一种改进的多假设跟踪算法
2014-05-10蒋富勤朱鲲祝献
蒋富勤 朱鲲 祝献
(第七一五研究所 声纳技术重点实验室,杭州,310012)
在目标检测中,提高门限,可以降低虚警,但同时也降低了检测概率,影响目标检测,尤其是弱目标检测。事实上,对于虚警,可以通过后续观察予以剔除。因此,在目标检测过程中,适当降低门限,提高检测概率,允许一定的虚警概率,通过后续观察数据来辨识哪些是目标,哪些是虚警,哪些出现漏报。
在检测概率小于1和存在虚警或杂波情况下的目标跟踪,其主要难点在于数据关联。目前,已发展了许多方法试图解决这一问题。两种简单的方法是强近邻方法(SN)[1]和最近邻方法(NN)[2]。SN 关联跟踪门内最强的测量。NN则关联跟踪门内与预测值最接近的测量。随着虚警概率的增加,这两种方法无法实现目标跟踪。概率数据关联(PDA)[3]则选用跟踪门内所有测量,而不是其中一个,赋予它们不同的概率。在多目标情况下,除了测量与测量之间存在竞争外,测量还可能位于多个目标的跟踪门内,数据关联与跟踪变得更为困难。其它方法还有全局最近邻方法(GNN)、联合概率数据关联(JPDA)[4]、多假设跟踪(MHT)[5]、概率多假设跟踪(PMHT)[6],维特比数据关联(VDA)[7]等。
1979年,Reid在0-1整数规划方法基础上,结合全邻最优滤波器和Bar-Shalom的聚概念,提出了多假设跟踪方法。MHT建立多个候选假设,通过后续观察数据进行延迟关联判决,但假设数目随目标个数和虚警个数的增加呈指数级增加,需要对假设进行修剪,删除低概率的假设,维持适度规模的假设数目。这也是MHT实现工程化应用的关键步骤。
维特比算法在通信和语音识别中广泛使用,它在离散马尔科夫系统中是最佳的。在数据关联中,维特比算法同样得到应用。VDA的关键思想是基于测量而不是离散状态集创建网格图。网格上的路径对应一个数据关联序列。维特比算法可确定网格上的最小代价路径。本文结合MHT和VDA的思想,提出了一种改进的多假设跟踪算法。降低计算复杂度,实现快速目标关联与跟踪。
1 状态-空间模型
对于单阵多目标数据关联和跟踪问题,为简单起见,这里假设目标个数为T,且目标相互独立,不机动。那么多目标跟踪系统模型可用状态-空间模型表示:

其中i= 1,2,… ,T,xi(k)是k时刻第i个目标的状态向量,F(k)是已知的状态转移矩阵,vi(k)和wi(k)是独立同分布的零均值白高斯噪声,yj(k)是目标测量,H(k)是测量矩阵。目标和测量之间的对应关系i↔j未知。在测量过程中,目标可能存在漏报和虚警。虚警采用PDA均匀/泊松模型,即虚警测量值在测量空间内服从均匀分布,虚警个数服从泊松分布,其参数为λ。
2 算法原理
2.1 多假设跟踪算法
NN是最简单的关联算法,它关联跟踪门内与预测值最接近的测量,其计算公式如下:
MHT正是基于延迟判决的思想发展而来的。它认为每个新接收到的测量可能源于新目标、虚警或已知目标,它通过一个有限长度的时间滑窗,建立多个候选假设,通过数据聚类、假设生成、假设删除、假设矩阵管理等步骤实现数据关联和目标跟踪。由于假设数目随目标个数和虚警个数的增加呈指数级增加,需要对假设进行修剪,删除低概率的假设,如 m-最优MHT算法。
m-最优MHT算法的核心思想是通过Murty算法搜索前m个最优解,即删除各时刻低概率假设,保留前m个最优假设,抑制假设个数的急剧增加。这种算法虽然可以缓解计算量的指数级增长,但当目标个数和虚警数目较多时,Murty算法搜索最优m个解依然需要较长时间,需要进一步优化。
2.2 维特比数据关联算法
VDA 算法[7]是在网格图中搜索数据关联kΘ中最有可能的序列:

其中,Xk、Yk分别是1~k时刻的状态序列和测量序列。
关于测量序列和关联事件序列的联合概率密度可分解为
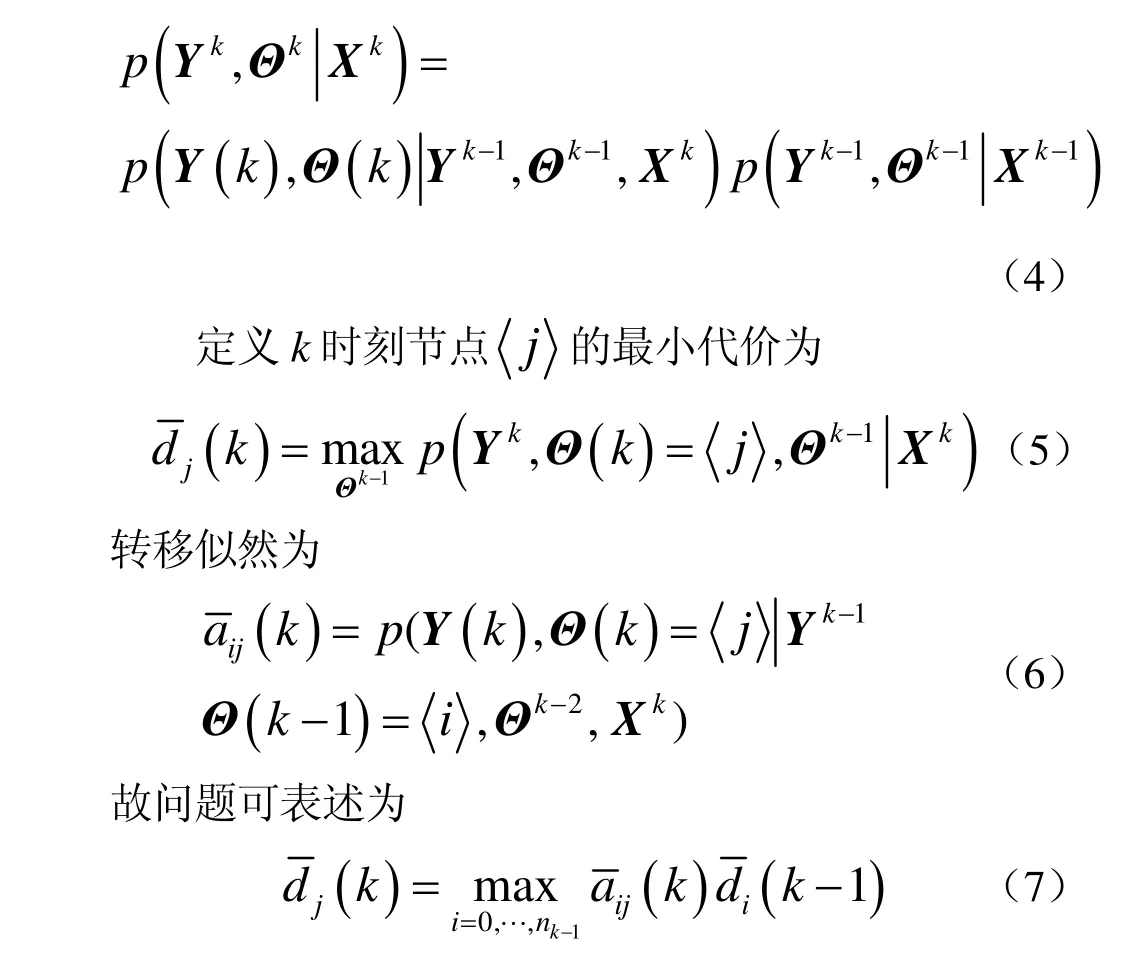
其中j= 0 ,… ,nk,nk是k时刻时网格图的节点个数,其与测量个数有关。对代价取负对数,问题可转化为搜索最小代价路径问题:



2.3 改进的多假设跟踪算法
为减少MHT计算量,需要对假设生成和假设删除等进行优化。这里,通过网格图减少假设数目,删除低概率假设,实现快速目标关联跟踪。每个新接收到的测量可能源于新目标、虚警或已知目标,同时考虑这3种情况计算复杂。这里对于目标的关联跟踪分成两步。
2.3.1 关联跟踪已知目标。
对于已知目标而言,新目标和虚警测量都是错误关联的测量,均可视为虚警。因此,测量假设分为两种情况:源于已知目标、源于虚警和新目标。
图1表示k-1时刻到k时刻的网格图。每个节点包含目标编号、当前时刻目标状态和协方差矩阵、路径代价,以及指向前一时刻的节点位置。图1(a)表示位于门限范围以内的路径;通过比较节点上各路径的代价,图1(b)给出了各节点选择的幸存路径。从图中可以看出,k时刻节点3没有与k-1时刻的节点关联,认为其为虚警。k时刻节点1和节点2均与k-1时刻节点1关联,路径出现分支,需要通过后续观察数据确定哪一条是真实路径。k-1时刻节点2没有与后续节点关联,该路径终止,停止跟踪。如果它是分支路径之一,认为其不是真实路径。但实际上检测概率不为1,会出现漏报,为此k时刻设置新的节点,关联k-1时刻未被关联的路径节点2,节点状态采用预测值。若这条路径不是真实路径,其后续路径多采用预测值,而不是测量值与之关联。在一定长度时间窗内,当采用预测值次数或代价大于某个门限时,停止跟踪,修剪这条分支路径,释放分支期间关联的测量数据。
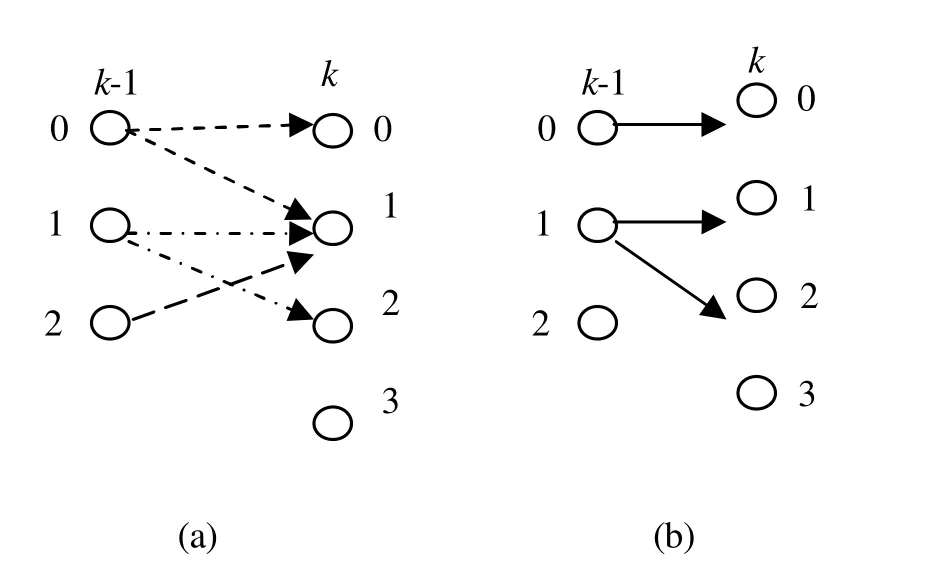
图1 网格图
2.3.2 新目标初始化
测量假设分为两种情况:潜在的新目标和虚警。在k-p时刻,若存在m个未关联的测量数据(即认为是虚警的测量和被修剪的分支测量),假定其为潜在的新目标Newi,i= 1 ,… ,m,重复第一步的过程,其中关联的数据为k-p~k时刻未关联的测量数据。到k时刻时,若某个潜在目标路径上关联的测量数据个数大于某个门限(如Pd*(p+1),其中Pd为检测概率),则认为该目标为新目标,否则认为是虚警。
在目标跟踪过程中,设置计数器q,q 若目标1和目标2在跟踪过程中出现交叉,有时会出现交叉之后,1)交叉后目标1路径分配给目标2,目标2路径分配给目标1,称之为交叉交换;2)交叉之后的两条路径均分配给同一个目标,造成另一个目标失跟。为此,若目标间距离小于某个门限值,认为其可能会出现交叉,对其进行数据关联时应考虑:1)门限内存在多个测量时,每个目标至少分配一个节点,避免目标失跟;2)根据一段时间的目标路径数据进行曲线拟合,预测当前时刻测量值,而不是采用一步预测值。在这两个原则基础上选择使代价最小的数据关联方案。 仿真中,共有6个目标,测量数据为目标方位,其方位标准差σ为0.5º,检测概率Pd为0.8,虚警值服从均匀分布,其个数服从泊松分布,参数λ取4和8。改进的MHT算法结果见图2。 图2 多目标关联跟踪结果 图2(a)和(c)是λ取4和8时的测量数据,图 2(b)和(d)为相应的关联跟踪结果,不同颜色代表不同目标的关联跟踪结果。从图中可以看出,改进的MHT算法可以实现虚警环境下的多目标关联与跟踪。 在个人计算机上,采用 m-最优 MHT算法(m=2,延迟判决长度N=5)时,完成上述6个目标的跟踪(λ=4)需要845 s,不使用新目标初始化功能时需要31.5 s;而相同情况下,采用改进的MHT算法前者只需2.9 s,后者只需1.5 s,运算速度得到大幅提高。 假定跟踪后得到的方位值与真实值相差 1°以内,则认为该时刻检测到目标,那么跟踪前后参数λ取不同值时的检测概率Pd如图3所示(跟踪前检测概率恒定,50次蒙特卡洛仿真,6个目标结果取平均值),检测性能得到提高。 图3 跟踪前后检测性能变化曲线 图4给出目标起始时刻不同时的关联跟踪结果,验证了本算法新目标初始化的有效性。 图4 新目标初始化关联跟踪结果 对于交叉目标,考虑方位上较远目标和相近目标交叉两种情况,如图5所示。 图5 交叉目标关联跟踪结果 改进的MHT算法对交叉目标进行跟踪时,虽没有交叉后两条路径分配给同一个目标,但交叉交换现象依然存在,表1给出不同检测概率和虚警个数时的交叉交换次数(表中前一个数字表示较远目标的交叉交换次数,后一个数字表示相近目标的交叉交换次数)。从表中可以看出,检测概率越高、虚警个数越少,完成交叉过程越短,出现交叉交换的可能性越低。 表1 出现交叉交换的次数(50次蒙特卡洛仿真) 在检测概率小于1和存在虚警或杂波情况下的目标跟踪,其主要难点在于数据关联。理想情况下,MHT算法是数据关联问题的最优解,但计算量大。本文结合VDA和MHT,提出了一种改进的MHT算法,它通过对假设生成和假设删除过程进行优化,分步进行已知目标的关联跟踪和新目标的初始化,降低计算复杂度,实现快速目标关联跟踪,并且提高了检测性能。对于交叉目标,采用曲线拟合方式预测当前时刻的测量值,降低交叉交换出现的可能。通过仿真分析,验证了该方法的有效性。 [1] RONG LI X, ZHI XIAORONG. A refined strongest neighbor filter for tracking in clutter[C]. Proceedings of the 35thconference on Decision and control, Kobe, 1996:2557-2562. [2] RONG LI X, BAR-SHAALOM Y. Tracking in clutter with nearest neighbor filters: analysis and performance[J]. IEEE transactions on aerospace and electronic systems, 1996, 32(3):995-1010. [3] BAR-SHALOM Y, KIRUBARAJAN T, LIN X.Probabilistic data association techniques for target tracking with applications to sonar,radar and EO sensors[J]. IEEE A&E systems magazine, 2005, 20(8): 37-56. [4] BAR-SHALOM Y, BLAIR W D. Multitarget-multisensor tracking: applications and advances Volume III[M]. Norwood,MA: Artech House, 2002: 175-184. [5] WILLETT PETER, LUGINBUHL TOD, EVANGELOS GIANNOPOULOS. MHT tracking for crossing targets[C]. SPIE conference on Signal and Data Processing of Small Targets, 2007:66991C:1-12. [6] WILLETT PETER, RUAN YANHUA, STREIT ROY.PMHT: problems and some solutions[J]. IEEE transactions on aerospace and electronic systems, 2002, 38(3): 738-754. [7] PULFORD G W. Multi-target viterbi data association,information fusion[C]. The 9th International Conference of ICIF, 2006.3 仿真结果





4 总结
