市域铁路信号系统对折返线长度的要求探讨
2014-05-30彭传贤
彭传贤
(中铁第四勘察设计院集团有限公司通信信号研究设计处,武汉 430063)
市域铁路主要是为卫星新城、外围组团、远郊区进入中心城区的乘客提供公共交通服务的铁路客运系统。市域铁路信号系统的选择是根据线路的建设、运营、功能定位等确定,主要包括城市轨道交通ATC系统和国铁CTCS-2+ATO系统。
不同信号系统技术方案,对土建的要求也不尽相同,特别是对折返线及安全距离长度的要求差别较大,不合理的设计将会影响车站规模,进而造成建设成本增加。由于现有的CTCS-2列控系统的技术规范对折返线及安全距离的长度已有详细规定,本文着重研究市域铁路ATC系统的折返线及安全距离长度。
1 研究背景
1.1 规范要求
(1)《地铁设计规范》(GB 50157—2003)要求:“5.2.11折返线的有效长度,宜为远期列车长度加40 m(不含车挡长度)”[1]。
(2)《地铁设计规范》(GB 50157—2013)要求:“6.4.3∶7折返线、故障列车停车线有效长度(不含车挡长度)不应小于表1的规定”[2]。

表1 折返线、停车线长度
尽端式折返线长度=列车长度+安全距离。是道岔前基本轨接缝中心至车挡。因为停车误差和信号瞭望距离可以包括在安全距离内。
贯通式折返线长度=(列车长度+停车误差和信号瞭望距离(10 m))+安全距离。其中(列车长度+停车误差和信号瞭望距离(10 m))是两端基本轨接缝中心之间距离。
因此尽端式、贯通式折返线安全距离长度均为50 m。
1.2 存在的问题
(1)新旧规范的要求不同
虽然新旧规范安全距离长度的计算条件均为9号道岔,侧向35 km/h限速,但计算结论分别为40 m和50 m,将给工程设计、建设带来困惑。
(2)新版规范深入分析
①尽端式折返线原理如图1所示。
尽端式折返线长度=列车长度+安全距离。是道岔前基本轨接缝中心至车挡的距离。工程实际中,列车右端停车误差和信号瞭望距离可以包括在安全距离内,但列车左端停车误差、信号瞭望距离和计轴、信号机及应答器安装空间应该考虑,因此,尽端式折返线长度=道岔前基本轨接缝中心至车挡距离=列车长度+安全距离+左端停车误差和信号瞭望距离+计轴、信号机及应答器安装空间。
②贯通式折返线原理如图2所示。
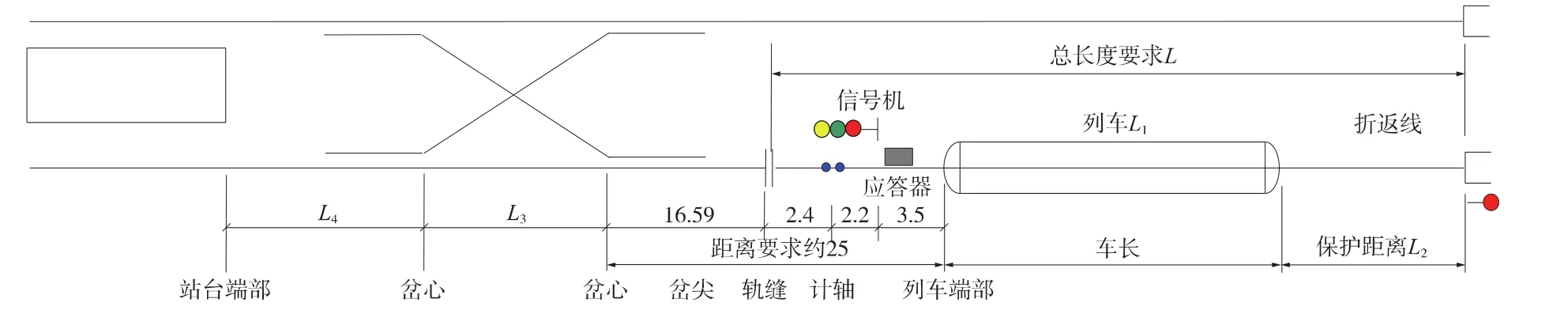
图1 尽端式折返线原理(单位:m)

图2 贯通式折返线原理(单位:m)
贯通式折返线长度=(列车长度+停车误差和信号瞭望距离(10 m))+安全距离。其中(列车长度+停车误差和信号瞭望距离(10 m))是两端基本轨接缝中心之间距离。但工程实际中,存在两点不同:一是两端基本轨接缝中心之间距离=列车长度+停车误差和信号瞭望距离+计轴、信号机及应答器安装空间;二是信号系统考虑安全距离时,应该是从右端信号机至车档的距离(含右端计轴、信号机及应答器安装空间)。
(3)适用的环境不同
《地铁设计规范》安全距离长度的确定均基于9号道岔,侧向通过速度为35 km/h计算确定,而市域铁路与城市轨道交通存在较大的差异,即列车为市域车辆(全长140 m)、12号道岔、侧向通过速度为45 km/h或50 km/h。安全距离应设置多长,尚无规范要求。
2 折返线及安全距离长度研究
2.1 信号系统安全制动关键因素分析
(1)安全制动模型
图3是安全距离示意,EB包络曲线是紧急制动曲线,EB触发曲线是紧急制动触发曲线,ATO曲线为一个具有恒定减速度的常用制动曲线。

图3 安全距离原理示意
图4是安全制动模型,描述了EB触发时,从超速发生直至EB以保证的减速率真正生效时最不利情况下的列车性能。包括下述部分:
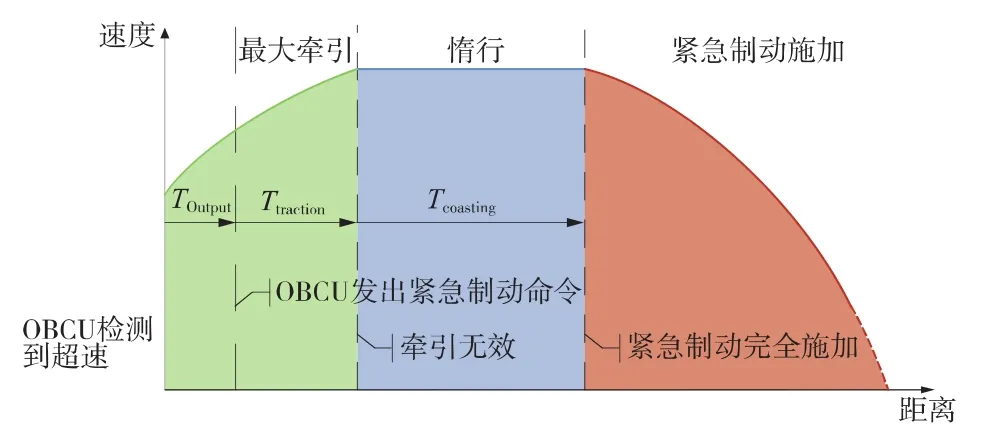
图4 安全制动模型
紧急制动输出所需的反应时间toutput;
解除列车牵引所需的反应时间ttraction;
建立保证的EB制动率所需的反应时间tcoasting。
(2)安全制动关键因素分析
①时间参数
安全制动模型时间参数主要包括了紧急制动输出所需的反应时间toutput,解除列车牵引所需的反应时间ttraction,建立保证的EB制动率所需的反应时间tcoasting3个关键参数。依据如下。
CBTC 车载设备的反应时间为 0.07 ~0.75 s[3];
车载信号设备自接收地面信息至完成处理的时间应不大于 2 s[4];
控制命令的反应时间,即命令发出至被控系统开始执行的时间应小于或等于1 s[5]。
结合安全制动模型,考虑最不利因素,toutput为车载子系统的反应时间,取0.75 s;解除列车牵引所需的反应时间ttraction应该为车载设备紧急制动输出后至开始建立EB前,取1-0.75 s=0.25 s;因为车载设备从接收到信息到完成处理不大于2 s,因此tcoasting取2 s-1 s=1 s。
②速度参数
根据图3,安全制动模型涉及3个速度值,分别为ATO速度Vo、EB触发速度Vc及EB建立时的速度Ve。具体速度要根据线路条件、道岔类型等综合决定。市域铁路12号道岔过岔速度按固定辙岔45 km/h、可动心50 km/h计算,通过站台区时按60 km/h控制。
③加速度参数
根据图4,安全制动模型涉及最大牵引加速度gmax;最大常用制动减速度gmin;EB减速度ge;实际在计算安全距离长度时,将涉及到紧急制动保障率ga,其是决定安全距离长度的关键参数之一,由粘着系数、最高列车运行速度、列车偏重以及一节车辆失去制动所组成的“最不利条件”计算产生。
2.2 尽端式折返线及安全距离长度计算
本节以“专线4249”12号道岔,5 m线间距的交叉渡线为例,对尽端式折返线进行计算分析,具体配线形式如图1所示。
(1)站台端部至道岔岔心长度L4,可由以下距离构成[2]。
站台端-出站信号机距离:一般为3.5~5.0 m。可取值为3.5 m;出站信号机-计轴器磁头距离:B型车为2.2 m;计轴器磁头-道岔基本轨缝中心距离:为2.4 m;列车停车误差,已经在站台有效长度内包含,不再另加;
以上合计为 3.5 m+2.2 m+2.4 m=8.1 m。
结论:道岔中心至站台端距离8.1 m+16.59 m=24.69 m,取值为 L4=25.0 m。
(2)根据“专线4249”道岔图,12号道岔5 m线间距时L3=60 m。
(3)列车运行场景如下描述:
列车从站台启动,以最大牵引加速度运行,加速到线路允许的最大速度或者是能保证列车在停车点停车的最大速度:Vmax=Vo;
列车按最大常用制动开始制动,刚好能保证列车停在停车点,运行的距离为D2;
若建立最大常用制动时失败,列车速度达到EB触发速度Vc;
列车建立EB,速度达到Ve,此时最不利条件产生,EB仅能保证紧急制动保障率;
列车冲出停车点,在安全距离内停车。
(4)数学计算
①假设列车达到Vo时运行距离为D1,然后列车按(3)场景运行D2距离至停车点停车。其中列车运行D2分两阶段,一阶段是最大常用制动建立过程中列车运行的距离,最大常用制动建立过程总时间为2 s,考虑常用制动建立过程中,列车速度尚未达到EB触发速度,为简化计算,可认为此阶段列车速度恒定为Vo;另一阶段为最大常用制动作用期间列车运行的距离,则
市域铁路


市域铁路

将式(2)、式(4)代入式(1)得

将式(5)代入式(3)得

将式(7)代入式(6),得

求解式(8),得 Vo=14 m/s(50.4 km/h),从而可计算出:

②若继续场景(3),最大常用制动建立失败,EB建立,但仅能保证紧急制动保障率,EB触发速度Vc=Vo+gmax×0.75;解除牵引到开始建立 EB,Ve=Vc+gmax×0.25;惰行时间为1 s;EB建立后仅能保证紧急制动保障率ga,当动拖比为2时,取最不利条件下的值 0.78 m/s2,则

分别带入上式
(5)上述分析中ga选取的是地铁车辆的参数。市域铁路车辆的ga最不利条件下,为0.75 m/s2,则L2=47.7 m。考虑市域车辆平均启动加速度gmax取0.8 m/s2带来的误差;常用制动过程中,为简化计算,取恒定速度Vo带来的误差;时间参数的分配也是一种理想的分配,也将产生误差等,为弥补误差,将47.7 m放宽至50 m更为合适。则市域铁路尽端式折返线的长度为轨缝至车档的长度:L=左端计轴、信号机及应答器安装空间5 m+瞭望距离(3.5 m-5 m)+车长+安全距离50 m。
(6)若计算侧向行车尽端式折返线长度,计算方法与(4)相同,需要考虑的是道岔的过岔速度限制,市域铁路12号道岔过岔速度按固定辙岔45 km/h、可动心50 km/h计算。此时需要以此限速为EB建立的速度Ve,反算Vc、Vo,再计算折返线及安全距离长度,本文不再详细计算。
2.3 贯通式折返线及安全距离长度计算数学模型
针对图2的贯通式折返线,道岔设置为4249型12号道岔,其折返线及安全距离长度计算方法与2.2所述相同,除了需要考虑道岔的过岔速度控制外,还需考虑两端的计轴、信号机及应答器安装空间及瞭望距离对总长度的影响。因为图2右端的计轴、信号机及应答器安装空间可包含在安全距离内,所以贯通式折返线长度为前道岔轨缝至车档的距离:L=左端轨旁设备安装空间5 m+左端瞭望距离5 m+车长+右端瞭望距离5 m+安全距离50 m。
3 结论
通过分析城市轨道交通折返线及安全距离长度的相关要求,根据市域铁路与地铁不同的特点,基于安全制动模型,分析关键因素,建立了市域铁路折返线及安全距离长度计算的方法,并进行了典型分析。在市域铁路大规模兴建之际,对指导工程设计及节省工程投资具有积极意义。
[1]GB 50157—2003 地铁设计规范[S].
[2]GB 50157—2013 地铁设计规范[S].
[3]IEEE 1474.1 IEEE standard for Communications-Based Train Control(CBTC)performance and functional requirements[S].
[4]周宇冠.关于市域快速轨道交通的思考[J].铁道标准设计,2012(9):22-26.
[5]GB/T12758—2004 城市轨道交通信号系统通用技术条件[S].
[6]中国交通运输协会城市轨道交通委员会文件2013[10]号,城市轨道交通CBTC信号系统行业技术规范-需求规范[S].
