永磁同步电机的变结构MRAS转速辨识系统
2014-05-25杜永栋滕青芳左瑜君
杜永栋 滕青芳 左瑜君
(兰州交通大学自动化与电气工程学院,甘肃 兰州 730070)
永磁同步电机的变结构MRAS转速辨识系统
杜永栋 滕青芳 左瑜君
(兰州交通大学自动化与电气工程学院,甘肃 兰州 730070)
为改善模型参考自适应系统(MRAS)速度观测器在永磁同步电机控制中对参数变化和负载扰动较敏感的问题,提出一种变结构MRAS转速辨识方法。该方法利用滑模变结构代替MRAS的自适应律,利用双曲正切函数Sigmoid代替符号切换函数,以降低滑模模态的抖动。理论分析和仿真结果表明,基于变结构MRAS观测器的永磁同步电机无速度传感器控制系统具有较好的动静态性能和较强的鲁棒性。
永磁同步电机 无速度传感器 变结构 模型参考自适应 转速辨识
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有体积小、效率高和功率密度高等特点,广泛应用于生产领域。PMSM的准确控制,需要通过电机转子速度和位置信息实现。位置或速度传感器的安装使PMSM成本增加、体积增大、系统可靠性及鲁棒性降低。因此,在交流传动中无速度传感器的PMSM具有很高的研究和实用价值,对此国内外专家提出了很多方法[1-10]。文献[1]~[2]提出一种高频注入法,该方法具有高频噪声。文献[3]~[6]提出模型参考自适应法(model reference adaptive system, MRAS),该方法对PMSM参数变化敏感。滑模变结构控制是非线性的鲁棒控制[7-8],当系统稳定在滑模面时,系统状态不受原有参数变化和外部扰动的影响。文献[9]~[10]将变结构引入到MRAS的感应电机无速度传感器中。
为解决PMSM中MRAS对参数敏感的问题,本文提出变结构MRAS转速辨识法,选用PMSM本体为参考模型,可调模型选用PMSM定子电流模型,利用两种模型输出的差构造滑模面S,以解决MRAS对PMSM参数敏感的问题。通过Matlab仿真,证明变结构MRAS转速辨识方法在PMSM无速度传感器直接转矩控制系统中具有较强的鲁棒性和较好的动静态性能。
1 基于模型参考自适应的速度观测器
1.1 PMSM数学模型
在转子磁场定向的旋转坐标系dq中,PMSM定子电流的数学模型为[11]:
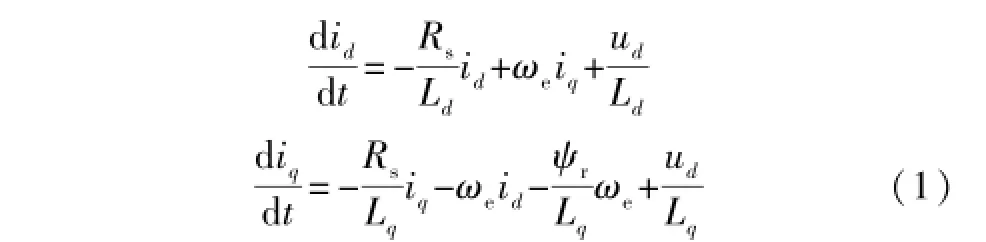
式中:id、iq、ud、uq为dq轴系下定子电流分量和电压分量;Ld、Lq为dq轴定子绕组电感;Rs为定子绕组电阻;ψr为转子永磁体磁链;θe、ωe为转子电气位置角和电气角速度。
1.2 传统MRAS转速辨识
式(1)中含有待估转子速度,参考模型选择电机本体,可调模型选择定子电流,采用并联型结构辨识电机速度。为便于分析,式(1)可表示成如下的矩阵形式:

令:
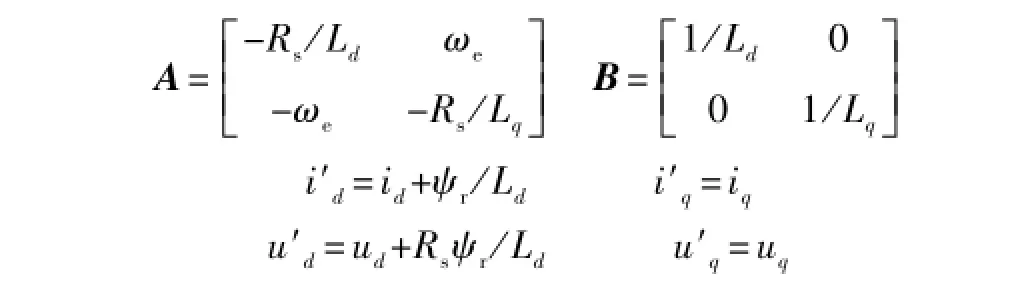
则有:

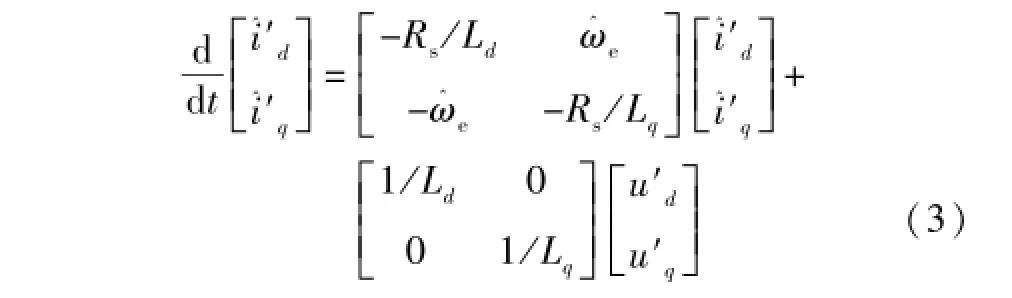
可调模型可表示为:

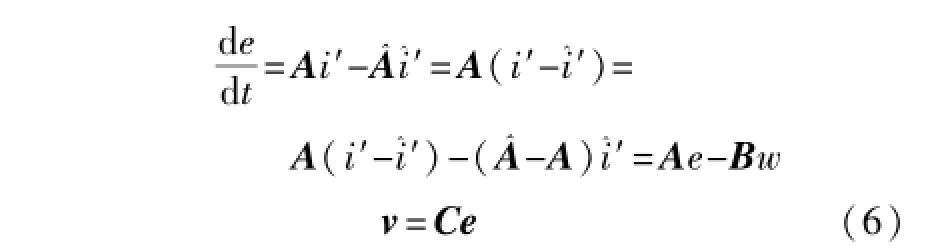
定义状态误差为:

由以上公式可得状态误差方程为:
根据POPOV超稳定理论,线性时不变前馈传函H(s)=C(sI-A)-1为严格正实,非线性时变环节满足POPOV不等式,即:

当C=I、v=e时,则有:


对式(10),可以取:

对式(13)两边求导,得:

根据上面选择的PI自适应律,可以保证η(t0,t1)≥-γ2成立,可得PMSM的速度辨识算法为:
2 变结构MRAS转速辨识设计
2.1 滑模变结构的原理
反馈量u(x)的极性及大小,是根据输入量S(x)的状态满足切换函数值时而发生改变,从而让控制器从一种结构切换到另一种结构,以满足所需的控制性能要求。其一般形式为:

式中:u+(x)≠u-(x);S(x)=0为切换超平面,将保证最终滑动模态的动态品质及稳定性作为选择标准。
2.2 变结构MRAS速度观测器设计
变结构MRAS观测器是利用变结构的思想找到等效的转速ωe,使受到不确定及随机因素影响的系统实际转速能够跟踪给定转速,即:

2.2.1 设计滑模面
设计滑模面S(x),使得所决定的滑动模态能够逐步趋于稳定,并且具有优良的动态性能。本文构造的滑模面为:

2.2.2 控制律的设计
常值切换控制、比例切换控制、函数切换控制是常用的滑模变结构控制的设计方法。一般选用常值切换控制u=u0sgn[S(x)],其中,u0为待求的常数,sgn()为符号函数。

滑模变结构是因为不连续的开关特性而引起控制系统的抖振,抖振会降低性能指标的精度,增加系统的能量消耗,破坏系统的性能。因此,可在滑动模态控制中引入准滑动模态,较传统滑模速度观测器,采用双曲正切函数Sigmoid代替符号切换函数,可以降低系统的抖振,减少了相位延迟环节。
变结构MRAS速度观测器估计转速为:

2.2.3 稳定性分析
滑模变结构控制由趋近运动及滑模运动两个部分组成,其中趋近运动需要满足滑模存在性和可达性条件,即满足广义滑动模态的存在条件。
由式(19),式(21)可表示为:

式中:f1为有上界的函数,其中含有电机本体参数、电气角速度、估计电流和参考电流。

式中:f2>0;SH(S)>0。
所以存在足够大的滑模增益k使Sf1-SkH(S)f2<0,即SkH(S)f2>Sf1时,S<0,从而保证速度观测器的稳定性。变结构MRAS的速度辨识框图如图1所示。
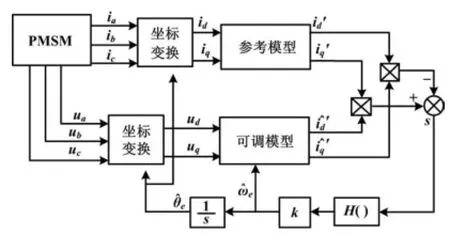
图1 变结构MRAS速度观测器Fig.1 Variable structure MRAS rotate speed observer
3 仿真研究
为验证设计的滑模变结构MRAS速度观测器的可行性和有效性,选择表面式PMSM,n=2 000 r/min,Ld=Lq=0.000 835 H,Rs=2.875 Ω,ψr=0.175 Wb,J= 0.000 8 kg·m2,p=4为电机的额定参数。模块选择Matlab中电气库SimPowerSystems自带的电机模块PMSM。
仿真研究利用Simulink进行控制系统设计,DTC策略控制系统如图2所示。系统转速控制器采用传统PI控制,磁链和转矩控制采用滞环比较器,观测器分别采用传统MRAS和变结构MRAS进行仿真,对仿真结果进行比较、分析。
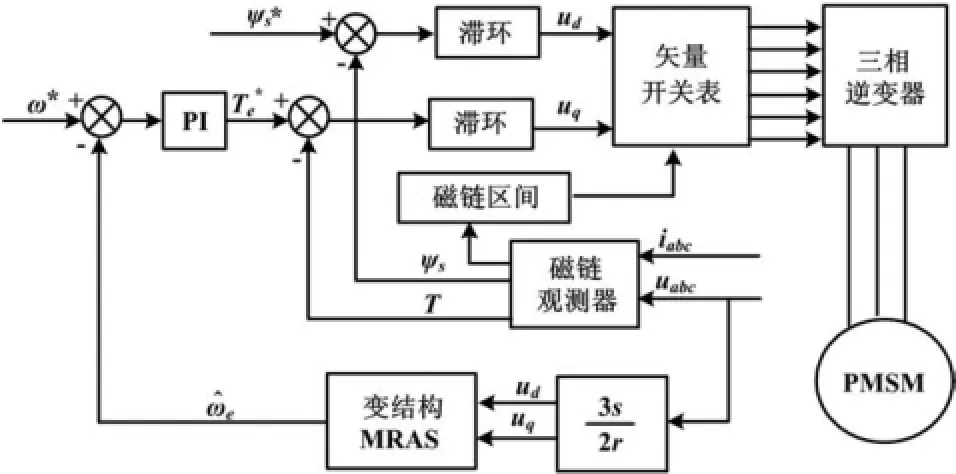
图2 变结构MRAS观测器的DTC系统Fig.2 The DTC system of variable structure MRAS observer
为验证观测器在速度改变时的跟踪性,给定起始速度和负载分别为1 000 r/min和2 N·m,在t=0.05 s时速度变化为-1 000 r/min。图3和图4为传统MRAS速度观测器和变结构MRAS速度观测器在转速变化时的转速响应曲线,以及由估计转速减去实际转速得到的误差曲线。
由图3和图4所示曲线可以看出,传统MRAS上升时间为0.009 95 s,变结构MRAS上升时间为0.009 88 s,速度稳态误差较小。
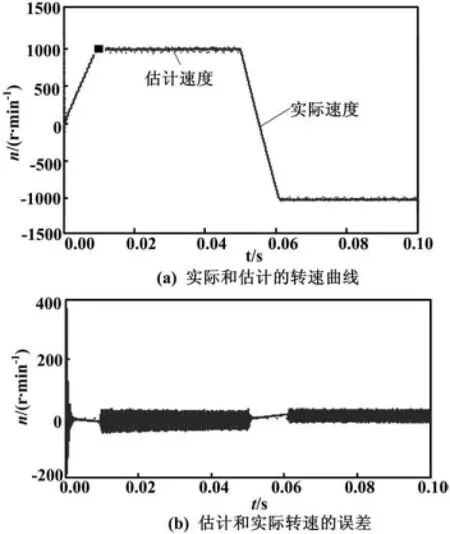
图3 转速突变时传统MRAS响应Fig.3 Response curves of traditional MRAS when rotate speed with abrupt changes
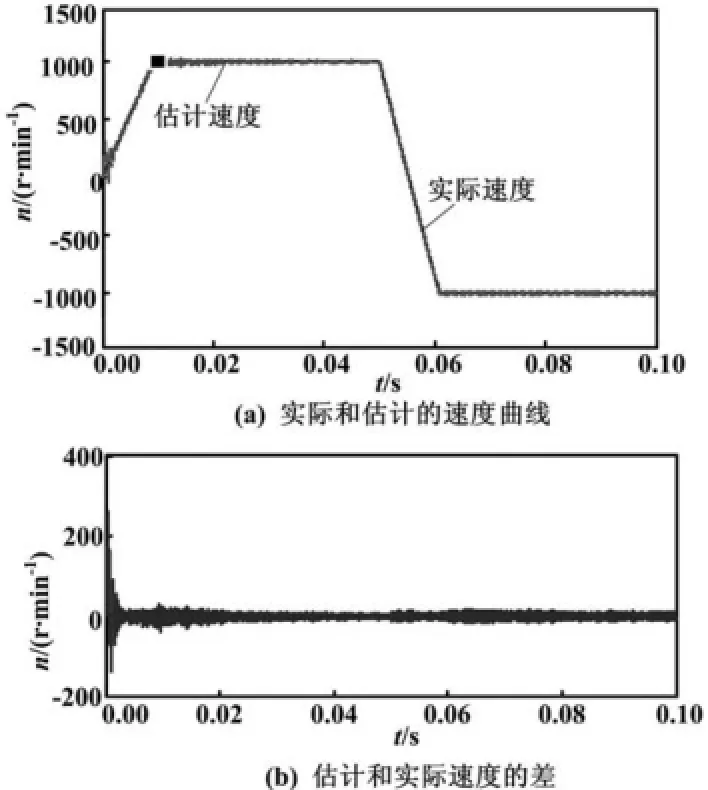
图4 转速突变时变结构MRAS响应Fig.4 Response curves of variable structure MRAS when rotate speed with abrupt changes
传统MRAS速度观测器对负载扰动的抗干扰能力不强(自适应律为PI的参数不可变性)。为验证速度观测器对负载扰动的鲁棒性,给定起始速度为1 000 r/min,在t=0.05 s时加入6 N·m的负载转矩。图5和图6为传统MRAS和变结构MRAS在转矩变化时的速度响应曲线及估计速度和实际速度的误差曲线。
由图5和图6所示曲线可以看出,传统MRAS在负载扰动时的速度动态响应恢复时间大于变结构MRAS恢复时间,且变结构MRAS的速度响应受负载扰动影响较小。
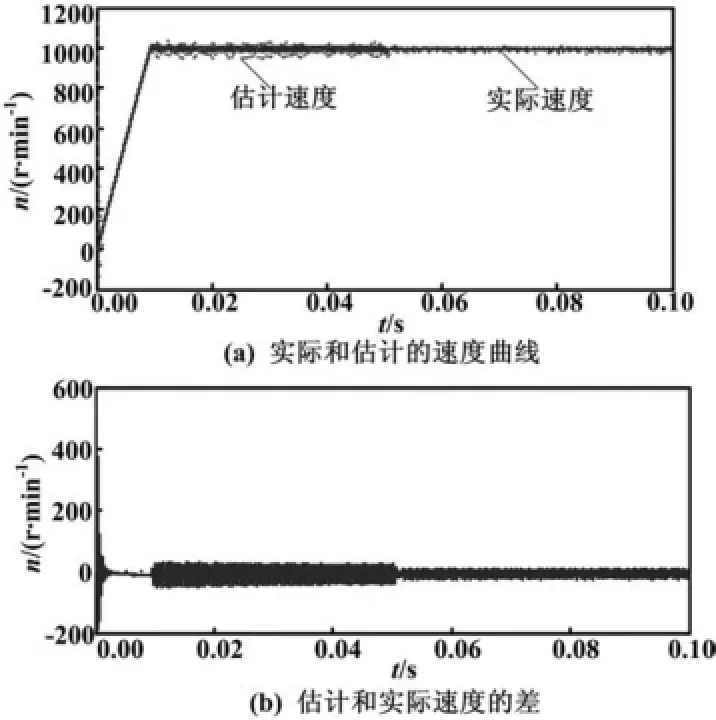
图5 负载突变时传统MRAS响应曲线Fig.5 Response curves of traditional MRAS when load with abrupt changes
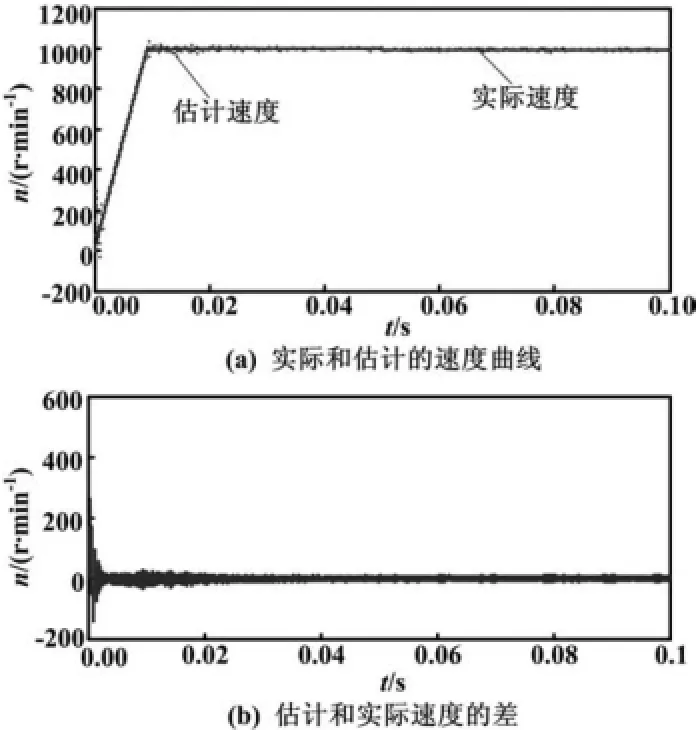
图6 负载突变时变结构MRAS响应曲线Fig.6 Response curves of variable structure MRAS when load with abrupt change
仿真结果表明,与传统MRAS转速辨识系统相比,变结构MRAS转速辨识系统的转速响应较快,动静态转速性能较好,对PMSM位置及速度的估计精度较高,抗负载扰动的能力变强。
4 结束语
在PMSM的无速度传感器控制系统中,将传统MRAS观测器设计成变结构MRAS的速度观测器。在理论分析的基础上进行了Matlab的仿真研究,结果表明,本文提出的变结构MRAS速度观测器对PMSM转速的估计精度较高,抗负载扰动和PMSM参数变化的能力较强,并且观测器的参数设置较传统MRAS简单。
[1] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
[2] Reigosa D D,Garcia P,Briz F,et al.Modeling and adaptive decoupling of high-frequency resistance and temperature effects in carrier-based sensorless control of pm synchronous machines[J].IEEE Transactions on Industry Applications,2010,46(1):139-149.
[3] 王礼鹏,张化光,刘秀翀.低速PMSM无速度传感器调速系统积分滑模控制[J].电机与控制学报,2012,16(2):21-24.
[4] 齐放,邓智泉,仇志坚,等.基于MRAS的永磁同步电机无速度传感器[J].电工技术学报,2007,22(4):53-58.
[5] Xu Huazhong,Xie Jun.A vector-control system based on the improved MRAS for PMSM[C]∥IEEE Conference Publications,2009:1-5.
[6] Mustafa R,Ibrahim Z,Lazi J M.Sensorless adaptive speed control for PMSM drives[C]∥IEEE Conference Publications,2010:511-516.
[7] 鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.
[8] 刘金锟.滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005.
[9] Comanescu M,Xu L.Sliding-mode MRAS speed estimators for sensorless vector control of induction machine[J].IEEE Transactions on,2006, 53(1):146-153.
[10] Mihai C,Todd B.Sliding mode MRAS speed estimators for sensorless control of induction machine under improper rotor time constant[C]∥IEEE International Symposium on,2007:2226-2231.
[11] 陈荣.永磁同步电机控制系统[M].北京:中国水利水电出版社,2009.
Variable Structure MRAS Rotate Speed Identification System for Permanent Magnet Synchronous Motor
In order to improve the sensitivity of model reference adaptive system(MARS)speed observer to the parameter changes and load disturbance in permanent magnet synchronous motor control,the variable structure MRAS rotate speed identification method is proposed.This method is using sliding mode variable structure to substitute the adaptive law of MRAS,and adopting hyperbolic tangent function Sigmoid to replace symbol switching function,thus the jittering of slide mode can be reduced.The theoretical analysis and simulation results show that the speed-sensor-less PMSM control system based on variable structure MRAS observer possesses better dynamic and static performance and stronger robustness.
Permanent magnet synchronous motor(PMSM) Speed-sensor-less Variable structure Model reference adaptive Rotate speed identification
TM341
A
修改稿收到日期:2013-11-09。
杜永栋(1987-),男,现为兰州交通大学控制理论与控制工程专业在读硕士研究生;主要从事交流电机无传感器控制系统的研究。
