基于贝叶斯分类器的实时图像目标识别实验研究
2014-06-07高志峰周志强
高志峰,汪 渤,周志强
(北京理工大学 自动化学院,北京 100081)
基于贝叶斯分类器的实时图像目标识别实验研究
高志峰,汪 渤,周志强
(北京理工大学 自动化学院,北京 100081)
基于对不完全朴素贝叶斯分类器的分析,提出一种离线训练在线识别的目标图像识别与跟踪实验方法。实验将模板图像与目标实时图像之间的特征匹配问题转换为特征分类问题,并在成像自寻的导引系统上运行。实验结果表明,该方法在保持很高鲁棒性的同时,大幅减少在线目标识别的计算量,具有较强的实时性。
图像处理;贝叶斯分类器;目标识别;实验
在图像实验中,实时图像目标识别与跟踪技术是一项新的教学实验,是图像处理领域一个热门话题。它在公共安全、军事、智能交通等领域都有着非常广泛的应用,对于推动实验教学发展,培养学生的科研创新能力具有重要意义。
图像目标识别问题实际上是模板图像与实时图像之间的宽基线匹配问题,而图像匹配主要应用基于特征的匹配方法,比如Shen和Wang[1]设计的实时灰度角点检测算法,Mikolajczyk和Schmid[2]提出的Harris-Laplacian尺度不变点检测方法,Lowe[3]等提出的尺度不变的SIFT关键点检测方法。但是,以上算法建立和描述算子匹配均需要进行大量计算,由于图像处理大多采用嵌入式处理器,如DSP等,计算速度及能力有限,因此,繁重的计算量对于图像处理、实时跟踪运算非常不利。
Lepetit等人[4_5]将上述宽基线图像特征匹配问题转化为特征分类问题,将描述子方法中最耗时的局部特征向量的计算通过离线训练的方式进行;通过在训练阶段统计局部区域的类条件概率的联合分布,将在线特征分类计算归入贝叶斯分类理论框架之下[6_7]。该方法在对宽基线匹配问题保持很高鲁棒性的同时,大幅减少在线目标识别阶段的计算量,能够较容易地满足跟踪的实时性要求。
1 实验原理
贝叶斯(Bayesian)分类器是一种基于统计理论的分类方法。对于包含M个类别的样本集C= {c1,c2,…,cM},分类器首先计算N维特征向量χ =[χ1,χ2,χN]T属于每个类别标签(i=1,2,3,…,M)的后验概率Pr(ci|χ),通过将其排序并取最大值的方式来得到特征χ所属的类别标签。贝叶斯公式如下:

则分类问题可以归结为如下的最大值问题

朴素贝叶斯(Naive Bayesian,NB)假设特征向量的所有分量之间条件独立,使计算规模和复杂度大大降低。此时,类条件概率Pr(χ|可简化为:

当条件独立假设成立的时候,与其他分类算法比较,朴素贝叶斯分类的准确率是非常高的。但是,在特征点分类的应用中,局部区域内的大量二值比较运算蕴含着一定的内在联系,很难满足上述条件独立假设。针对这种情况,采用不完全朴素贝叶斯分类模型[8](Semi-Naive Bayesian),这种分类模型放松了朴素贝叶斯分类器的条件独立假设,既保留了朴素贝叶斯分类模型的高效性,又考虑到了部分属性间的关联性。将N维特征向量χ=[χ1,χ2,χN]T均分为S个特征子向量,则每个子向量包含R=N/S个二值特征分量,并假设不同子向量之间相互独立,每个子向量内的二值特征分量之间具有相关性。将其中每一个子向量定义为一个fern,用符号Fk表示,单独计算每个fern对应的类条件概率的联合分布Pr(Fk|C=ci),此时式(2)中类ci条件概率的联合分布可表达成所有fern对应的类条件概率之积,则可得基于不完全朴素贝叶斯分类模型的分类表达式:

不完全朴素贝叶斯分类算法在提高算法效率的同时,大大减少了存储量,有利于工程应用。
2 实验方法
将摄像头获取的图像中的每个稳定特征点ki均视为一个类别ci(i=1,2,3,…,M)
离线训练的目标就是通过统计大量样本的方式,获得不完全朴素贝叶斯分类器分类所需的每个类ci及其对于所有fern的类条件概率Pr(Fk|C=ci)。
以模板图像为基准,通过随机仿射变换产生数量为N的训练图像样本集,在每个特征点邻域内,随机选取S×R对像素点,即类别ci的S个fern中的R个二进制特征值分量χj,利用贝叶斯分类器对样本进行分类[9],即可完成离线训练。
在获得特征点类条件概率的联合分布之后,即可对实时输入图像的特征点进行分类,从而实现特征匹配。
3 实验设备
实验利用北京理工大学导航、制导与控制研究所研制的成像自寻的导引系统,其结构框图如图1所示。
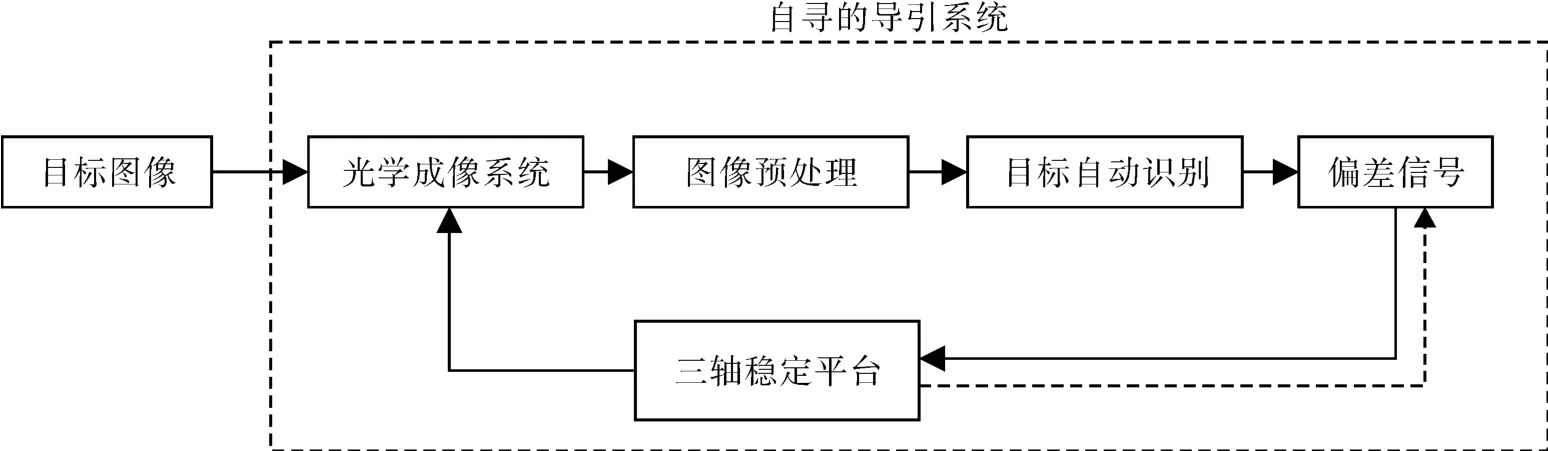
图1 成像自寻的导引系统结构框图
成像自寻的导引系统集高速图像处理技术、复杂与机动目标自动识别与跟踪技术、光学平台伺服控制技术于一体,旨在利用图像信息自主锁定和跟踪目标。系统由光学成像系统、图像处理系统和三轴稳定平台组成,实物图如图2所示。
其中,图像处理系统实现图像预处理和目标自动识别的功能,在硬件上采用了以TI公司的DM642为核心处理器的视频处理系统,该系统不仅支持MPEG4编码,而且也有能力支持H.264编码。DM642的两个双向视频口可配置为四个10位视频输入口,存储器扩展接口(EMIF)可连接SDRAM或通过控制逻辑存储设备,片上以太网口可通过物理接口作为网络通道。DM642可以使学生迅速地着手设计,大大简化开发难度,有效地缩短了开发周期。

图2 成像自寻的导引系统实物图
系统通过JTAG口下载图像处理算法软件,并将离线特征训练阶段生成的贝叶斯分类器分类的结果及二值特征点装载到FLASH中,然后通过在线实时匹配阶段融合已训练完成的特征分类器完成实时目标匹配。
4 实验结果与分析
为了验证本文算法的效果,实验选取了如图3所示的由远及近的三幅模板图像。算法通过目标图像和模板图像的特征匹配识别目标,并随着距离的拉近,目标逐渐变大,算法可以自动更换尺度递增变化的模板图像[10],有效锁定目标点。这种递阶模板的更换过程及其跟踪结果分别如图4所示。可见,模板更换及时、有效,目标识别准确,验证了本文算法的有效性。

图3 三幅由远及近的模板

图4 多模板递阶跟踪结果
实验算法运行的硬件环境为:工作频率为600 MHz的DM642处理器;32 MB的SDRAM; 4 MB的FLASH。采用C语言进行算法软件的开发。利用本文算法从模板图像中提取200个特征点并通过训练得到类条件概率的特征分类,然后经过大量的在线实时匹配实验,可以得到识别的成功率为88.6,目标识别与跟踪的速度为每帧19.8 ms,即50.5帧/s,而特征点数据总量为3 MB。可见,实验硬件满足算法要求,算法计算量较小、速度快、实时性好、鲁棒性强,满足实时目标识别与跟踪的需求。
5 结束语
本文提出了一种基于对不完全朴素贝叶斯分类器实时图像目标识别算法,并在成像自寻的导引系统中得到了实现与验证,实验平台效果直观,人机交互性好,开阔了学生的视野,有利于培养学生分析问题的能力。实验结果表明:该算法大幅降低了在线识别与跟踪阶段的计算量,具有很高的鲁棒性和实时性。
[1]Shen F,Wang H.Real time gray level corner detector [J].Pattern Recognition Letters,2002,23(8).
[2]Mikolajczyk K,Schmid C.Indexing based on scale invariant interest points[J].Proc.Eighth Conf.Computer Vision,2001:525_531.
[3]Lowe D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91_110.
[4]Lepetit V,Fua P.Keypoint recognition using randomized trees[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(9):1465_1479.
[5]Ozuysal M,Calonder M.Fast keypoint recognition using random ferns[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(3):448_461.
[6]付丽,孙红帆.基于贝叶斯分类器的图像分类技术[J].长春理工大学学报,2009,32(1):132_134.
[7]董立岩,苑森淼,刘光远.基于贝叶斯分类器的图像分类.吉林大学学报,2007,45(2):249_253.
[8]Zheng F,Webb G.A comparative study of semi-naive bayesmethods in classification learning[C]//Proceedings of the Fourth Australasian Data Mining Conference(Aus-DM05).Sudney:Ausdmos,2005:141_156.
[9]周志强,陈哲.贝叶斯景象匹配技术[J].北京航空航天大学学报,1999,25(3):337_341.
[10]周志强,汪渤.尺度不变特征在自寻的电视制导中的应用[J].电光与控制,2009(9):6_8.
EXperimental Research on Real-time Image Target Recognition Based on Bayesian Classifier
GAO Zhifeng,WANG Bo,ZHOU Zhiqiang
(School of Automation,Beijing Institute of Technology,Beijing 100081,China)
Based on the research of Semi-navie Bayesian classifier,a target recognition and tracking experimentalmethod using offline training and online identification has been presented.Thismethod converts featuresmatching problem between the template image and the target image into feature classification.It can run on the imaging homing guidance system.The experimental results show that the method can significantly reduce the computation of the online target recognition whilemaintaining high robustness,and have a high real-time performance.
image processing;Bayesian classifier;target recognition;experiment
TP391.41
A
10.3969/j.issn.1672_4550.2014.01.008
2013_03_19
高志峰(1979_),男,硕士,实验师,研究方向:导航制导与控制、图像处理等。
