神经网络预测PID控制在气化炉中的应用
2014-06-01张正刚丁维明
刘 晴 张正刚 丁维明
(东南大学能源与环境学院1,江苏 南京 210096;苏州紫兴纸业有限公司2,江苏 苏州 215011)
0 引言
整体煤气化联合循环(integrated gasification combined cycle,IGCC)是一种高效、清洁的能源利用方式[1]。气化炉系统是IGCC电站的核心部分,煤、氧气(或空气)和水蒸气在气化炉中经过一系列复杂的化学反应,转化成具有一定参数的煤气。煤气化过程具有高耦合、大滞后、非线性等特性[2],对这一过程进行有效控制一直是IGCC电站自动控制技术研究的核心和难点。
在有关气化炉控制技术的研究中,文献[3]提出的预测型PID控制方案结合了模型预测控制与PID控制的优点,以模型输出的预测偏差代替实际偏差,使PID控制器提前动作。该方案适用于具有大滞后特性的气化炉系统,且便于在现有的软硬件平台上实施。但该方案的预测输出依赖于系统的近似传递函数模型,降低了控制的精度,且不利于实际应用。针对这一问题,本文提出了一种基于神经网络的预测型PID控制。
1 预测模型与控制方案
人工神经网络(artificial neural network,NN)能够以任意精度逼近任意实际系统[4],且预测模型的建立不依赖对象的数学模型,可以直接对机组的运行数据进行采样和辨识。对于气化炉等机理建模非常复杂的对象,NN具有更高的实用性。本文欲建立气化炉对象的“预测模型”,即首先将被控对象看作黑箱,对系统的输入输出参数进行采样,用采样获得的数据训练神经网络,使网络能够根据k时刻之前的信息直接计算出气化炉在未来m时刻的输出y^(k+m|k)。
人工神经网络可以按结构划分为前向网络和递归网络。前向网络可以直接实现热工系统的静态建模。递归型神经网络通过内部的反馈结构保留以前时刻的输入信息,可以直接实现动态建模,但网络学习时间长,对训练样本的要求高。本文采用一种带外部时延结构的BP网络建立对象的预测模型,通过独立的时延模块存储过去时刻的输入量和输出量,并传递给神经网络的输入层[5]。
以单输入单输出系统为例,被控对象在k时刻的i步预测输出y^(k+i|k)不仅依赖于输入量,也依赖于(k+i)时刻之前的预测输出。这些预测输出本身是由输出量过去的测量值递归得到,因此可以找到一个输出量的表达式,它仅依赖于输出的测量值y(k),y(k-1),y(k-2),…,以及(k+i)时刻之前的输入值。因此,任意一个n阶系统的m步预测模型可以由一个多层前向网络实现,神经网络预测模型拓扑结构如图1所示。
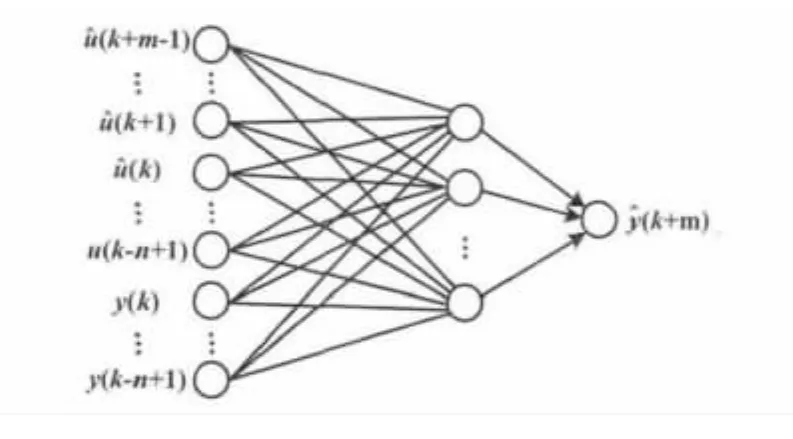
图1 神经网络预测模型拓扑结构Fig.1 The topology of the neural network predictive model
首先假设控制作用不变,即在未来m个采样时间内,u(k+i)=u(k),i=1,2,…,m,从而得到 k时刻时神经网络的输入向量,计算出对象的预测输出;然后根据设定值与预测输出的差,即预测偏差,作为主控制器的入口偏差。主控制器采用增量式PID结构,计算出下一时刻输入的变化量Δu(k+1),送入神经网络模型的输入端,进行下一轮运算,由此实现预测型PID控制。
与模型预测控制相同,控制回路应引入反馈校正环节,以防止模型失配[6]。本文使用两个神经网络同步工作,一个作为预测模型,如图1所示;另一个作为校正模型,输入向量为[u(k-1),u(k-2),…,u(k-n-m),y(k-m -1),…,y(k-m -n)],输出为y^(k)。以被控对象的输出y(k)与校正模型输出y^(k)的差,作为预测模型的预测偏差。校正模型与预测模型的网络结构完全相同,二者的不同功能由时延(time delay,TDL)模块实现。预测型PID控制系统方框图如图2所示。

图2 预测型PID控制系统方框图Fig.2 Block diagram of predictive-PID control system
2 输运床气化炉预测模型的建立
增压密相输运床气化炉实质上是一种快速循环流化床反应器,在高温高压条件下煤粉颗粒不完全燃烧产生满足一定参数条件的煤气。输运床气化炉的三个主要输入量为空气量、给煤量、水蒸气量;三个被控量为煤气热值、煤气压力和煤气温度。在某一工况(设为工况A)下,美国北达科他大学的试验用输运床气化炉对象的近似二阶传递函数模型如表1所示[7]。
采用神经网络对多输入各输出(MIMO)对象建模时,可将MIMO系统看作多个MISO系统分别建模。综合考虑建模的精度、神经网络的规模以及合理的预测时域,神经网络的采样时间取为30 s,压力及热值预测器取预测步长L=3,温度通道取L=4。
在额定工况点附近加入15%幅值的白噪声激励信号,取450组数据用于BP网络的学习,得到神经网络的权值矩阵;然后并联神经网络校正模型与气化炉模型,在线检测神经网络的泛化性能。
由于BP网络易陷入局部最小点,本文在网络学习过程中引入隐节点竞争算法[4]。算法原理是:计算出各隐层单元的误差后进行比较,具有最大δ值的神经元对应权矢量进行正常修正,其他神经元的权值都向最大单元的反方向修正,即各隐层单元的误差δj采用如下εj误差信号取代:

设定学习目标为样本的平方和误差小于0.2,获得满意的训练效果如图3所示。

图3 温度预测模型的学习结果Fig.3 The learning results of temperature predicting model
3 仿真试验
在Simulink平台上搭建模型,分别整定传统控制方案和预测型控制方案的PID参数。闭环响应曲线如图4所示,控制器参考结果如表2、表3所示。

图4 仿真结果对比Fig.4 Comparison of the simulation results

表2 分散PID控制方案的控制器参数Tab.2 Parameters of distributed PID controller

表3 预测型PID控制方案的控制器参数Tab.3 Parameters of predictive PID controller
4 结束语
本文以IGCC输运床气化炉为对象,以外置时延模块的BP神经网络作为预测模型,提出了一种基于神经网络模型的预测型 PID控制方案[8-11]。首先通过相对增益矩阵分析得到输入量与输出量的匹配关系,得到分散PID控制系统;然后将气化炉系统看作三个MISO系统,分别进行辨识建模,将预测模型串联至相应的 PID控制回路,重新整定 PID参数。基于Smulink平台的仿真表明,预测型PID控制响应速度快,超调量小,稳定时间短,具有良好的控制效果。
[1]林汝谋,金红光,蔡睿贤,等.整体煤气化联合循环系统研究方向与进展[J].燃气轮机技术,2002,15(2):15 -22.
[2]倪维斗,李政.煤的超清洁利用-多联产系统[J].节能与环保,2001(5):16-21.
[3]吕剑虹,吴科,赵亮,等.气化炉的预测型比例积分微分控制方法:中国,CN101329553[P].2008-12-24.
[4]魏海坤.神经网络结构设计的理论与方法[M].北京:国防工业出版社,2005.
[5]康支霞,张宪,马永光,等.循环流化床锅炉床温控制神经网络动态建模[J].锅炉技术,2006,37(S1):32 -35.
[6]王伟.广义预测控制理论及其应用[M].北京:科学出版社,1998.
[7]王新,吕剑虹,向文国.一种改进的子空间辨识方法在热工过程中的应用[J].中国电机工程学报,2010,30(32):96 -102.
[8]李佳.模糊自整定PID控制在过热气温控制系统中的研究与应用[D].哈尔滨:哈尔滨理工大学,2012.
[9]李晓丹.模糊 PID控制器的设计研究[D].天津:天津大学.2005.
[10]张魏.在线自调整模糊PID控制器的设计[J].自动化仪表,2000,21(3):12 -14.
[11]谢克明,牟昌华,谢刚.采用模糊PID控制的火电厂过热汽温串级控制[C]//第19届中国控制会议,2000:800-803.