railway.During the construction of the shield-bored tunnel,automatic monitoring is made for the high-speed railwy.The main content of the article is as follows:1)The details of the shield boring crossing underneath the existing high-speed railway lines,as well as the features and requirements of the monitoring of the high-speed railway,are presented.It is concluded that automatic monitoring must be made for the high-speed railway.2)Many items of the high-speed railway should be monitored.In the paper,the automatic monitoring of the subgrade and steel rail of the high-speed railway is studied.3)The layout of the monitoring points of the hydrostatic leveling monitoring and that of the total station monitoring,as well as the issues to which special attention should be paid,are presented in detail.It is concluded that the effect of each monitoring method cannot be maximized until the particularity of the specific environment is considered.4)The analysis on the monitoring data shows that the automatic monitoring system consisting of intelligent electronic total station monitoring and prism monitoring is reliable in the monitoring of the high-speed railway.The paper can provide a new concept for the automatic monitoring of the steel rails of high-speed railways in the future.
high-speed railway;hydrostatic leveling;intelligent electronic total station;automatic monitoring;steel rail;shield machine
10.3973/j.issn.1672-741X.2014.04.013
U 45
B
1672-741X(2014)04-0368-06
2013-11-04;
2014-02-10
李明(1981—),男,江苏徐州人,2004年毕业于合肥工业大学,土木工程专业,本科,工程师,主要从事地下工程技术与管理工作。
