舞台3D飞行机构控制技术探讨
2014-05-16谢海岐黄学通朱国良
谢海岐,黄学通,盛 敏,朱国良
(浙江大丰实业股份有限公司,浙江 余姚 315400)
舞台3D飞行机构控制技术探讨
谢海岐,黄学通,盛 敏,朱国良
(浙江大丰实业股份有限公司,浙江 余姚 315400)
介绍3D飞行机构空间运动学分析及控制系统技术途径,探索更为优化的设计方案。
3D飞行机构;运动分析;网络组态;控制模块;效果呈现
目前,拥有舞台3D飞行技术的国际知名品牌有Stage Technologies、Visual act、Ftsi automation等,其技术完全适用于各种应用场景的仅前两者;Ftsi automation设备更适应于特定的场所,诸如秀场等常年演出特定剧目的情况。目前国内尚无完全适应于舞台表演的3D飞行设备,几家公司研制的样机仍处于研发试制阶段。根据国家支撑计划“演出效果呈现关键支撑技术研发与应用示范”项目课题“舞台效果装备控制集成系统”的要求,研发先进实用的舞台3D飞行机构控制技术是其关键支撑技术之一。
1 多轴数控系统采用的基础技术
多轴数控系统设计主要体现于舞台运动控制逻辑模块的设计,该模块由西门子运动控制器SIMOTION D445-2、整流模块(SLM)、电机模块(18A)和伺服电机(1FK系列)构成。SIMOTION D系列运动控制器具备基于TCP/IP的标准通信接口,可以方便地与上位机进行通信。SIMOTION D445-2是基于驱动的控制单元,可以控制64根轴。S120伺服驱动器包括AC/AC单轴模块和DC/AC多轴模块,可用于高动态响应的运动控制及大转速范围内精确的转速和扭矩控制,各轴之间还能快速进行数据交换。S120集成的Profibus-DP接口,容易和上位机连接,能控制普通的三相异步机、同步机、扭矩电机及直线电机。
系统主要结构构建如图1所示,其中PG/PC为上位机部分,通过以太网与SIMOTION相连接。SIMOTION D445-2内部集成了一个驱动管理单元,其硬件组态图2所示。
图3为系统拓扑结构,为了实现对电机的更精准的控制,将整流模块和电机模块的控制分开。这样可以使电机模块的扫描时间更短,使控制精度更高。
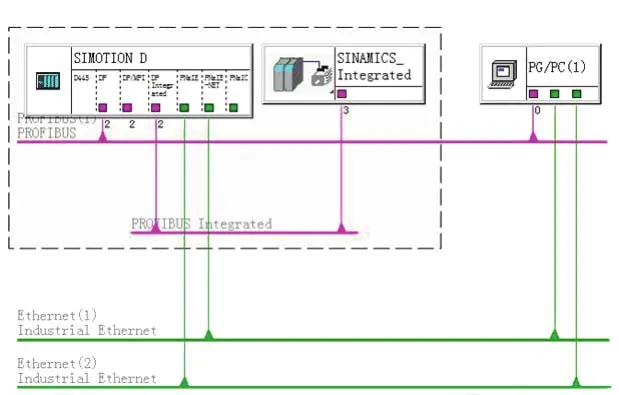
图 1 网络组态
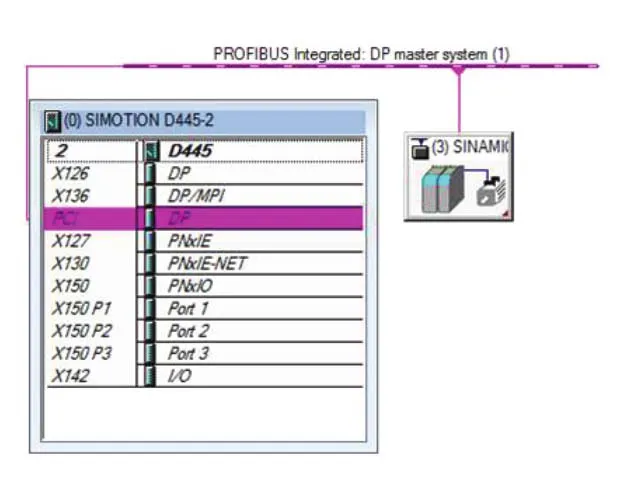
图2 硬件组态图
2 3D飞行机构的空间运动学分析及控制实现途径
在空间飞行控制运动的实现中,需要对多轴数控系统进行运动学分析。
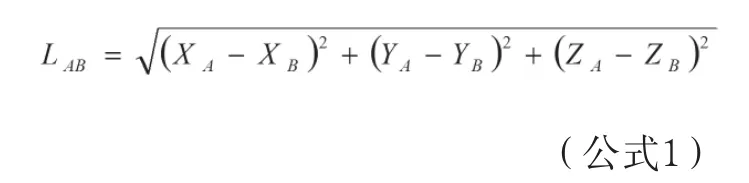
首先根据空间运动结构建立运动学模型,如图4所示。A、B、C、D分别为4个立柱的顶点,顶点定滑轮在计算中可视为一点。以D立柱底部为(0,0,0)点,可以确定一个空间笛卡尔坐标系,两点之间的长度用公式1计算:
假设当前绳吊位置为(x,y,z)。可通过公式2计算出当前位置到各个顶点的距离:
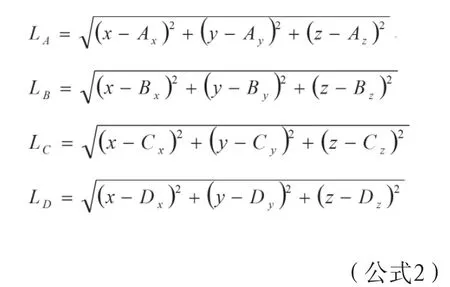
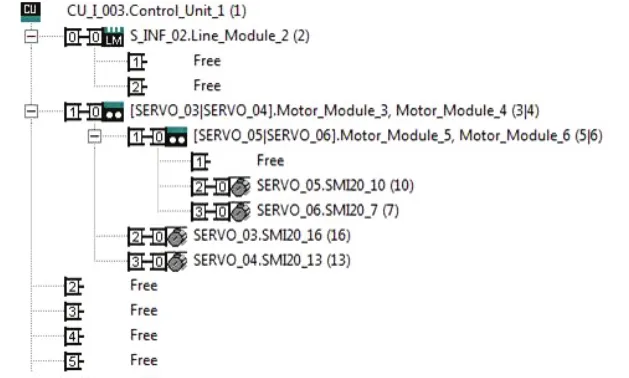
图3 系统拓扑结构图
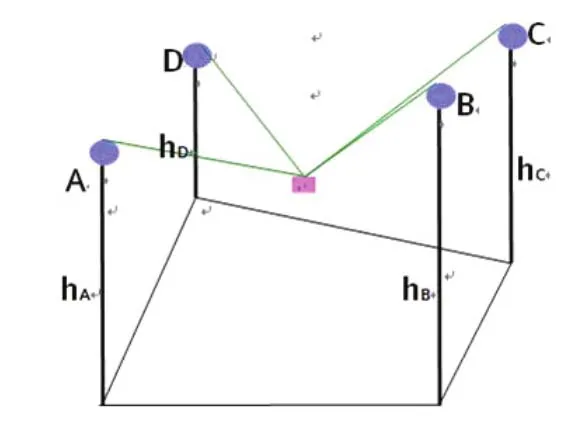
图4 运动学简图
在实现位置的同步上,由运动学解析可以算出4根吊绳各自的长度,但是如何使电机能够根据这个公式的计算结果进行同步是另一个难题。为了解决这个难题,按照以下步骤进行相关技术的实现。
(1)在SIMOTION中插入4个“Fomular”对象,如图5;

图5 公式对象
(2)使用3个虚轴来模拟绳吊的空间坐标,并建立公式连接,如图6所示;
(3)设定实轴的同步对象为公式,如图7所示;
(4)实现虚轴的空间插补连接,如图8所示;
(5)为公式赋值,如图9所示;
(6)开启公式同步,如图10所示。
这样就可以实现数控系统的四轴同步运行。

图6 公式连接图

图7 设定同步对象图
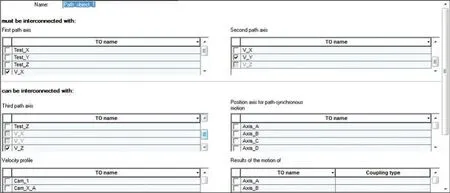
图8 设定插补对象连接

图9 实际公式赋值图
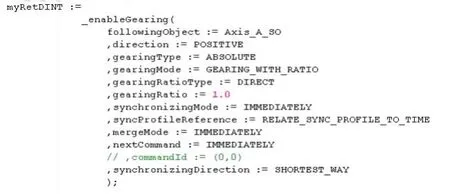
图10 同步调用指令
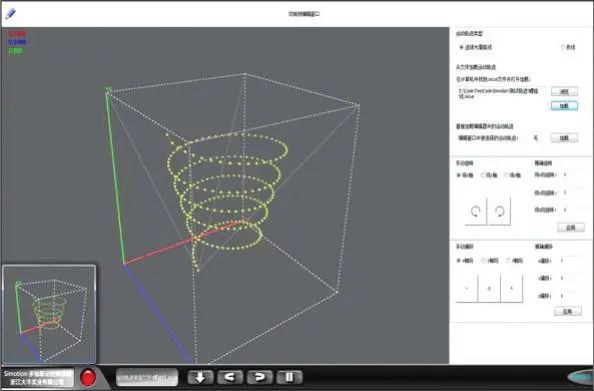
图11 运动仿真界面

图12 轨迹编辑规划界面
3 3D空间飞行系统测试
3.1 3D轨迹生成控制技术
运行3D空间轨迹生成控制系统,可进入轨迹编辑与仿真界面,如图11~图12所示。
该技术可与3D空间飞行装备融合使用。经软件使用实测表明,进入图13所示的“单场景轨迹数测试”场景,这里使用了创建、复制、移动、旋转等技术,从第四幅视图可见,本软件支持3D完全自由度轨迹编辑。
在“单场景轨迹数测试”界面下,从软件的“根据名称选择轨迹”功能可见,该场景共绘制了541条轨迹,而原设计指标200条,超过原设计指标1倍以上。
进入图14所示的“单条轨迹实际点数测试”界面,绘制了一条控制点数10 000的螺旋线后,将其转换为Bezier样长线,每线段增加插值为10,因此,单线点数约为100 000点,超原设计指标10倍。
进入图15所示的“单条轨迹控制点数测试”,绘制了一条单圈点数100,圈数100的螺旋线,因此,控制点共计约10 000,超过原设计指标10倍。
3.2 3D飞行机构系统
3D空间轨迹控制技术与威亚空间飞行装备融合后,构建舞台3D飞行机构系统,如图16所示,该系统由上位机、执行系统(下位机)和机械执行机构组成。
其中机械结构由4根立柱提供支撑,绳索通过立柱顶端定滑轮连接悬吊物体,每一根绳索由伺服电机驱动。悬吊物体可以在立柱包络范围的空间内运行到任意一点。通过控制悬吊物体的绳长,达到控制物体位置的目的。图17与18为机械结构图。
图19、图20为设备测试现场实景图。根据现场测试,空间飞行装置运行平稳,运用美国斯德克basic型手持测速仪以及博世激光测距仪DLE40设备测试相关参数,达到最高运行速度1 m/s、定位精度≤±3 mm、同步精度≤±5 mm,与舞台虚拟设计运动理论轨迹相符合度超90%以上。
图21为实际运行过程的监控画面,从中可以看到运行轨迹十分平稳,速度平滑,曲线没有突变点,达到原定设计标准。

图13 单场景轨迹数测试

图14 单条轨迹实际点数测试
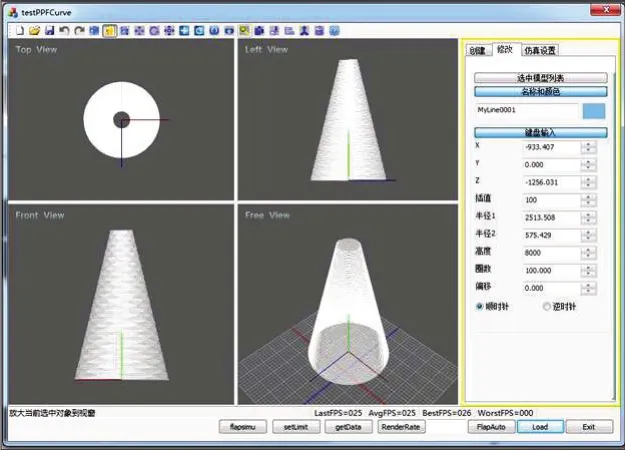
图15 单条轨迹控制点数测试
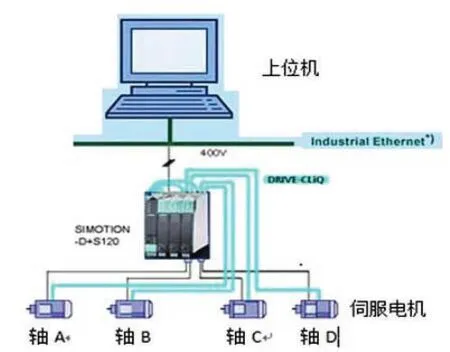
图16 控制系统组成
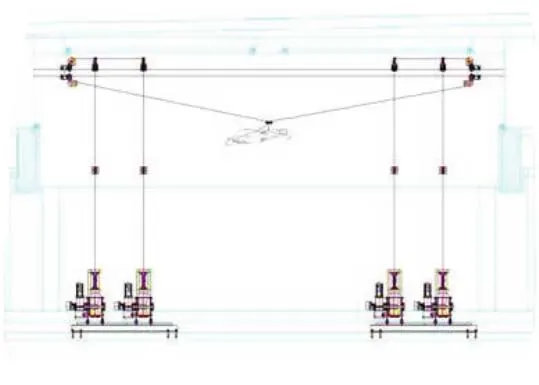
图17 机械设计正视图

图18 机械设计俯视图

图20 绳吊调试结构图
4 总结
3D空间飞行系统的控制技术研制,达到了设计预期,作为舞台效果呈现的关键支撑技术之一,体现了自主创新技术用于演出场所的重要价值。
注:本文得到国家科技支撑计划“演出效果呈现关键支撑技术研究与应用示范”项目,“舞台效果装备控制集成系统”课题(课题编号:2012BAH38F01)的资助。
参加本文内容研究的有:魏发孔、薛焕新、吴太利、姚亮、刘榛、吴立锋等。
[1]刘善增,朱真才,王洪欣,訾斌. 柔性并联机器人的研究进展[J]. 组合机床与自动化加工技术,2010(5).
[2]王薇. 深入浅出西门子运动控制器:SIMOTION实用手册(第一版)[M]. 北京:机械工业出版社,2013.
(编辑 薛云霞)
Discuss about 3D Flight Mechanism Control Technology in Stage
XIE Hai-qi, HUANG Xue-tong, SHENG Min, ZHU Guo-liang
(Zhejiang Dafeng Industrial Co., Ltd., Yuyao Zhejiang 315400, China)
The spatial kinematics analysis and control system technological approaches of 3D flight mechanism were introduced, so as to explore a more optimized design scheme.
3D flight mechanism; kinematics analysis; network configuration; control module; effect rendering
10.3969/j.issn.1674-8239.2014.11.009
