《工业机器人》实验教学的改革与实践
2014-06-07薛文平李康吉
薛文平,李康吉
(江苏大学 电气信息工程学院,江苏 镇江 212013)
《工业机器人》实验教学的改革与实践
薛文平,李康吉
(江苏大学 电气信息工程学院,江苏 镇江 212013)
分析了《工业机器人》教学中存在的主要问题。根据课程特点,自主开发了上/下位机联调的机械手实验系统。该系统利用机械手的远程通讯模块和RS_232串口协议实现远程控制机械手完成搬运、堆积等基本任务。实践证明,实验方案可充分利用工业机器人的功能模块,有效激发学生的学习热情,在有限课时内锻炼学生的自主开发能力。
工业机器人;实验系统;上/下位机;Visual Basic语言;RS_232串口协议
机器人教学在国内高校中已被列入人工智能、自动化、机电一体化等相关专业的课程之中[1]。在我院,《工业机器人》是较早开设的一门针对高年级学生的专业课,主要介绍机器人运动学/动力学原理、微分变换、运动轨迹以及机器人控制等,内容抽象、逻辑性强[2]。随着机器人被越来越多地运用于各类工业生产中[3_6],掌握工业机器人的基本工作原理,了解它的基本控制过程,对于工科学生而言具有重要意义。反观目前的《工业机器人》教学,由于硬件设备昂贵、设备维护复杂、购置的机器人接口较封闭,学生主要以参观了解和仿真为主,使得理论与实践相对脱节,教学效果欠佳。
本文利用工业机器人控制器提供的串行接口,开发基于机器人远程控制的实验新方案,实现机器人的搬运、堆积等基本功能。这套实验系统的特点是简易直观、模块化,学生能够自己完成整个机器人控制的开发流程,锻炼自主开发能力。
1 安川机械手编程环境
本院购置的工业机器人型号为安川机械手UPJ3_B00,配套的编程环境为JRC System Manager,如图1所示。
图1 JRC System Manager编程环境
该软件包括如下七个功能模块:
1)PACManager(程序管理)。该模块实现程序的新建、查错、编译及下载。
2)Variable Manager(变量管理)。该模块可查看机械手各关节直角及旋转坐标值,如图2所示。
3)DIO Manager(DIO管理)。该模块对输入/输出状态进行管理及显示。
4)Arm Manager(机械手管理)。该模块可直观展示机械手运动轨迹和可动范围,如图3所示。
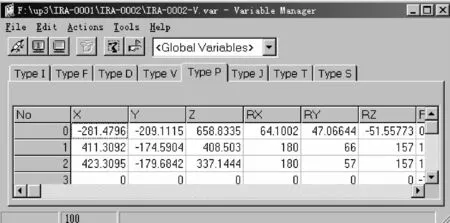
图2 可浏览变量表
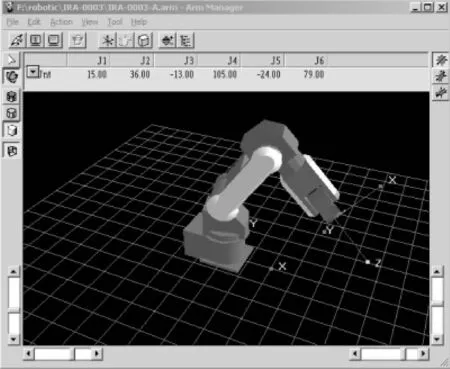
图3 机械手管理模块
5)Vision Manager(视觉管理)。该模块可根据视觉的需要定义窗口。
6)Log Manager(记录管理)。进行历史记录,便于分析问题,为维修提供信息。
7)ROBOTalk Manager(连接管理)。用于设置通信模式,如图4所示。
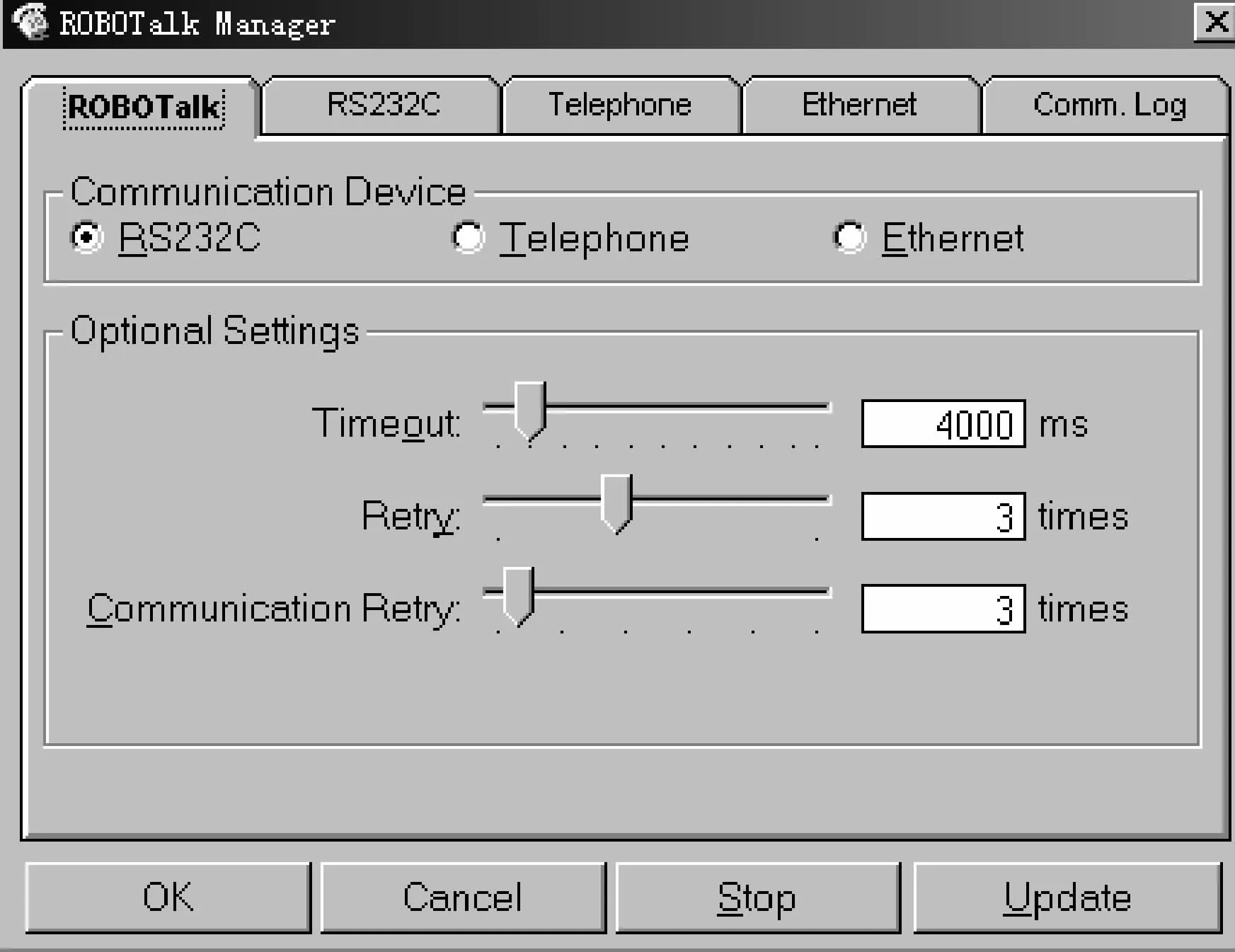
图4 通信设置模式
2 基于串口通信的机械手远程控制
基于JRC System Manager软件的工业机器人系统的透明度不高,对其进行控制实验大部分停留在仿真与手动控制层面。为了充分利用安川机械手的软硬件接口功能,让学生更好地了解并掌握机器人的控制原理及特点,可利用机器人的远程通信模块,安排学生进行机器人编程的实践训练。为此,我们专门设计了一套上/下位机联调的机械手远程控制实验方案,通信方式为RS_232串口方式。该设计方案包括:
1)利用Visual Basic语言的串口通信控件编写上位机软件[7],通过RS_232串口向机器人控制器发送指令,并接收下位机动作完成的反馈信息,如图5所示。

图5 上位机控制界面
2)利用JRC System Manager软件的各功能模块,指导学生学习安川系列机械手的编程语言(类似C语言),并离线编写下位机程序。要求:串口接收字节指令,做出相应的机械手动作,完成后发送信号反馈给上位机。
3 实验教学应用
利用上述机械手远程控制实验方案设计四个机械手动作任务,包括:机械手搬用工件、机械手搭积木以及两者的逆序工作。机械手末端安装有气动夹手,由#106号I/O口控制。
实验步骤如下:
1)打开PAC程序管理器,建立新项目;在文件编辑窗口编写相应的机械手动作程序;保存、编译并下载至机械手控制器,如图6所示。
2)上位机软件打开串口,按下Action 1_Action 4四个按钮中的一个,即发出指令,使机械手完成某个任务。该任务完成后,机械手控制器发送一个同样字符给上位机,表示动作已完成。
图6 下位机程序下载
4 结束语
本文介绍了我院自主设计的简易工业机器人实验系统。配合教学及实验的使用,让学生以一种简便直观的形式了解并掌握工业机器人的基本控制原理,有效激发学生的学习热情。利用该实验平台,学生可以自己动手完成基本的机械手上/下位机联调控制,在有限的教学时间中将理论与实践有机地结合。
[1]朱勇勇.开放式教学机器人运动控制器设计[D].上海:上海交通大学,2007.
[2]蔡自兴.机器人学[M].2版.北京:清华大学出版社,2009.
[3]赵臣,王刚.我国工业机器人产业发展的现状调研报告[J].机器人技术与应用,2009(2):8_13.
[4]刘鑫宇,胡矿,赵东风,等.跨平台的移动机器人地图绘制系统研究[J].实验科学与技术,2012,10(1):17_19.
[5]游玮,孔民秀.重载工业机器人控制关键技术综述[J].机器人技术与应用,2012(5):13_19.
[6]Industry Solutions[EB/OL].[2013_03_16].http:// www.ragroup.com.au/industry/index.htm.
[7]范逸之,陈立元.Visual Basic与RS_232串行通信控制[M].北京:清华大学出版社,2002.
Reform and Practice of EXperimental Teaching for the Course of lndustrial Robot
XUEWenping,LIKangji
(School of Electrical and Information Engineering,Jiangsu University,Zhenjiang 212013,China)
Themain problems existed in theoretical and experimental teaching for the course of industrial robot are analyzed in this paper.According to the characters of this course,a newmanipulator experimental system,which consists ofmaster and slave computers,is proposed.Based on remote communicationmodule of themanipulator and RS-232 serial port protocol,remote control of themanipulator,such asmaking themanipulator carry and build blocks,is realized.Result shows that the proposed experimental scheme can make themost of internal functionalmodules of themanipulator,spur the students'learning enthusiasm effectively and strengthen the students'independent developing capabilities within the limited time in class.
industrial robot;experimental system;master/slave computer;visual basic language;RS_232 serial port protocol
TP391.9
B
10.3969/j.issn.1672_4550.2014.01.018
2013_05_24
薛文平(1982_),女,硕士,讲师,主要从事智能系统、网络控制系统及控制理论方向的研究工作。
