井下7″级导线及四等水准控制网的建立
2014-05-10张敬霞
张敬霞
(安徽理工大学 测绘学院,安徽 淮南 232001)
高精度的矿山三维控制网是矿山生产和灾害监测的重要保障,关系到煤矿自勘探直至报废的每一个环节。GPS、高精度陀螺全站仪、测量机器人等技术已经在不同的领域得到了广泛的应用,并取得了较为理想的效果[1-7]。如何采用现代测绘技术建立高精度的井下三维控制网,就成为矿山测绘工作者面临的一个重要问题。本文针对主副斜井开采矿井,综合采用GPS、磁悬浮陀螺仪、水准仪以及全站仪,进行高精度矿山三维控制网的建立,并以某矿区具体实测数据为例,系统介绍建立井下7″级导线和四等水准控制网所需的设备及其主要技术指标,并给出应注意的事项。
1地表平面控制网的建立
中煤平朔集团有限公司下属井工一矿的主采区主要分为“九煤”和“四煤”,随着采区的不断推进,采区所在位置最近处距井口约4000 m,原有的控制网已难以满足矿山生产的需要,需要更新或者重新建立,考虑到该矿井的具体情况,矿方决定重新建立矿井地表和井下的三维控制网。
1.1数据的选取
该矿区在平面坐标系统为1.5°带高斯投影,中央子午线为112°30′,高程坐标系统为56黄海高程。地测部提供了三个国家四等点和一个GPS D级点为起算点,采取插网方式建立该矿区E级GPS网。同时,提供了一个二等国家水准点和一个地测部按照三等水准要求联测的水准点。
对上述点位进行了实际踏勘,对附近有大面积水域和遮挡物,不满足GPS测量要求的点位予以剔除,选取包括三个控制点在内的8个点位进行GPS静态观测。
1.2 GPS控制网
对于平面网,起算点至少应有两个,才能解决基准问题;高程网则至少需要一个高程起算点,才能解决高程基准问题。选取三个四等国家点作为平面网起算基准,高程基准选取国家二等水准点。
根据《全球定位系统(GPS)测量规范》[8]确定GPS测量的各项技术指标,采用四台Ashtech 单频GPS 接收机进行观测,由于点位较少(仅8个),构网模式仅采用边连接,以提高GPS网的结构强度,共4个时段进行观测,采用随机软件Ashtech Solutions 2.6 进行数据的处理。
由于该矿区采用的平面坐标系统中央子午线为112°30′的1.5°高斯投影坐标,而Ashtech Solutions 2.6 软件采用的坐标系统为中央子午线为111°的3°带,需要对解算结果进行换带计算,其相关原理参见文献[9],本文采用 HDS2003软件包自带的坐标转换模块,进行相关数据的处理。
2 井下数据采集
2.1 基本控制导线
基本控制导线应沿矿井主要巷道(包括:斜井、暗斜井、平硐、井底车场、水平运输巷道、总回风道、集中运输石门等)敷设。根据矿区实际情况,在井下布设了110个导线点,最大边长为171.8 m,最小边长为15.1 m,平均107.1 m。其中“九煤”79个导线点(包含17个永久点),“四煤”31个导线点(包含14个永久点)。永久点共有8组,一组3~5个,分别以A-H后面加数字区别,临时点分别以数字编号。
仪器选取:瑞士徕卡TCR802防爆全站仪,测角精度:2″,测距精度:2 mm + 2 ppm(IR单棱镜);同时,应在下井前对仪器进行检验和校正,确定棱镜常数,并对每个测站的气温和气压当场测量;对于靠近井口永久点的测量时,需要挡风板辅助脚架的整平对中。测量的主要技术指标参见《煤矿测量规程》[10]。
2.2 水准测量
井下高程测量主要是建立一个与地面统一的高程系统,确定各种采掘巷道、硐室在竖直方向上的位置以及相互关系,以解决各种采掘工程在竖直方向上的几何问题。
由于该矿井主副井均为斜井,在高程导入过程中可以直接导入高程,不必进行联系测量,所以,高程控制网的布设过程中,直接选取永久点作为水准路线的待测点。水准路线为国家二等水准点出发的闭合环,对“九煤”和“四煤”进行水准联测,在工作量增加不大的情况下,建议进行较小范围的闭合环,以提高检核的条件。
此次高程测量使用的仪器为WILD NA2 型水准仪;根据《煤矿测量规程》规定的井下高程测量的各项具体技术指标施测,本次测量采用木质黑红双面尺,采用“后-前-前-后”、“黑-黑-红-红”的读数方法进行水准环线的往返测量。
3数据处理
3.1导线网平差
在进行平差计算前,首先对所测数据记录进行检核,经检验无误后,然后对导线网进行点位的概算,“九煤”和“四煤”概算后的主要技术指标见表1,各导线的技术指标都满足限差要求。

表1 导线概算结果
由于井下导线测量的温度和压强对测量结果有影响,且与全站仪内默认的常温和常压相差较大,故需进行温度和压强改正。除此之外,《煤矿测量规程》规定贯通测量工作中,还应当考虑导线边长归化到投影水准面的改正和投影到高斯-克吕格平面的改正。为了保证精度,在坐标概算已满足要求的情况下,进行各种边长改正。边长换算之后,对各点坐标进行重新概算,主要技术指标见表2。

表2 边长改正后的导线概算结果
采用测角中误差作为标准来衡量测量精度,其值可用下式计算:
(1)
式中σ—测角中误差;d—两个测回角度的差值;n—测量测量角度个数。
计算结果见表3。

表3 导线网中误差
3.2水准网平差
将实际测得的结果经过检核确定无误后,进行水准概算,分别计算“九煤”闭合环、“四煤”闭合环以及“四煤”“九煤”小环线的闭合差(表4)。
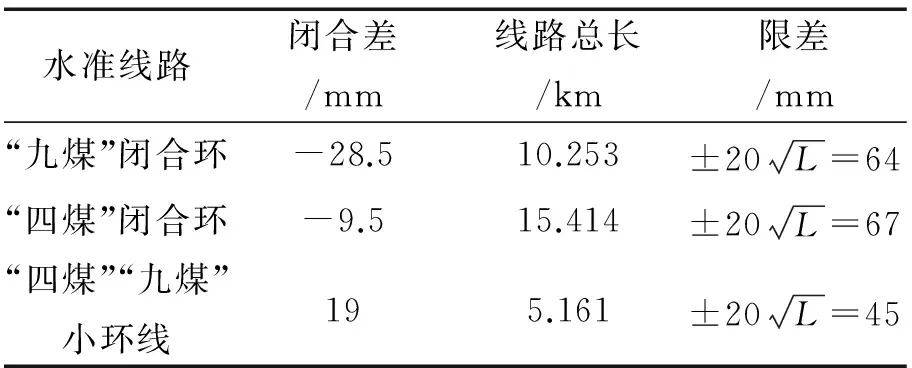
表4 水准线路闭合差
在确定数据合格后,采用由安徽理工大学自主研发的GMDPS软件[11],进行水准网的平差计算。结果的单位权中误差为 4.82 mm,每公里观测高差之全中误差为 7.62 mm。其水准网平差结果(部分)如表5所示。

表5 水准网平差结果(部分)
4陀螺定向导线网平差及质量控制
4.1 数据采集
在进行“九煤”和“四煤”导线网平差过程中,分别计算出了最弱点的位置为D4和H4。根据《煤矿测量规程》要求:每1.5—2 km布设一个陀螺边,以及实地考察结果和数据预处理结果,将陀螺边分别设在A3→A2、C2→C1、H2→H1、D2→D3、Z3→Z2和G3→G4位置处。
本次测量选用由长安大学与中国航天16所联合研制的GAT-05B型磁悬浮陀螺全站仪[12]。依据《煤矿测量规程》中相关规定,主要工作流程为:(1)在地面已知边上采用测量三测回,确定仪器常数;(2)在井下定向边上用两测回测量陀螺方位角;(3)返回地面后,在原已知边上再测量三测回,检核仪器常数。同时,为了保证同一方向测线各测回间观测数据彼此的独立性,在各测回间重新整平对中仪器。
由于该陀螺经纬仪定向精度可以达到5″,因此要求同一边任意两测回测量陀螺方位角的互差≤10″;对于超限数据应在现场予以补测,以保证地面常数标定测回总数不少于6个测回,井下各定向边不少于2个测回。
在实测过程中,选取地面控制网中F1、F2和F3三个控制点构成的测线F1→F2、F1→F3 进行仪器常数标定。但由于F1点所在的地面水泥块体有松动现象,影响仪器安置的稳定;F2点的地面松软不适合架设仪器;F3点属于井口近井点,位于墙角处,风振回流现象对仪器的影响较为严重;因此为加强测量数据的可靠性,在F1→F3测线上采用对向观测的方法对数据进行检核。
4.2 数据处理及分析
根据每个测回的4万组寻北采样数据即可计算出测站点的真北方位,去除由大型机械设备、车辆振动、巷道内风振等不利因素造成的粗差,定向结果(部分)如表6所示。
由地面控制点坐标,计算F1→F3、F1→F2和F3→F1的坐标方位角、测站点子午线收敛角,再根据A=α+γ(其中A为测线的真北方位角;a为测线的坐标方位角;γ为测站点子午线收敛角,可通过《子午线收敛角系数表》计算得到)可得测线真北方位角。再根据A=T+Δ(其中T为测线的陀螺定向值;Δ为陀螺全站仪的仪器常数)结合陀螺的地面定向成果,计算陀螺仪器常数(表7)[13]。
一次测定中误差
将上述计算得到的仪器常数,配合井下各定向边的陀螺定向成果,依据α′=T′+Δ-γ可得井下各定向边的坐标方位角(表8)。
4.3 陀螺导线网整理平差及质量控制
对导线网和陀螺定向边进行联合数据处理,综合考虑井下测量过程中受到风吹引起的对中误差、光线水汽等引起的测距误差、照准误差以及视线偏差等影响。同时,根据规程中要求和实际概算分析,陀螺边定向中误差设定为12″,测边中误差设定为2 mm+2 ppm,进行平差计算,并通过迭代运算[14],修正不同观测之间的权值,最终结果(部分)如表9所示,验后单位权中误差由未加测陀螺边的7.85s减小到6.11s,同时,通过两种技术的共同观测,点位的可靠性显著增强。
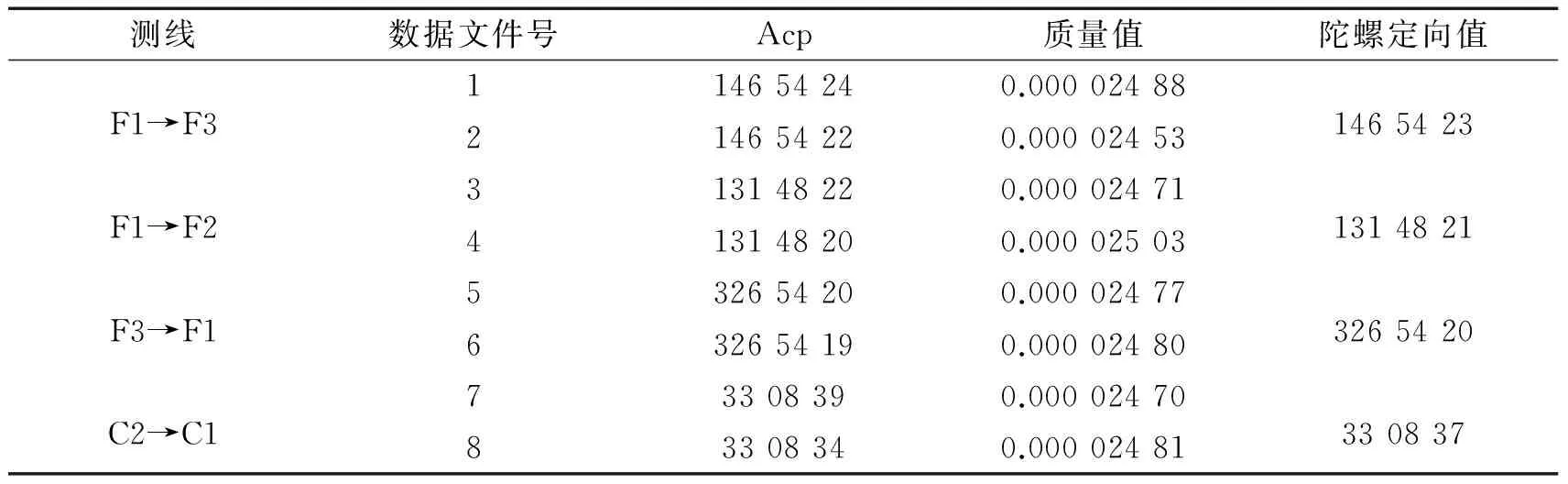
表6 陀螺定向值结果(部分)
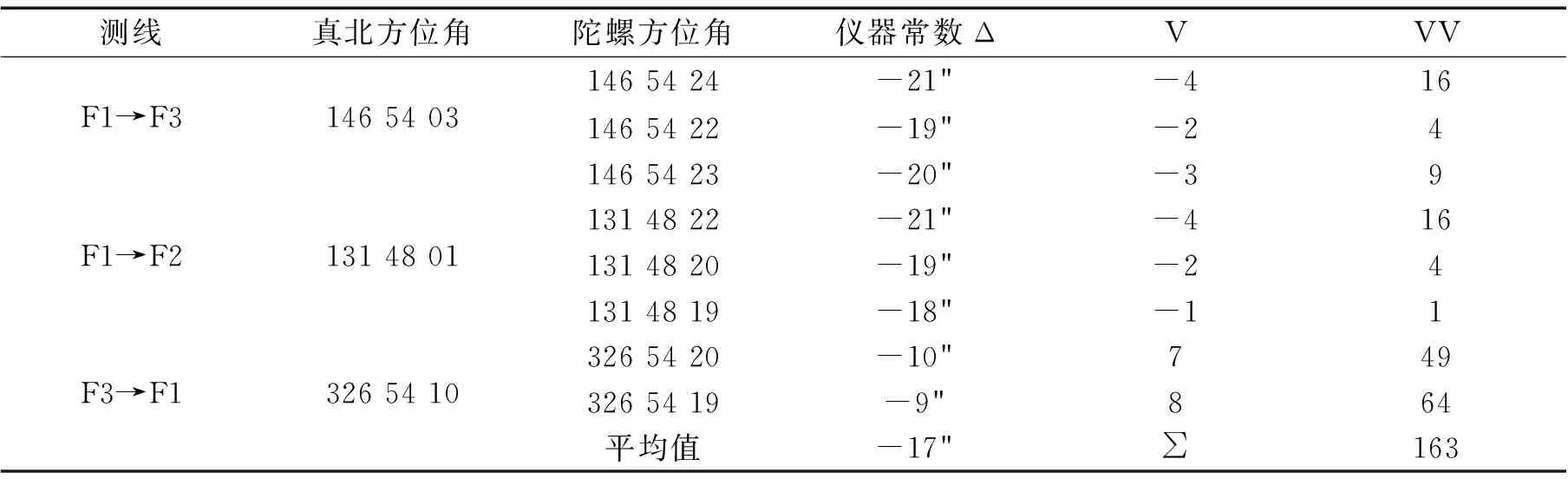
表7 仪器常数

表8 坐标方位角
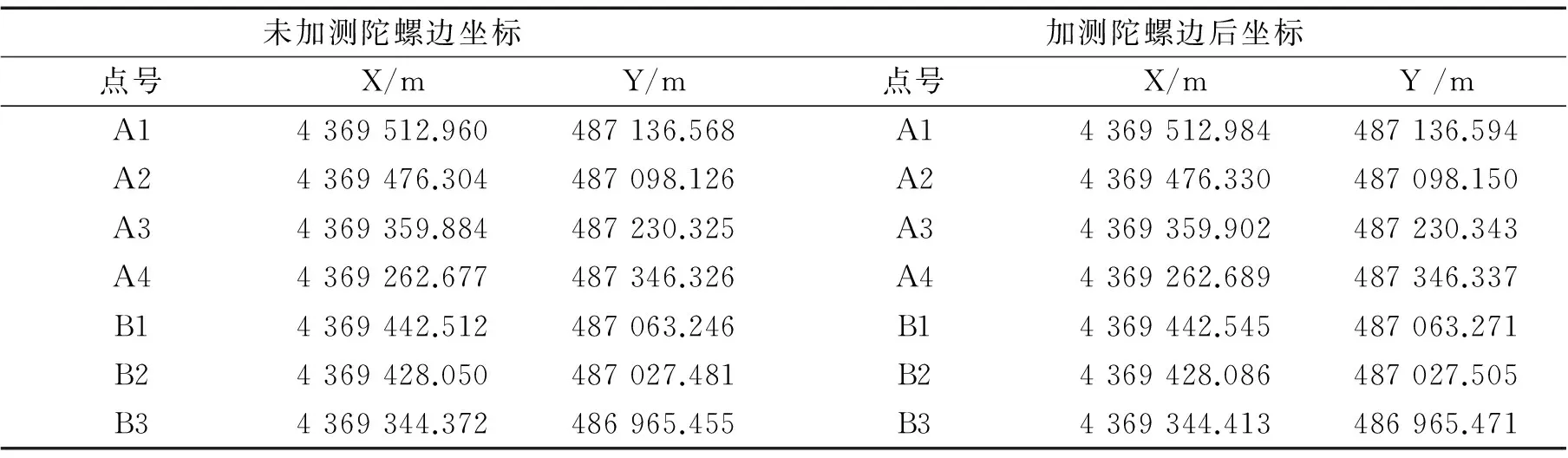
表9 平差后坐标(部分)
5结论
1)水准网平差结果显示本次水准测量精度可以达到四等水准要求,大大高于井下首级控制网高程规定,可以为井下作业提供高程基准。
2)导线闭合差达到了城市测量中一级导线(5″)技术要求和《煤矿测量规程》中基本控制导线(7″导线)的精度要求。
3)加入陀螺定向边后,控制了角度误差传递,在长距离井下导线测量中提高了导线的精度,同时,一定程度上检验了导线测量数据,有效的提高了点位的可靠性。
4)最弱点点位误差为0.46 m,其相对误差为1/25 924,远高于规程中要求精度(1/8 000),井平差计算后的各点可以作为井下平面基准,指导井下作业。
参考文献:
[1] 牛根良.GPS控制网贯穿新疆天山南北[J].工程勘察, 2009(S2): 414-418.
[2] 丁献龙.提高隧道平面控制网的精度方法探究[J]. 测绘与空间地理信息, 2010, 33(3):187-191.
[3] 刘 超,高井祥,王 坚,等.GPS/伪卫星技术在露天矿边坡监测中的应用[J]. 煤炭学报, 2010, 35(5):755-759.
[4] 刘沂星,苏国强,翟嘉伦,等.新景矿两井间大型贯通
测量的实践与研究[J].中国科技信息, 2010(2): 76- 78.
[5] 袁仁爱,杜 强,罗田郎.浏阳河隧道3#竖井陀螺定向联系测量技术[J]. 铁道工程学报, 2010, 136(1):59-62.
[6] 邹双朝, 李端有, 周 武, 等.地质灾害变形监测系统开发及应用[J]. 地理空间信息, 2010, 8(4):66-68.
[7] 陈秀忠,刘瑞敏.测量机器人在标靶控制点测量中的应用研究[J]. 测绘通报, 2007(4):20-22.
[8] 国家测绘局测绘标准化研究所.全球定位系统(GPS)测量规范[M].北京:中国标准出版社,2001.
[9] 孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2006.
[10] 原中华人民共和国煤炭部.煤矿测量规程[M].北京:煤炭工业出版社,1989.
[11] 余学祥,张华海,高井祥,等.GPS监测网数据处理软件包的研制[J].矿山测量,2003(4):11-14.
[12] 王 涛.GAT陀螺全站仪贯通测量一体化系统研究与开发[D].西安:长安大学,2008.
[13] 石 震,杨志强,杨 帅,等.基于度盘配置法的陀螺定向新方法及相关问题研究[J].测绘通报,2011(2):87-89.
[14] 崔希璋,於宗寿,陶本藻,等.广义测量平差[M].武汉:武汉大学出版社,2001.