公路客车横向加速度实验研究
2014-05-25邵毅明
徐 进, 杨 奎, 罗 庆, 邵毅明
(1.重庆交通大学山地城市交通系统与安全重庆市重点实验室,重庆 400074;2.中铁二院工程集团有限责任公司,四川成都 610031;3.西南交通大学交通运输与物流学院,四川成都 610031)
我国上一次对汽车横向加速度开展大规模调查是在2002年,但10余年来我国公路上行驶车辆的动力性能和驾驶人构成发生了巨大变化,有必要重新分析当前的汽车横向加速度特性.研究汽车横向加速度ay对于道路工程设计具有以下意义:
(1)对ay进行换算可以得到汽车行驶时的横向力系数,不仅可以据此对公路路面设计和路表特性提出要求[1],还可以评估平曲线超高率的合理性,从而控制超高率的取值范围[2];
(2)ay与汽车横向稳定性密切相关,因此,通过ay可以深入研究驾驶人曲线行驶时的轨迹-速度选取行为,从而为复杂道路的轨迹-速度预测提供基本参数[3];
(3)ay是横向舒适性最直接的衡量标准[4],建立ay与线形参数的关系模型,可以预测公路设计方案的舒适性水平,进而有针对性地改进设计,最终提高公路行驶质量.
学者们从多个角度开展了横向加速度的相关研究工作.文献[5]根据立交匝道、城市快速路环线和山区公路的小客车ay实测数据,建立了ay与弯道半径之间的关系模型,但由于公路调查样本仅有一条,研究结果具有局限性.文献[6]在一段山区公路上调查了16个弯道的小客车运动学行为,其中包括ay分布特征,但关注重点是车辆导航系统对驾驶行为的影响.文献[7]使用车载滚球式斜度指示计,分析典型小客车在公路上的横向运行特性,分析结果表明指示计读数与汽车横向加速度高度正相关,而与车身侧倾角负相关.文献[8]调查了55个平曲线路段的汽车行驶特性,其中横向力系数的调查结果表明,使用美国94版道路几何设计规范中的超高设计方法无法提供一致性的设计.美国道路设计规范(在2004年之前)中的横向力系数推荐值来源于20世纪30~40年代的试验结果,但此后的汽车技术发生了巨大变化,为此,文献[9]在3组弯道上开展了不同年龄不同性别驾驶员的小客车行驶试验,得到了驾驶员感觉不舒适时的临界行驶速度和临界横向加速度,及其特征分位值.
和松等在专用试验路上测量了不同行驶速度条件下的路面横向力系数,得到了横向力系数与测试速度之间的回归模型[10].潘晓东等在一条山区公路上测试了心率增加数和血压增加数数据,建立了以横向力系数为自变量的驾驶负荷模型[11].交通部公路所在2002年调查了小客车、大客车和货车的横向力系数,得到了横向力系数随行驶速度的变化曲线[12],并加入到2003版的《公路工程技术标准》中,为公路平曲线超高和最小极限半径的取值控制提供依据.但10余年来我国公路上的交通组成已经发生了巨大变化,特点是货车和大客车的比重显著下降,小客车比重急剧增加并且驾驶员的构成更加丰富,例如,私家车驾驶员的比例过去以忽略,现在开始占主导,驾驶员驾龄、性别和年龄的分布更加分散和随机.在车辆性能方面,加速性、制动性、操纵性有了极大的改善,小客车和大客车可以达到更高的速度,货车的载重吨位一直在稳步增加.基于以上因素,驾驶人操控车辆所表现出来的行驶特性必然发生变化,横向加速度作为一个重要行驶特性也发生了变化.因此,为了给新形势下的公路设计提供指导,有必要对当前公路上的汽车横向加速度进行大规模的调查和分析.
笔者在四川省测量了各类公路上的汽车横向加速度,根据实测数据,研究了横向加速度的分布特征,分析了横向加速度随行驶速度和轨迹半径的变化关系,以及地形环境、公路技术等级和类型对这种关系的影响规律.
1 横向加速度数据采集试验设计
本文采用单车连续测量方法采集汽车行驶响应参数.具体的试验设计如下.
1.1 试验道路
选取12条有代表性的公路进行分析,试验公路涵盖了不同设计等级、不同地形环境和不同车道数.表1是这些公路的主要技术特性.表1中,vd为公路的设计速度,WR为路面宽度,WS为路肩宽度,NL为车道数.
1.2 车辆类型
小客车、大客车和货车是公路上最具代表性的3种车型,小客车的比重最大,一般在60% ~70%以上;其次是货车(旅游公路大客车比例略高于货车).笔者测量了足够样本量的小客车和大客车行驶特性数据,本文给出的是小客车和大客车的测试结果.
1.3 试验驾驶员
大客车驾驶员为运输公司的职业驾驶员,测速人员以普通乘客的身份买票搭乘.小客车驾驶员有3种:第1种是职业的出租车驾驶员;第2种是未办理营运牌照的驾驶员,此类驾驶员的比重非常大(特别是乡村公路),必须加以考虑;第3种是私家车驾驶员,与前两种相比其累计行驶里程短、驾驶技术较为逊色,但由于近些年来私家车数量的急速膨胀,也需重点考虑.表2是试验驾驶员的一些特征数据.

表1 试验道路的主要技术参数Tab.1 Main technical parameters of test roads

表2 试验驾驶员的基本特性Tab.2 Basic characteristics of driver volunteers
1.4 测量方法以及误差分析
用微型惯性航姿测量系统采集行驶车辆的横向加速度.传感器安装在车厢底板的中间位置.用非接触式测速仪采集汽车的连续行驶速度,该装置固定在车头或车尾;用手持式双频高精度GPS记录汽车的行驶轨迹.
在所用测试仪器中,非接触式测速仪的分辨率为0.1 km/h,本文测试的公路行驶速度范围为10~150 km/h,分辨率0.1 km/h能够保证速度测试的相对误差小于1%(绝大多数低于0.5%).惯性航姿系统的横向加速度分辨率为0.02 m/s2,误差±10%,汽车横向加速度的范围为0.2~8 m/s2,因此,测试数据的最大相对误差≤2%.手持式高精度GPS接收机的单点定位精度为2 m,经过差分技术改正后的精度为30 cm,本文使用GPS接收机测试汽车行驶轨迹,而公路行车过程中驾驶人是在4~7 m的可使用路幅宽度内选择行驶轨迹,因此,轨迹数据的横向位置误差小于5%.在道路实测试验时,正式采集数据前均进行10~30 min的预测试,以消除系统误差.
1.5 数据提取
惯性航姿系统、非接触式测速仪以及GPS的输出数据都包含时间序列,精度为毫秒,在测试时用一个三通道数据采集卡与一台便携式计算机相连,并向其写入数据,由于都包含时间序列,很容易实现三种数据之间的同步.
以一段山区公路为例,说明了数据的提取和配对方法,如图1和图2所示.

图1 一段山区公路行驶轨迹Fig.1 Vehicle trajectory on a road section in mountainous areas

图2 采集数据的输出与提取Fig.2 Text data output and extraction
图1是GPS输出的行驶轨迹.图2第1幅是航姿系统输出的横向加速度,第2幅是对轨迹坐标数据进行差分算得的轨迹曲率,第3幅是非接触式测速仪输出的连续行驶速度.沿曲线行驶时,汽车横向加速度都会经历先升后降的时变过程,峰值通常是在汽车驶经曲线中曲率较大位置附近时出现,由于行驶稳定性在横向加速度达到峰值时最差,因此,选取峰值横向加速度进行分析.
本文设计了曲线尖峰提取算法,输入横向加速度曲线后,自动输出每个尖峰的时间序列值ti、加速度峰值ayi和相应的里程值Li,然后根据ti和Li找出与ayi对应的轨迹曲率Ki和行驶速度vi,再将数据保存成(i,ayi,Ki,vi,Li)格式.根据整理后的数据可以绘制成ay-K散点图和ay-v散点图,以便统计分析.
2 横向加速度分布特性
图3是12条试验公路的测试结果.图3(a)是六车道公路的ay分布,这3条道路均位于成都平原,线形标准高,行驶环境基本相同,因此,横向加速度分布范围接近.
根据文献[13],当以横向加速度为行车舒适性评价标准时,感觉舒适、比较舒适和不舒适的阈值分别为 1.8、3.6 和 5.0 m/s2.图 3(a)中 90% 以上的数据点位于舒适性界限之内,因此,可以认为在平缓地形六车道公路上的旅行是舒适的.就同一条公路而言,小客车的横向加速度分布略高于大客车,这是因为小客车可以达到更高的行驶速度.
图3(b)是3条四车道高速公路的ay分布,从图中可以看到公路所穿越的地形越起伏,ay的分布区间更高,位于成都平原上的成彭高速,绝大部分ay值都低于舒适阈值;位于川中丘陵的成绵高速低于舒适阈值的数据点比例在85%左右,并开始有个别数据点超出较舒适阈值;而穿越龙泉山的成渝高速成简段超出较舒适阈值的数据点进一步增加,符合舒适性要求的数据点比例不足85%,这表明山岭区四车道高速公路的一些路段无法满足行驶舒适性要求.
图3(c)是双车道公路的ay分布,从图中能看到ay的幅值更高并且受地形条件的影响更大,位于平原的S106和位于丘陵区的赵镇-淮口公路都满足较舒适标准;跨越龙泉山的G318开始有一部分数据点超出了较舒适阈值,但绝大部分数据点仍低于不舒适阈值;位于高山区的G108、G213和昭化-大朝公路超出较舒适阈值的数据点进一步增加,并有少量的数据点在不舒适性阈值之上.这表明山区公路的行驶舒适性明显降低,特别是当设计速度低于30 km/h(后3条公路)时,至少有15%左右的路段其行驶过程是比较不舒适的,甚至个别路段是舒适性极差.同时,图3(c)中后3条公路的最大横向加速度值均超过7 m/s2,其中昭化-大朝公路的最大实测值甚至超过8 m/s2,换算成横向力系数为0.8,这是路面附着性能的极限状态.

图3 试验公路上的横向加速度分布Fig.3 Lateral acceleration distribution of test roads
图4是根据车道数前述12条公路的ay数据点进行分类汇总的结果,图中密集的数据点连成了非常平滑的S形曲线,曲线拐点约在90~92分位左右,并不是之前所认为的85分位,因此,需重新评价85分位的实用意义.
从图4可见,六车道和双车道公路的小客车ay分布略高于大客车,这是由于在六车道公路上小客车能够自由超车,行驶速度较快;双车道公路车流量较低时,车辆同样能自由行驶.当穿越山岭地形时,急弯陡坡频繁出现,小客车由于动力强劲在行驶速度上有较大的优势,因此曲线行驶时的ay一般较高.而四车道公路上小客车和大客车的分布曲线是交叉的,在50分位以前小客车略低于大客车,之后又略高于大客车,这是由于四车道公路同一行驶方向仅有两个车道,车流量较大时,小客车很容易被前方的慢行车辆阻滞,并且与大客车相比其被阻滞的机率更大.
表3给出了汽车在3种类型道路上的ay特征分位值,可为道路几何设计和车辆智能速度控制算法设计提供参数标定依据.从表3中可见,只有双车道公路的85和90分位值大于2 m/s2,其余都小于该值.

图4 每种类型公路的横向加速度分布Fig.4 Lateral acceleration distribution of different kinds of test roads

表3 横向加速度特征分位值Tab.3 Percentile values of lateral acceleration distribution m/s2
3 轨迹半径对横向加速度的影响规律
横向加速度是汽车曲线行驶时产生的,在公路上行驶时驾驶人有很大余地来选择轨迹,因此,不同的驾驶行为会导致不同的轨迹曲率,进而导致不同的横向加速度.本节将分析轨迹曲率特性对横向加速度的影响.
图5(a)是一辆小客车的ay-K散点图,K为轨迹曲率.对于道路设计者,轨迹半径r(r=1/K)要比曲率更直观.根据曲率与半径之间的关系,可将ay-K散点图转换成规律性显著的 ay-r散点图(图5(b)).
由图5(b)可见,轨迹半径越大,横向加速度越小.ay与r之间的负相关关系的原因是:当r增大时,驾驶人会选择更高的速度,如果车辆失控,事故后果与低速行驶时相比会更严重,因此,驾驶人为了行车安全会选择较小的ay,从而预留出较大的安全余地.
图6是将试验数据按试验车型整理汇总后的结果,在此,针对每一组数据都分别建立均值模型ayave-r和极值模型aymax-r,其中,均值模型是用统计回归方法得到的,极值模型是数据的上包络线.均值模型的物理意义是驾驶行为的平均水平,而极值模型可用来表示驾驶行为的上界.
图6右侧3幅图分别是3类公路的ay-r模型曲线.将均值模型曲线和极值模型曲线所围成的部分称为包络区域,六车道公路小客车的包络区域与大客车的包络区域是分离的;四车道公路二者的包络区域在轨迹半径小于1 km时轻微重叠;双车道公路二者的包络区域在很大范围内有明显的交叉.
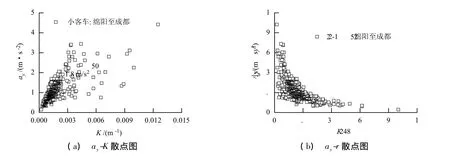
图5 横向加速度与轨迹曲率半径之间的关系Fig.5 Relationship between lateral acceleration and curve radius
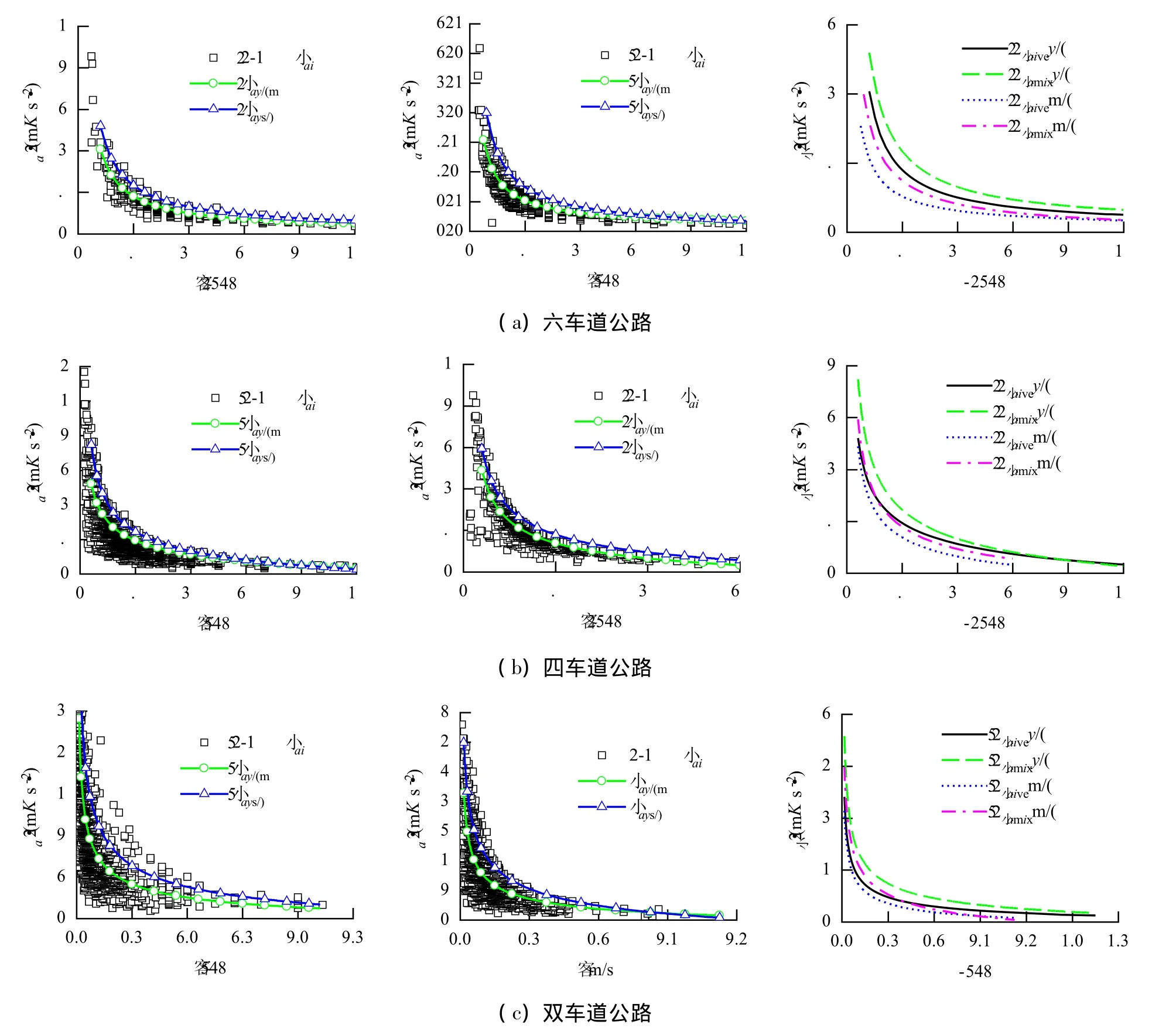
图6 按车型整理后的ay-r散点图以及ay-r模型曲线Fig.6 ay-r scatter diagram of different vehicle types and profiles of ay-r model
表4按公路类型给出了横向加速度极值模型 和均值模型的函数形式、模型系数以及均值模型的拟合精度R2.
表4表中的均值模型可以用于道路设计时几何参数的一般值控制,极值模型可用于道路几何参数的极限值控制.
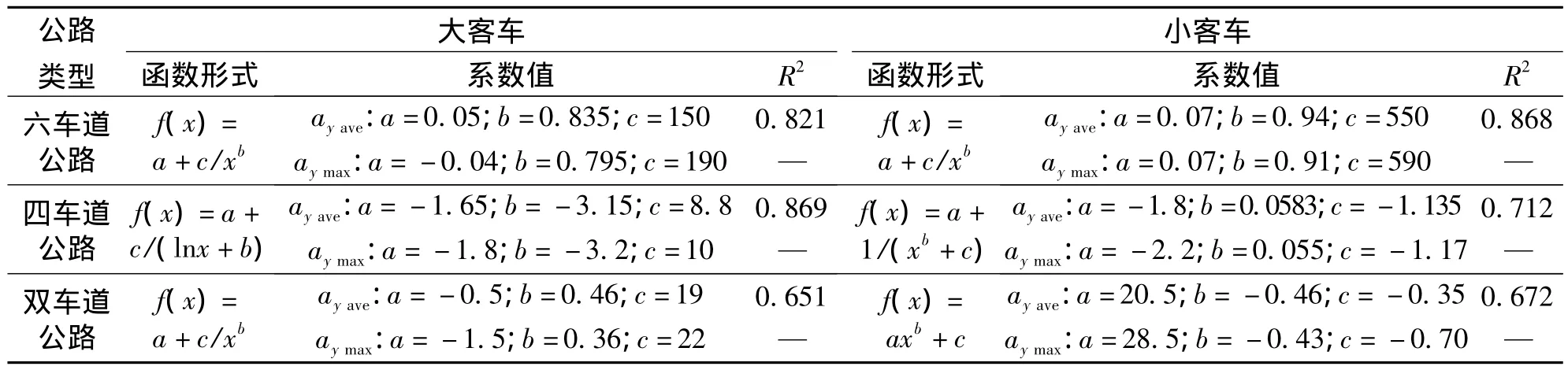
表4 ay-r模型表达式以及模型系数Tab.4 ay-r model formula and coefficient
4 行驶速度对横向加速度的影响规律

图7 每种类型公路的ay-v散点图Fig.7 ay-v scatter diagram of different kinds of test roads
横向加速度是曲线行驶时驾驶人选择某个行驶速度后的结果,因此,有要分析二者之间的相关性.图7是3种类型公路的ay-v散点图.六车道公路两种车型的数据点均成团状分布,看不出ay与v之间的相关性.在四车道公路行驶时,小客车的数据分布区间涵盖了大客车,其最高速度vmax与六车道公路接近,但最低速度明显低于六车道公路;同时,数据分布区域形态呈现出较强的规则性.双车道公路上的数据分布特征与四车道公路相似,差别仅在于前者的分布区间更低.
将全部的ay-v数据点按车型进行分类汇总,如图8(a),能看到数据分布呈现显著规律性,图8的3条线基本勾勒出了数据分布区域的轮廓特征.以10 km/h的整数间隔来划分速度区段,然后统计落在每一速度区段的ay特征分位值,包括最小值aymin、最大值 aymax、50 分位值 ay50、85 分位值 ay85和算数平均值ayave,如图8(b)所示,除了最小值之外,其余4条折线都是随行驶速度的增大而下降的.对图8(b)中的每组特征值进行一元回归,可以看出,对于ay85、ay50和ayave这3组数据,两种车型的趋势线具有不同的形状特征,小客车的趋势线为凹形,而大客车的趋势线微凸.
对于公路设计,横向加速度均值可用于计算几何参数的一般值,85分位值可用于计算几何参数的极限值.
公路上行驶车辆存在多种类型,对几何参数取值时必须兼顾多种车型的行驶特性,在本文两种车型的同一种趋势线所包围的区域内选取横向加速度,能够兼顾小客车和大客车,即小客车ayave趋势线和大客车ayave趋势线所包围的区域可用于公路几何要素一般值的计算,小客车ay85趋势线和大客车ay85趋势线所包围的区域可用于极限值的计算,如图8(c)所示.
由于小客车和大客车趋势线所围成的包络区间成不规则的喇叭状,而绘制一条从包络区域中间穿过的直线则可以更简明的表示横向加速度与速度的负相关关系,使用和计算更方便,称这两条线分别为ay85折中线和ayave折中线.

图8 按车型整理后的ay-v散点图Fig.8 ay-v scatter diagram of different vehicle types
5 结论
(1)根据ay实测结果,在六车道公路和平缓地形四车道公路上行驶是舒适的;在起伏地形四车道公路上行驶是比较舒适的;对于双车道公路,设计速度vd越低舒适性越差,vd小于30 km/h时,部分路段的行驶是极其不舒适的(即让人难以忍受).
(2)ay累积频率曲线的拐点在90~92分位左右,并不是之前认为的85分位;此外,双车道公路的最大横向加速度超过了8 m/s2.
(3)ay与汽车行驶轨迹曲率半径负相关,并且即轨迹越缓和,ay分布越集中;就公路类型而言,车道数增加时,ay分布趋向于集中;在车型方面,大客车的数据点分布要比小客车更集中.
(4)建立了不同公路类型、不同车型的ay-r关系模型,包括均值模型和极限值模型,其中均值模型用于控制公路几何要素的一般值;极限值模型用于控制几何要素的极大值和极小值.
(5)建立了大客车和小客车85分位值和均值的ay-v回归模型,获得了两种车型均值曲线及两种车型85分位曲线形成的包络区间,可以分别为公路几何要素的一般值和极限值控制提供依据.
致谢:同济大学道路与交通工程教育部重点实验室开放基金资助项目(K201201).
[1]李雪平,曹德洪,祝学成,等.高速公路沥青混凝土路面抗滑磨耗层的选择[J].公路,2010(9):1-5.
LI Xueping,CAO Dehong,ZHU Xuecheng,et al.Choice of skid-resistant wearing course on expressway asphalt concrete pavement[J].Highway,2010(9):1-5.
[2]邵毅明,谭丹萍,束海波,等.公路平曲线超高/反超高对车辆操纵的影响[J].交通科学与工程,2010,26(1):79-84.
SHAO Yiming,TAN Danping,SHU Haibo,et al.The effect of superelevation/reverse superelevation on vehicle steering control[J]. Journal of Transport Science and Engineering,2010,26(1):79-84.
[3]徐进,罗庆,毛嘉川,等.轨迹-速度协同控制的山区公路平面线形设计方法法[J].中国公路学报,2013,26(4):43-56.
XU Jin,LUO Qing,MAO Jiachuan,et al.Method for horizontal geometry design of mountainous roads based on trajectory-speed cooperative control[J]. China Journal of Highway and Transport,2013,26(4):43-56.
[4]朱亮亮,李向国,李木松.高速公路平竖曲线组合行车舒适性研究[J].石家庄铁道大学学报:自然科学版,2010,23(3):68-72.
ZHU Liangliang,LI Xiangguo,LI Musong.Research on riding comfort of highway combining plane and vertical curve[J].Journal of Shijiazhuang Tiedao University:Natural Science,2010,23(3):68-72.
[5]HUGEMANN W,NICKE M.Longitudinal and lateral accelerations in normaldaydriving[C]∥ ITAI Conference.Croydon:The Institute of Traffic Accident Investigators,2003:1-8.
[6]TOKUNAGA R A,ASANO M,MUNEHIRO K,et al.Effects of curve designs and road conditions on driver's curve sharpness judgment and driving behavior[J].Journal of the Eastern Asia Society for Transportation Studies,2005(6):3536-3550.
[7]CARLSON P,MASON J.Relationships between ball bank indicator readings,lateral acceleration rates,and vehicular body-roll rates[J].Journal of Transportation Research Record,1999,1658:34-42.
[8]BONNESON J.Superelevation distribution methods and transition designs,NCHRP report 439[R].Washington D.C.:Transportation Research Board,2000.
[9]TAN C. An investigation of comfortable lateral acceleration on horizontal curves[D].University Park:Pennsylvania State University,2003.
[10]和松,常成利,钱敬之.路面横向力系数速度修正试验研究[J].公路交通科技,2005,22(6):54-56.
HE Song,CHANG Chengli,QIAN Jingzhi.Study on correction of sideway force coefficient by measured speed[J].JournalofHighway and Transportation Research and Development,2005,22(6):54-56.
[11]潘晓东,林涛,杨轸.驾驶员心率血压与山区公路横向力系数关系[J].同济大学学报:自然科学版,2006,34(6):748-751.
PAN Xiaodong,LIN Tao,YANG Zhen.Relationship between the variation of drivers'heart rate and systolic blood pressure and the coefficient of transverse force of mountainous highways[J]. Journal of Tongji University:Natural Science,2006,34(6):748-751.
[12]中华人民共和国交通部.JTGB 01—2003公路工程技术标准[S].北京:人民交通出版社,2004.
[13]彭志群.道路平面线形舒适性评价方法研究[D].西安:长安大学,2005.