客车旁通流量控制式ECHPS系统仿真与台架试验
2014-05-09宋海兵江浩斌耿国庆
王 新,宋海兵,江浩斌,耿国庆
传统的液压助力转向系统(Hydraulic Power Steering,简称为HPS)具有以满足车辆原地转向或低速急转向时的操纵轻便性为主的单一助力特性[1],因此,当大客车高速行驶时,由于转向阻力矩的减小,导致转向助力相对过大,令驾驶员感觉转向盘路感不足而使车辆操纵稳定性下降。为了克服液压助力转向系统的不足,人们在液压助力转向系统中加装了电子执行机构或辅助装置[2-3],根据车速(也有采用车速和转向盘转速)来控制液压系统的流量或压力,这类系统称为电动液压助力转向系统(Electrical Hydraulic Power Steering,简称为EHPS)。电动液压助力转向系统主要有电控液压助力转向系统(Electrical Controlled Hydraulic Power Steering,简称为ECHPS)和电动油泵式电控液压助力转向系统两类。
作者拟研究一种通过控制液压系统流量改变助力特性的流量控制式ECHPS系统。该系统是在HPS基础上增设控制旁通流量的电液比例阀及控制装置,系统的动力仍然由发动机提供,以期适合前轴负荷较大的车辆。
1 流量控制式ECHPS系统工作原理
流量控制式ECHPS系统结构如图1所示。电液比例阀安装在通向动力缸活塞两侧的油道之间。当驾驶员转动转向盘时,电控单元ECU通过采集车速和转向盘角速度信号,按照预先设定的程序,发出控制信号给电液比例阀,以控制比例阀的开度,从而控制旁通流量,继而改变助力大小。车速越高,电液比例阀的开度越大,转向助力越小。
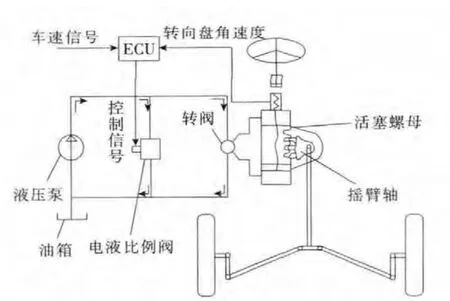
图1 ECHPS系统结构组成示意Fig.1 Structure of ECHPS system
根据图1,得到助力油压[4]为:

式中:Δp为助力油缸两端压差即工作压力,Pa;ρ为液压油密度,kg/m3;Q 为液压泵提供的流量,L/min;Cd为流量系数;z为转向控制阀的并联进油口数目;A为转向控制阀单边有效节流面积;Ae为比例阀的有效节流面积,m2。
2 建立ECHPS系统模型
2.1 基于AMESim,建立ECHPS系统模型
ECHPS系统在AMESim中的模型如图2所示,主要包括:驾驶员手力、转向盘、扭杆、转阀、电液比例阀、转向器、控制器及油泵等部分。
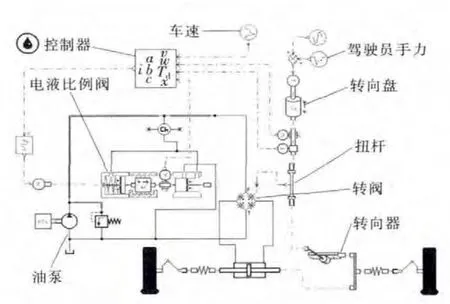
图2 ECHPS系统的AMESim模型Fig.2 Model of ECHPS system in AMESim
1)驾驶员手力及转向盘模型
驾驶员手力模型:采用正弦曲线信号模块和分段线性信号模块,模拟手力大小。通过设置参数,得到不同形状、频率和幅值的力矩信号,并输出到转向盘模型。
转向盘模型:采用扭矩转换器和旋转负载模拟,输出扭矩给扭杆。转向盘模型还带有转角速度传感器和扭矩传感器,传感器分别将测量的转向盘角速度和扭矩传递给控制模型。
2)扭杆与转阀模型
扭杆模型:采用扭转弹簧和角度传感器模拟。扭转弹簧接收转向盘模型传过来的扭矩而变形,将上、下端两角度传感器输出信号之差作为扭杆变形量信号,再把该信号传输给转阀模型。
转阀模型由4个节流阀模拟。上端接高压油路,下端接回油路,左端接助力油缸左室,右端接助力油缸右室。转阀根据扭杆变形量信号控制节流阀开度,两者关系采用文献[5]中的研究成果。
3)电液比例阀模型
采用HCD库中质量模块、阀芯模块、活塞模块、函数模块、位移传感器模块及力转换模块等,建立电液比例阀模型。用质量模块模拟阀芯质量,其位移表示阀芯的位移,并由位移传感器测量。用函数模块计算电磁力(只计算出结果,无量纲),用力转换模块将无量纲电磁力转换为阀芯受到的电磁力。
电液比例阀模型如图3所示。端口1为进油口,接高压油路;端口2为回油口,接油箱;端口3和4分别接控制模型的输入和输出。端口3将测量的阀芯位移传给控制器模型,端口4接收控制模型的输出电流,经运算得到电磁力,力转换模块再将电磁力加载到阀芯上。

图3 电液比例阀模型Fig.3 Model of electro-hydraulic proportional valve
4)转向器模型
转向器模型包括齿轮齿条模型、助力油缸模型及轮胎模型。齿轮齿条模型与扭杆相连,助力油缸与转阀相连,轮胎模型模拟转向阻力。其中,轮胎模型由质量模块、弹性阻尼模块及函数模块模拟,利用质量模块的质量和滑动摩擦力模拟转向车轮载荷及转向阻力所确定的作用于助力油缸上的阻力,函数模块根据不同车速计算得到相应的转向阻力。
齿条上的等效阻力[6]为:

5)控制模型
控制模型采用AMESim和MATLAB/Simulink接口图标模块模拟,输入为车速、转向盘角速度、转向盘扭矩及比例阀阀芯位移,输出为控制电流,接电液比例阀。它是实现车速、转向盘角速度、转向盘转矩及阀芯位移与电液比例阀电流之间关系的控制算法。具体控制策略在Simulink中建立。
2.2 控制策略制定及建立模型
由于行车转向时转向阻力矩随车速的增大而减小[7],因此转向助力会随车速的增大而减小。为保证助力跟随性,转向助力会随转角速度的增大而增大。考虑到紧急避险工况下需要瞬时提供较大助力这一状况,制定了基本助力控制与附加力矩控制相结合的控制策略。为提高系统响应速度,设计了前馈补偿PID控制算法。
ECHPS系统控制如图4所示。控制过程为:ECHPS系统的控制单元根据扭矩传感器和车速传感器的信号,按照基本助力控制,计算出目标助力油压。经过计算模块,得到阀芯目标位移。运用前馈补偿PID算法,实现对阀芯位移的闭环控制。经过计算阀芯目标位移,得到目标电流。同时,由传感器采集的车速和转向盘角速度信号确定的附加力矩控制,计算出附加电流,将目标电流与附加电流叠加的电流输出给电液比例阀。
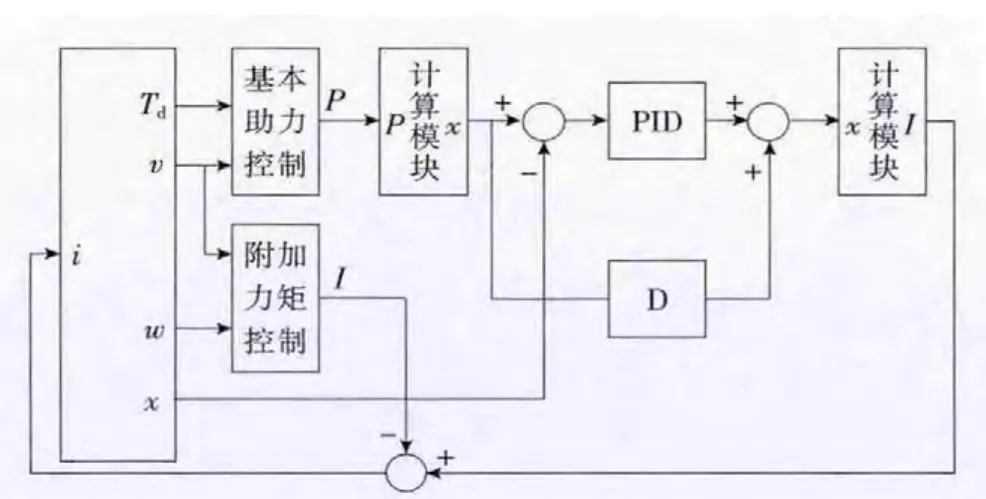
图4 ECHPS系统控制框图Fig.4 ECHPS control block diagram
按照理想助力特性曲线的要求[8],基于某大客车设计的ECHPS系统助力特性曲线如图5所示。基本助力控制就是按照助力特性曲线,提供转向助力。
基于车速和转向盘角速度制定的附加力矩控制策略如图6所示。这里采用逻辑门限值控制,其特点是不需要建立具体系统的数学模型,并且对系统的非线性控制非常有效,适用于各种工况的控制[9-11]。设定附加力矩的车速门限值为50km/h和80km/h,转向盘角速度逻辑门限值为200°/s和500°/s。I1~I4表示在某一车速下附加助力控制对应最大电流,ω0和ω1分别代表两个角速度的门限值。可以看出:当车速大于50km/h且角速度大于ω0时,附加力矩控制才起作用;某一车速下当转向盘角速度大于ω0时,随着角速度的增大,附加力矩控制的电流增大,则比例阀电流减小,系统助力增大;当角速度大于ω1时,此时附加电流达到最大,比例阀电流减到最小,系统提供最大的助力;在相同的角速度下,车速越大,附加力矩控制的电流越大。
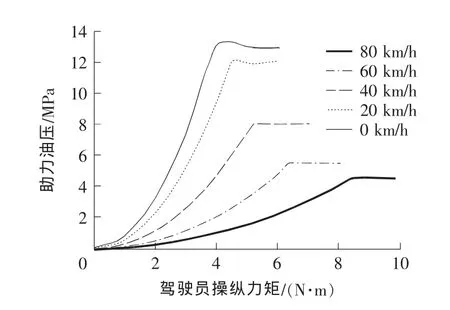
图5 不同特征车速下助力特性曲线Fig.5 Assist characteristic curves of different characteristic speeds
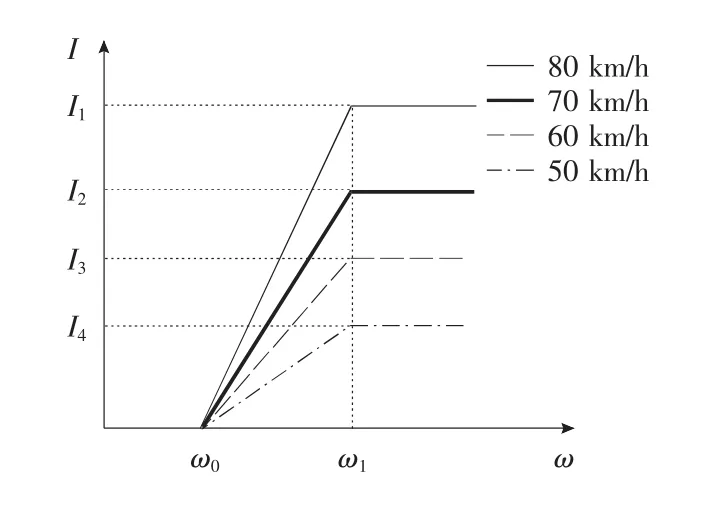
图6 附加力矩控制策略Fig.6 Additional torque control strategy
ECHPS系统控制器在Simulink中的模型如图7所示。输入信号分别为驾驶员操纵力矩、车速、转向盘角速度及阀芯位移。由驾驶员操纵力矩和车速输入信号按照基本助力控制模式计算出目标助力油压,后转化为阀芯的目标位移,再与阀芯反馈位移比较,运用前馈补偿PID算法,得出阀芯理想位移,继而得到理想电流,理想电流与附加电流叠加,最终得到比例阀控制电流。
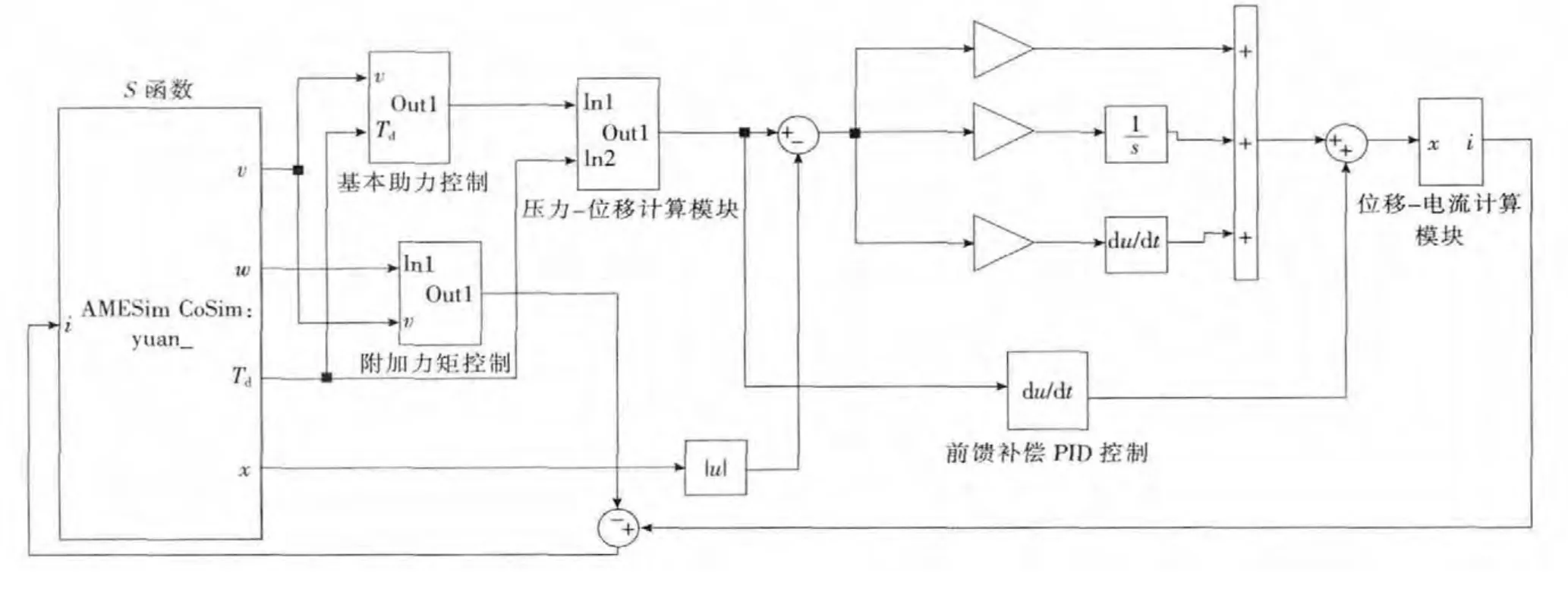
图7 ECHPS系统控制器在Simulink中的模型Fig.7 Model of ECHPS controller in Simulink
3 ECHPS系统性能仿真
以6120G22A大客车为研究对象,其HPS系统的主要参数为:前轴载荷65kN,胎压0.8MPa,液压泵流量18L/min,助力油缸内径105mm,活塞行程370mm。
3.1 不同车速下的电液比例阀响应和助力特性
驾驶员手力正弦输入,幅值6N·m,周期4s,得到低速(20km/h)、中速(40km/h)及高速(80km/h)下电液比例阀电流曲线及助力特性曲线,分别如图8,9所示。
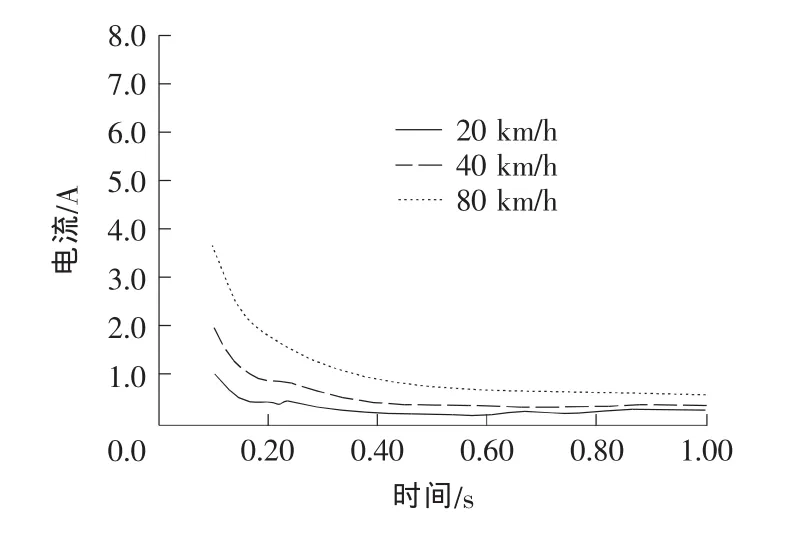
图8 三种车速的电液比例阀电流曲线Fig.8 Current curve of electro-hydraulic proportional valve under three vehicle speeds

图9 三种车速的助力特性仿真结果Fig.9 Assist characteristics curves of the ECHPS system
仿真结果表明:
1)比例阀电流随车速的增大而增大,助力随车速的提高而逐渐减小。由于转向阻力矩随车速的增大而减小,因此系统提供的助力会随车速的增大而减小,比例阀电流会随车速的增大而增大;低速转向时助力较大,满足了转向轻便性要求,中、高速转向时助力较小,满足了良好“路感”要求,有利于提高车辆操纵的稳定性。
2)由于加入了控制策略,比例阀电流在逐渐稳定的过程中变化小,最终在0.8s达到稳定。
3)图8中电流在0时刻附近较大,这一现象由控制模型中计算导致。在助力油压到阀芯位移的计算模块中,通过式(1)计算比例阀节流面积时,目标油压在0时刻为0MPa,此时,得到的比例阀节流面积最大,由此计算得到的电流也超出了实际值很多,该处仿真结果可不予考虑。
3.2 附加力矩控制仿真
假设车辆以60km/h直线行驶,突遇前方障碍物。驾驶员给方向盘施加一个力矩阶跃信号,反应时间为0.5s。当方向盘转速分别为150,300和400deg/s时,比例阀阀芯位移响应如图10所示。

图10 不同方向盘转速下的阀芯位移响应Fig.10 Spool displacement response at different rotation speed
在附加力矩控制范围内,即车速v>50km/h且方向盘转速w>200deg/s,在某车速转向时,随着方向盘角速度的增大,阀芯位移逐渐减小,则比例阀旁通流量减小,使得进入转阀的流量增加,助力油压增大,提高了紧急大转速转向下的助力跟随性。
4 台架试验
将研制的电液比例阀安装到GY110型循环球转向器上,依次连接信号发生器、示波器、控制器及电液比例阀电磁线圈,在液压助力转向器性能试验台上进行ECHPS台架试验。信号发生器模拟车速,示波器显示实时电流,控制器包含电源模块、车速处理模块、CPU模块和电磁阀驱动模块。试验测得车速分别为20,40和80km/h的助力特性如图11所示。
图9与图11对比得出:
1)仿真和试验的饱和区最大压力及相应的驾驶员操纵力矩一致。
2)随着车速的提高,助力特性曲线上升幅度渐缓。低速行车转向时,压力能在瞬间快速上升,表示系统助力跟随性较好,有利于保证低速转向轻便性;高速行车转向时压力上升缓慢,有利于保证良好“路感”,防止转向“发飘”,车辆操纵稳定性好。

图11 3种车速的助力特性试验结果Fig.11 The test of assist characteristics curves of the ECHPS system
5 结语
利用AMESim和Simulink软件,建立了大客车旁通流量控制式ECHPS系统的模型,并进行了仿真分析。研究了ECHPS系统控制策略,搭建并完成了ECHPS台架试验。仿真与试验结果表明:助力特性曲线一致,验证了所建模型的正确性及所设计控制策略的有效性,且系统具有良好的助力跟随性,可满足低速转向轻便性和高速操纵稳定性的要求,为大客车ECHPS的产品研究开发及应用打下了重要基础。
(
):
[1] 刘振成.中型载货汽车转向系统的分析研究与改进设计[D].长春:吉林大学,2011.(LIU Zhen-cheng.Analysis and study on the improved design of the steering for the medium truck[D].Changchun:Jilin University,2011.(in Chinese))
[2] 霍立志.拖拉机电液助力转向系统的研究与仿真[D].杨凌:西北农林科技大 学,2010.(HUO Li-zhi.Study and simulation of electro-hydraulic power steering system for tractors[D].Yangling:Northwest A & F University,2010.(in Chinese))
[3] 李红海.汽车电控液压助力转向系统电子控制系统研究[D].重庆:重庆交通大学,2010.(LI Hong-hai.Research of electric hydraulic power steering system electronic control system for automobile[D].Chongqing:Chongqing Jiaotong University,2010.(in Chinese))
[4] 刘亚辉,高峰,季学武.前置稳压阀对ECHPS助力特性的影响[J].北京航空航天大学学报,2008,34(11):1247-1249.(LIU Ya-hui,GAO Feng,JI Xue-wu.Influence of constant pressure valve on boosting char-acter of by-pass flow type ECHPS[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(11):1247-1249.(in Chinese))
[5] 江浩斌,杨兆永,耿国庆,等.重型车辆流量控制式ECHPS系统建模与仿真[J].计算机仿真,2012,29(11):365-369.(JIANG Hao-bin,YANG Zhaoyong,GENG Guo-qing,et al.Modeling and simulations of bypass flow-controlled ECHPS applied in heavy-duty vehicles[J].Computer Simulation,2012,29(11):365-369.(in Chinese))
[6] 周小健,高翔,沈则方.基于AMESim与Simulink的电动液压助力转向系统的联合仿真[J].拖拉机与农用运输车,2010,37(3):20-22.(ZHOU Xiao-jian,GAO Xiang,SHEN Ze-fang.Co-simulation study of electro-hydraulic power steering system based on AMESim and Simulink[J].Tractor & Farm Transporter,2010,37(3):20-22.(in Chinese))
[7] 日本自动车技术会.汽车工程手册[M].北京:北京理工大 学 出 版 社,2010.(Society of Automotive Engineering of Japanese Incorporation.Automotive technology handbook[M].Beijing:Beijing Institute of Technology Press,2010.(in Chinese))
[8] 赵世强.商用车循环球EPS试验台开发与研究[D].长春:吉 林 大 学,2011.(ZHAO Shi-qiang.Development and research on the test bench for recirculating ball-type EPS of commerical vehicles[D].Changchun:Jilin University,2011.(in Chinese))
[9] Haggag S,Alstrom D,Cetinkunt S,et al.Modeling,control and validation of an electro-hydraulic steerby-wire system for articalatied vehicle applications[J].IEEE/ASME Transactions on Mechatronics,2006,12(1):688-692.
[10] 陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报,2006,22(10):122-125.(CHEN Wen-liang,XIE Bin,SONG Zheng-he,et al.Electro-hydraulic power steering fot tractors[J].Transactions of the Chinese Society of Agricultural Engineering,2006,22(10):122-125.(in Chinese))
[11] 赖宋红,熊四昌,袁月峰.汽车电动助力转向器的控制器研发[J].自动化仪表,2009,30(4):76-78.(LAI Song-hong,XIONG Si-chang,YUAN Yuefeng.Research and development of the controller of electric power steering system[J].Process Automation Instrumentation,2009,30(4):76-78.(in Chinese))
