基于高分辨率遥感影像的内河航标自动检测方法
2014-05-10张绍明桂坡坡刘伟杰王国锋
张绍明,桂坡坡,刘伟杰,王国锋
(1.同济大学 测绘与地理信息学院,上海 200092;2.上海市城市建设设计研究总院,上海 200125;3.中国公路工程咨询集团有限公司,北京 100097)
随着遥感技术的进步,遥感影像分辨率的不断提高,遥感在各行各业都将有着广阔的应用前景.在海事和航运管理中,遥感与船舶自动识别系统(automatic identification system,AIS)、地理信息系统(geographic information system,GIS)的结合日益紧密,在航道水域生成高精度正射影像与AIS和GIS结合用于数据分析.航标是引导船舶航行、定位和标示碍航物与表示警告的人工标志,其在航运管理中具有重要意义,基于高分辨率影像的航标提取具有很高的应用价值.航标按其位置可分为海区航标和内河航标,本文主要以内河航标中浮动航标为例进行提取,包括系船浮筒、通航浮标等.由于遥感卫星对地面点数日或数十日即可完成回访,因此同一区域拥有大量不同时段的遥感影像,通过不同时段遥感影像的航标提取,可以得到航标的位置变化以及由航标推算出的航道的变更情况,为航标航道的数字化提供数据支持.
基于遥感影像的航标提取工作通常可分为两个阶段:①水陆分割或水体提取;②水域中的航标提取.
高分辨率影像的水陆分割实质是水边界的提取,目前国内外已有部分相关研究,如文献[1]利用小波技术对图像进行膨胀和去噪处理,最后利用水体信息的地学特征,对图像进行联合特征去噪,获取最终的水体影像信息;文献[2]采用数学形态学的方法对遥感影像上的水体进行了提取;文献[3]根据水域边界信息实现了水域的自动提取.但是这些提取方法直接破坏或忽视了水域内小目标信息,不能作为本文航标提取的水域提取方法.文献[4]中论述了在只有一种感兴趣类别的情况下,单类支持向量机能以少量样本高效地进行分类,并且对小目标信息不具有破坏性.本文为保留水域内小目标信息采用了单类支持向量机的方法,分割水域的同时也区分离出了水域内的小目标.
在水面小目标检测方面,目前的研究主要集中于船只的提取和识别,针对航标的提取研究较少.目前基于合成孔径雷达(synthetic aperture radar,SAR)图像的舰船检测已提出了许多检测算法[5-7],但是由于SAR影像幅度信息受噪声的影响,加之SAR影像特有的几何畸变(叠掩、透视收缩、多路径虚假目标等)特征等因素,SAR影像还难以实现航标级小目标的提取;随着高分辨率遥感卫星的不断发射,基于高分辨率影像的信息提取与目标识别已成为研究的热点,文献[8]采用基于轮廓的空间模型进行地理目标的提取;文献[9]根据空间相关性在水域分割的基础上通过选取种子再进行生长的方式检测舰船,但是由于航标较小,轮廓难以定位且空间相关性不强,因此文献[8-9]提到的方法不能用于航标等较小目标的提取;文献[10]利用舰船与水体的灰度差异再结合船体的形状特征对舰船进行检测,这种方法对航标的提取具有一定的借鉴作用.但现在专门针对遥感影像的航标目标的检测提取研究还较少.
航标的体积较小,以中国东部沿海地区航标为例,其直径2.4m,在0.6m的高分辨率影像上也不过4个像素左右,因此目标提取困难.同时水面受行船、风浪等影响,水面影像灰度局部反差较大,如风浪与行船尾迹中会出现阴影区域或局部亮点,这些对航标的提取会造成很强的干扰;另外水面漂浮物在影像上也表现出与航标相似的特征,也对航标的检测造成了极大的困难;此外当船停在航标附近时,检测出的航标与停船连为一体而无法被提取,此时容易出现漏检.鉴于航标的特殊性,舰船等小目标的识别方法不适用于航标的检测,但一定程度上可以借鉴.
本文中针对高分辨率影像研究了航标的提取方法,在单类支持向量机实现水陆分割的基础上,提出了基于灰度信息、自相关性及在线学习策略的航标提取算法.采用了2004年上海地区黄浦江QuickBird融合影像进行实验,验证了算法的可行性.
1 基于单类支持向量机的水陆分割
单 类 支 持 向 量 机 (one-class support vector machine,OCSVM),是支持向量机(support vector machine,SVM)的一类.与标准SVM 模型不同,OCSVM不需要每个待分类别的训练样本,只需要待识别类型一类的训练样本,因此在单类目标提取方面具有很强的适用性.文中高分辨率影像的水陆分割实质是水域的提取,由于陆地类别较多而水域类别相对单一,因此单类支持向量机适用于水陆分割.
OCSVM通过引入分类超平面和最大间隔的思想,在变换后的特征空间中尽可能地使正类落于分离超平面的一侧,使原点与其他类别落于另一侧.从而让正类样本和原点之间具有最大间隔.

式中:w是最优分类超平面系数权向量;ρ为最优超平面到圆点的距离阈值;φ(xi)为低维空间到高维空间的映射函数;ν∈(0,1)用来控制支持向量在训练样本中的比重;松弛变量ξi是目标函数的惩罚项.求解式(1)可以得到如下决策函数.

式(1)问题可转化为如下对偶形式:
其中αi,αj是多项式乘子,K(xi,x)=〈φ(xi),φ(x)〉是核函数,能够在低维空间计算高位空间的内积.对偶形式的决策函数为

2 基于目标特性和相关性编组的航标提取
水陆分割中只选择了水域作为分类样本,分类后所有与水域波谱相差较大的对象都将被分为非水域类.由于水域内轮船、航标、以及轮船尾迹等物体的存在,分类后的水域区会呈现许多的空洞.对分类结果的水域区域进行形态学开运算,在保证水域内空洞不被破坏的情况下尽可能消除边界错分点同时圆滑空洞边界以利于检测.通过空洞检测,将所有检测出的空洞作为航标的候选目标,本文采用一种两阶段方法进行提取.首先利用几何和灰度信息进行初步筛选,去除与航标相似度较小的干扰目标.然后对保留下来的候选目标利用相关系数进行编组,基于编组中包含的目标个数完成最终提取.
2.1 基于几何和灰度信息的目标初步提取
计算所有检测出的空洞的面积,剔除面积较小以及面积较大的明显非航标的目标.对于面积与航标接近的目标,利用目标窗口的灰度分布进行筛选.图1显示了水域内可探测的部分目标,包括船只、尾迹亮点,航标等.

图1 部分水域内可探测目标Fig.1 Parts of the detected object in water area
图2为航标及其四方向(过目标窗口中心点的水平、竖直、主对角线、反对角线)灰度变化图.由图2可以看出,航标阴影的存在,至少在两个方向上的图形上会同时出现波峰与波谷.图3为非航标干扰点及其四方向灰度变化图,可以看出干扰小目标的灰度分布无固定规律可寻.本文中,计算四条线上的最大值与最小值,再计算窗口中外围区域的灰度均值,得到最大值与均值的差值D1和均值与最小值的差值D2,如果D1和D2都大于给定的经验阈值则将目标保留,否则将其排除.
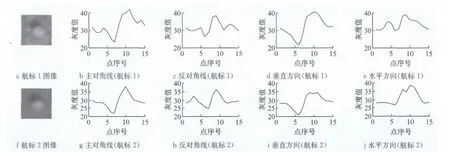
图2 航标及其四方向灰度变化图Fig.2 Navigation marks and gray variation diagram of four directions
基于灰度信息的航标提取是对目标的预筛选,不需要太严格的阈值,根据遥感影像上水体背景及目标的灰度初步估计出阈值,再将阈值适当放松以保证航标不被剔除.
2.2 基于相关系数编组的目标提取
由于影像覆盖区域相对于地球表面而言较小,同一幅影像上航标的阴影沿同一方向且阴影面积大致相同,因此具有很强的相关性.为此,计算候选目标的两两之间的相关系数,根据相关性对所有航标进行编组,在众多目标中,航标之间的相似性远高于航标与非航标及非航标与非航标之间的相似性,因此目标个数最多的编组最有可能是航标组.本文利用这一原理实现航标的编组提取.

图3 干扰点及其四方向灰度变化图Fig.3 Disturbance targets and gray variation diagram of four directions
考虑到候选目标的中心与实际航标中心的偏差,求取相关系数时采用设定容差值进行搜索计算的方法.具体为:假设待计算航标分别为A、B,对A开N1×N1的窗口a,对B开N2×N2(N2>N1)的窗口b,分别计算窗口b中所有N1×N1的窗口与窗口a在每个波段的相关系数,当b中存在与a在每一波段的相关系数都满足经验阈值(一般在0.6到0.8之间)的窗口时,认为A对B相似,同理可求B对A的相似性,若A对B相似且B对A相似时则认为A与B相似.研究中取航标实际大小与影像分辨率的比值作为容差值.
相关编组的确定流程如下:
步骤1:遍历候选目标,剔除与其他目标都不具有相关性目标,得到疑似航标序列;
步骤2:遍历疑似航标,对未遍历的航标建立新的相关组,标记该疑似航标已遍历,查找其所有相似的疑似航标,并添加到新组中;
步骤3:遍历新组中疑似航标,标记此疑似航标已遍历,将新组中未出现的与疑似航标相似的疑似航标添加到新组中;
步骤4:新组中所有疑似航标的相似航标均已在新组内,输出相关组.否则重复步骤3;
步骤5:所有航标均已被遍历,输出所有相关组.否则重复步骤2、3、4;
步骤6:将最大相关组作为航标组.
航标提取的流程如图4所示.
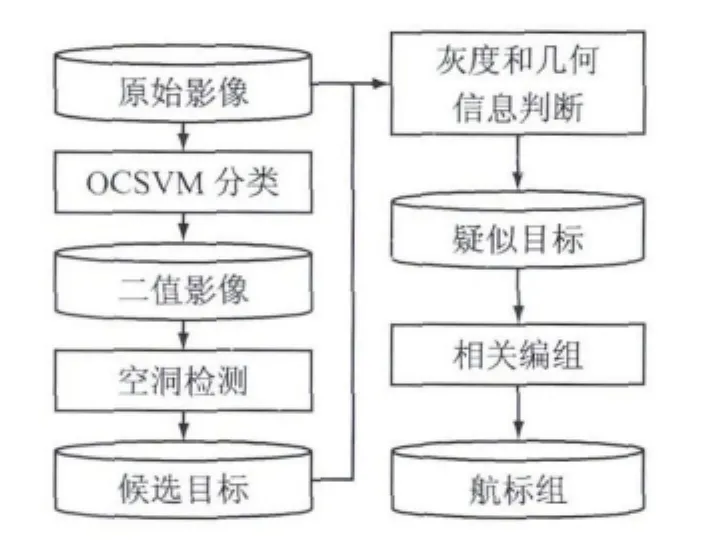
图4 航标提取的流程图Fig.4 Flow chart of detection
3 基于在线学习策略的漏检航标搜索
在相关系数编组提取过程中,往往选用较为严格的阈值以降低提取错误率,但这样也会导致部分航标的漏检.一般航标的布设满足一定的规律,并且间距大致相等.基于这一先验知识,本文提出一种基于在线学习原理的漏检航标检测算法,即首先依据已经检测得到的航标的空间分布对漏检航标的可能位置进行估计,再依据已检测到的航标的先验知识在估计位置进行精确检测.
考虑到水中航道线一般为平缓变化的曲线,本文中利用三次多项式对航标的分布曲线进行基于最小二乘原理的拟合,如式(5)所示.

根据拟合的曲线和已检测航标的分布间隔,估计是否存在漏检航标,对可能存在漏检的区域,基于已检测航标的图像多波段灰度特性进行搜索.为了加快搜索,对已检测航标进行信息约简,构建检测模板.
模版的构建方法:设已检测到有M个航标,每个航标有B个波段,航标窗口为N×N.分别对每波段取M个航标的像素值可得M×N×N的矩阵G:

矩阵G中g(i,j)表示第i个航标的第j个位置(沿水平方向顺序编号1到N×N)所在的灰度值.
对矩阵G中每列M个值取中值,将得到的N×N个中值作为模版在该波段的像素值.对B个波段的中值可得模版P:

矩阵P中p(i,j)表示第i个波段的第j个位置所在的灰度值.
利用式(7)所示的航标模板,在估计的疑似漏检位置进行匹配搜索,若有窗口在每个波段都具有满足阈值的相关系数,则将该窗口作为航标加以保留.
将检测到的漏检航标加入到已知航标中,更新曲线拟合结果和航标模板,进行迭代检测直至没有新的疑似漏检位置出现.
4 实验结果与分析
实验中选用2004年上海地区黄浦江QuickBird融合影像进行实验.融合影像由0.6m全色影像和2.4m多波段影像构成.
图5给出了上海市南浦大桥附近一个实验区域.影像大小为3000×3000pixel.图5a为此区域的原始影像;图5b为单类支持向量机分类后经过形态学对水域进行开运算处理后的二值图,其中白色区域为水域,黑色为非水域,1~8编号的圆圈为经过灰度判定后的疑似航标点.

图5 实验数据1(上海市南浦大桥附近)Fig.5 Dataset 1(near Nanpu Bridge in Shanghai)
实验中,共选择水体样本像素1 363个.对检测出的空洞进行面积筛选,考虑到在0.6m影像上直径2.4m左右的船标面积约为16(像素2),结合水陆分割精度影响,航标空洞面积一般在10到30之间,为保证航标不漏检,将空洞面积小于5及大于50的空洞全部予以排除,再进行灰度判定,符合条件的则定为疑似目标,如图5b中编号的1~8圆圈所圈位置.
对提取出的8个疑似目标进行两两自相关系数计算,取搜索窗口8×8,待搜索窗口为12×12,相似判断系数取0.7.最终得到的相关组为(1,3,4,5,6,7)、(2)、(8)其中2、8没有相关的疑似航标剔除.最后确定1,3,4,5,6,7号候选目标即为检测出的航标.
图6将提取出的航标分别在分类二值图与原始图上进行显示,对比结果表明,该实验区的6个航标都被提取出,没有漏检也没有虚警.高准确度的提取主要是因为该区域内航标四周空旷,没有停船也很少行船环境相对稳定,航标表现的特征明显、相似度高.
图7给出了另一组位于上海黄浦江复兴岛区域的实验数据,影像大小为3 000×3 000.图7a为原始影像数据;图7b为单类支持向量机分类后经过形态学对水域进行开运算处理后的二值图,其中白色区域为水域,黑色为非水域,1~16编号的圆圈为经过灰度判定后的疑似航标点.由图7b可以看出,由于航标周围停泊船只的存在,部分航标空洞与停船空洞连为一体,导致航标无法提取.
实验中,共选择水体样本像素1 725个.对检测出的空洞进行面积筛选,大于100的空洞全部排除,再进行灰度判定,符合条件的则定为疑似目标,如图7b.

图6 第1组实验数据提取结果Fig.6 Detection results of Dataset 1
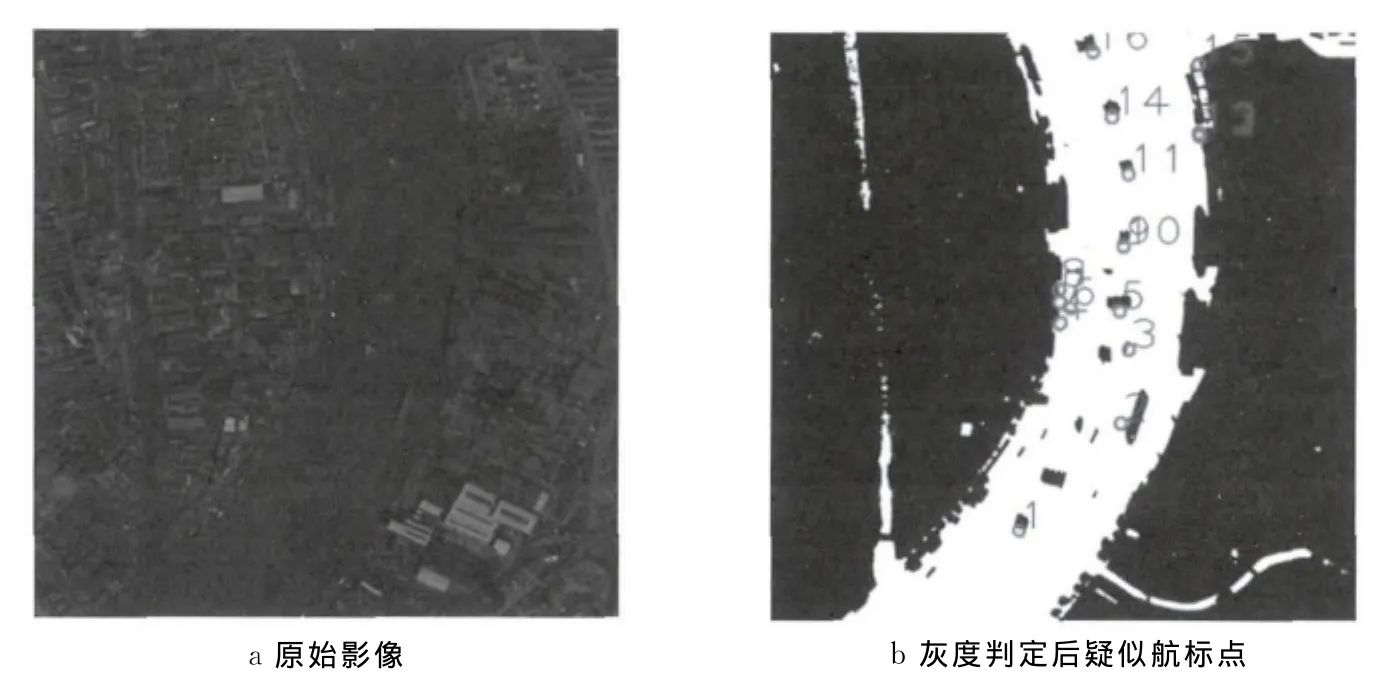
图7 实验数据2(上海市黄浦江复兴岛区域)Fig.7 Dataset 2(Fuxing Island Area in Shanghai Huangpu River)
对提取出的16个疑似目标进行两两自相关系数计算,取搜索窗口8×8,待搜索窗口为12×12,相似判断系数0.7.最终得到的相关系数相关组为(1,5,9,10,11,14,16)、(7,8)、(12,13)、(2)、(3)、(4)、(6),其中剔除2、3、4、6没有相关的疑似航标.最后确定1,5,9,10,11,14,16号候选目标即为检测出的航标.研究中,笔者发现,9航标与10航标实际为一个航标,是由分类过程中同一航标被分出两个空洞所致,针对这种情况,增加了距离差距判断,即认为当两个航标距离小于航标直径时认为两个航标为同一个航标.最大相关组(1,5,10,11,14,16).
图8将提取出的航标分别在分类二值图与原始图上进行显示,该区域共有9个航标,本算法检测出6个,没有虚警但存在漏检.出现漏检的主要是因为航标附近存在停船,当距离较近时无法区分.

图8 第2组实验数据提取结果Fig.8 Detection results of Dataset 2
利用已提取的航标和河岸对航标曲线进行拟合,得到的方程如下:

将曲线离散化后得到序列点,反算到原图像上如图9a所示.设已知航标点序号依次为1、2、3、4、5、9,未知航标点号依次为6、7、8,则各点间距见表1.

表1 航标间距Tab.1 Distance between two adjacent marks像素
对相邻四段求均值¯d与标准差σ得:¯d=328.9、σ=23.3.于是有航标点在沿曲线方向的点位标准差约为即16.5,根据统计学可得,航标会落在插值所得点为中心的100×100的窗口内逐像素查找航标点,可得最优点如图9b中蓝色点,此点即为漏检航标.
5 结论

图9 漏检航标检测Fig.9 Detection of the undetected navigation marks
本文针对高分辨率光学遥感影像,提出了一种航标的自动提取算法.在OCSVM对影像进行水陆分割的基础上,通过空洞检测,得到候选目标物的中心点坐标及空洞面积.针对候选目标,文中提出基于几何和灰度信息的目标提取、基于相关系数编组的目标提取和基于在线学习策略的漏检航标搜索等方法,分别对上海市南浦大桥区域及上海黄浦江复兴岛区域进行算法试验,完整地提取了两个区域的航标,验证了文中提出的方法的可行性.
基于学习策略的漏检航标搜索方法中,采用了三次曲线对航标的排列进行拟合,这种方法对河道较为平缓的区域效果较好,对几何形态较为复杂的河段不适用.针对复杂河段检测漏检航标的新方法正在研究中,不包含在此文内容之中.
[1] 何智勇,章孝灿,黄智才,等.一种高分辨率遥感影像水体提取技术[J].浙江大学学报:理学版,2000,66(8):991.
HE Zhiyong,ZHANG Xiaocan,HUANG Zhicai,et al.A water extraction technique based on high-spatial remote sensing images[J].Journal of Zhejiang University:Science Edition,2000,66(8):991.
[2] 翟辉琴.基于数学形态学的遥感影像水域提取方法[J].测绘科学,2006,31(1):22.
ZHAI Huiqin.A new algorithm for water area extracting from the remote sensing image based on morphologic method [J].Science of Surveying and Mapping 2006,31(1):22.
[3] LI Zhen,LIU Yongxue,LI Manchun,et al.Automatic waterline pick-up based on improved embedded confidence[C]//18th International Conference on Geoinformatics.Beijing:[s.n.],2010:18-20.
[4] Li Wenkai,Guo Qinghua,Elkan C.A positive and unlabeled learning algorithm for one-class classification of remote-sensing data[J].IEEE Transactions on Geoscience and Remote Sensing,2011,49(2):717.
[5] Eldhuset K.An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions[J].IEEE Transactions on Geoscience and Remote Sensing,1996,34(4):1010.
[6] HUAN Ruohong,YANG Ruliang.SAR target recognition based on MRF and gabor wavelet feature extraction[C]//IEEE International Geoscience and Remote Sensing Symposium,IGARSS 2008.Boston:IEEE,2008:907-910.
[7] HE Zhiguo,LU Jun,KUANG Gangyao.A fast SAR target recognition approach using PCA features [C ]//Fourth International Conference on Image and Graphics.Chengdu:[s.n.],2007:580-585.
[8] LI Yu,SUN Xian,WANG Hongqi,et al.Automatic target detection in high-resolution remote sensing images using a contour-based spatial model[J].IEEE Geoscience and Remote Sensing Letters,2012,9(5):886.
[9] WU Wei,LUO Jiancheng, QIAO Cheng,et al.Ship recognition from high resolution remote sensing imagery aided by spatial relationship[C]//IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services.Fuzhou:IEEE,2011:567-569.
[10] 汪闽,骆剑承,明冬萍.高分辨率遥感影像上基于形状特征的船舶提取[J].武汉大学学报:信息科学版,2005,30(8):685.
WANG Min,LUO Jiancheng,MING Dongping.Extract ship targets from high spatial resolution remote sensed imagery with shape feature[J].Geomatics and Information Science of Wuhan University,2005,30(8):685.
