基于Rao-Blackwellised粒子滤波的岩石声发射信号去噪
2014-05-09凌同华刘伟宏吴联迎
凌同华,刘伟宏,朱 亮,吴联迎
在岩石声发射的信号处理中,信号去噪是最基础、也是最关键的一项工作。目前,信号去噪处理的方法主要有两种:频域和时间-空间域分析方法。假设噪声和期望信号成分在频域范围内相互不重叠,可以通过频域方法滤除噪声(如:高通滤波、带通滤波及带阻滤波等)。例如:白噪声分布于整个频域范围内,传统的频域方法已经不能清除噪声成分。相反,一种基于噪声统计特性的状态空间方法被用来去除噪声成分。在时域上建立起来的常用滤波有:维纳滤波、卡尔曼滤波[1-2]及扩展卡尔曼滤波等。维纳滤波局限于处理线性平稳静态过程,并具有很好的效果。卡尔曼滤波常被用于处理非静态过程的信号。当需要确保滤波精度时,动态系统需满足线性且噪声服从高斯白噪声分布。另外,扩展卡尔曼滤波已被用来处理非线性系统,但对预测状态的估值问题仍需线性化处理,噪声要求服从高斯分布。
近几年,迅速发展起来的粒子滤波[3-5](Particle Filter,简称为PF)是一种基于蒙特卡罗的非线性、非高斯系统状态估计的滤波方法,完全突破了卡尔曼滤波理论框架,对系统的过程噪音和量测噪音不加任何限制。在PF基础上,作者拟提出Rao-Blackwellised 粒 子 滤 波 (Rao-Blackwellised particle filter,简称为RBPF)来加强岩石声发射信号采集质量。
1 粒子滤波
从动态系统中获取信息和估计系统的状态,建立一个精确的模型是至关重要的。大多数物理现象服从随机分布,其状态可以用有限维向量描述,并通过向量差分方程来模拟。建立PF系统模型,至少需要两个方程:①状态方程,用于描述系统状态随时间演变的过程;②观测方程,用于将系统在某时刻的输出和系统的状态联系起来。

式中:Xk,Yk分别为动态系统在k时刻的状态向量和观测向量;f 为状态函数;h为观测函数;Wk-1,Uk分别为状态过程和观测过程的噪声。
粒子滤波算法流程如图1所示,其详细过程见文献[3,4]。
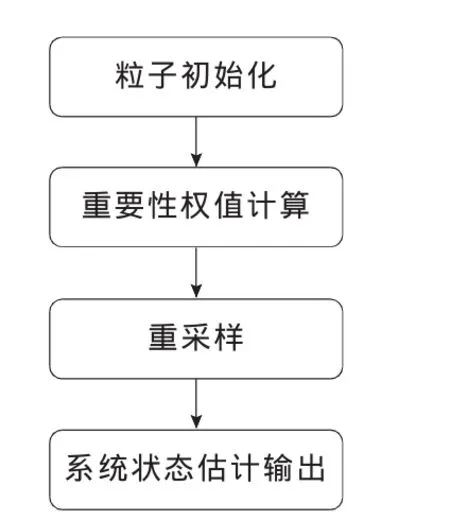
图1 PF算法流程Fig.1 Flow chart of PF algorithm
2 Rao-Blackwellised粒子滤波
2.1 RBPF方法
由于声发射信号的采集频率比较高(通常在兆赫兹以上),粒子滤波需要大量的样本点来组建后验概率分布,使计算效率下降。尤其在高维状态空间和实时监控应用中,计算效率下降较明显。为实现粒子滤波在实时声发射监控中应用,采取具有降维作用的 RBPF[6-9]。
RBPF将标准状态空间向量xk分解成两个子空间,其中一部分x1k可以通过卡尔曼滤波进行分析解计算;而另一部分x2k可通过粒子滤波计算,并使其计算的复杂程度大大降低。RBPF的目的就是用较少的粒子获取同样的估计精度,从而降低计算量,实现其成本的节约与推广应用。基于两个子空间所构成的条件概率,并对其进行推演:
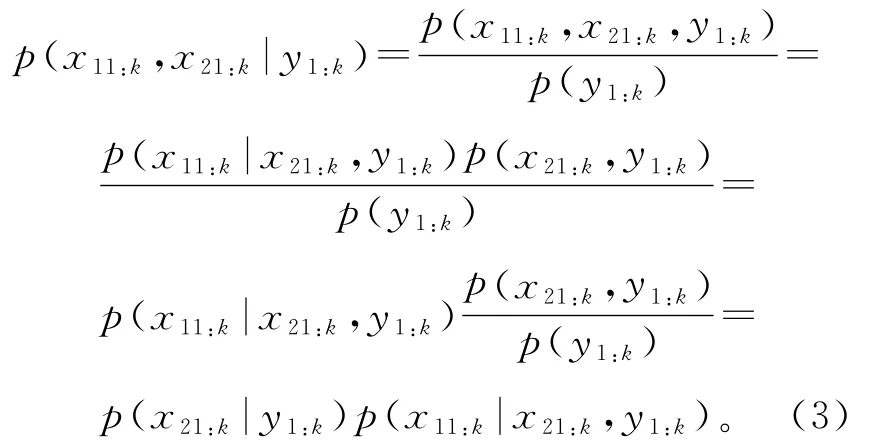
式中:p(x21:k|y1:k)为x21:k的后验概率密度函数。
如果p(x11:k|x21:k,y1:k)服从条件线性高斯分布,则可通过卡尔曼滤波实现其最优估计。因此,由两个子空间构成的后验概率密度函数通过运用粒子滤波估计时,仅需考虑与x21:k相关的一部分。RBPF可以看成是卡尔曼滤波与粒子滤波的结合体,是一种加强的粒子滤波。
2.2 RBPF实时处理特征
RBPF是一种状态空间时域的滤波技术,每次输入一个新的数据算法立即更新。在更新过程中,RBPF不依赖于全部已输入的信号序列,仅需考虑前一时刻的数据。因此,在采集过程处理信号时,对采集数据长度和采样频率没有特殊要求,此外,RBPF在计算过程所需存储数据的空间将大大降低,其运算速度获得较大的提高。断铅试验常被用来模拟声发射源,断铅试验中采集的声发射信号如图2所示。从图2中可以看出,滤波效果不受采集数据长度的影响。RBPF进行信号去噪处理时不受将来采集数据的干扰,仅与当前时刻及前一时刻所处的状态有关。传统的滤波器不具有这一特征,在滤波过程中需要完整的数据链。由于RBPF有实时在线处理功能,并能处理高维的非线性非高斯系统,而备受研究者的关注。
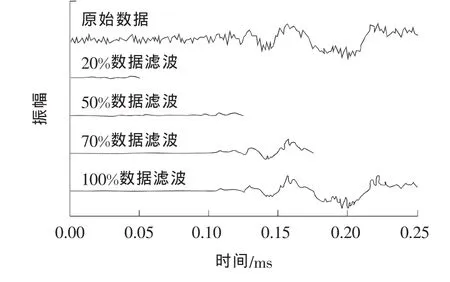
图2 RBPF实时处理信号滤波的特征Fig.2 The real-time processing feature of RBPF based signal filtering
3 RBPF在声发射信号去噪中应用
3.1 状态空间模型的建立
由于地震波信号与声发射信号具有相似性,地震波模型可以成为合适的候选对象来代表结构中的声发射事件。其模型为:

式中:A1(t-t0)为声发射源波形的振幅;t0为波形到达时间;ω为主导角频率(ω=2πf)。
在处理地震数据中,类似的方法被其他学者采用,地震波的振幅可用随机过程X1(t)表示,同时地震波用随机过程Xw(t)表示,则该过程可以改写为:

式中:δ(t)为相位角。
由于高斯-马尔卡夫(Gauss-Markov)过程能用来模拟许多物理现象,其中也包括模拟地震波的振幅X1(t),其离散形式为:

假定状态空间的噪声部分也可用高斯-马尔卡夫过程代替,其表达式为:

式中:aX2,bX2均为高斯-马尔卡夫过程的参数;w2与w1相互独立。
这些方程中涉及的参数可通过声发射信号的噪声部分确定。
利用模型式(6),(7),声发射的状态空间系统可以构造为:
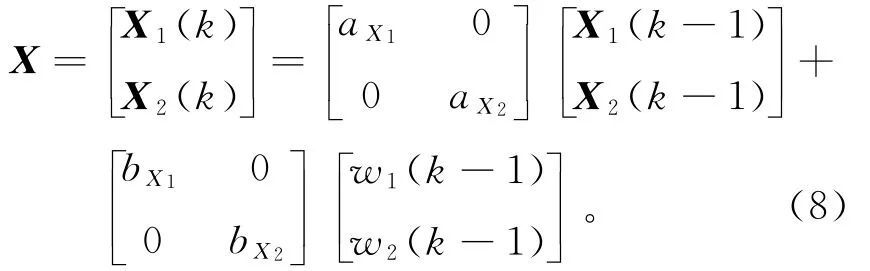
此外,其量测方程构造为:
式中:ωk为第k时间步长的主频率;vk为量测噪声。
式(8),(9)可分别用简化的矩阵形式表示为:

由于没有固定的主导角频率,通过运用频率粒子集[ωik]Mi=1,会比运用具体指定的频率有更高的估计精度。在研究中,每一个粒子的动态函数和量测函数分别为:

从式(12),(13)可知,每一个粒子的状态和量测函数均为线性。从另一个角度来说,本研究提出了用RBPF的方法来估计声发射信号,即由标准卡尔曼滤波处理状态更新,同时利用粒子滤波处理非线性的量测函数。
3.2 基于声发射信号去噪的RBPF算法
完整RBPF算法的步骤为:
1)卡尔曼滤波初始化:X1(0)=0,X2(0)=Y0;误差协方差在实验过程中,发现:R选择相对较大值时,能得到一个较满意的结果;递推过程收敛时,R的选取对滤波结果影响甚小。
2)状态估计预测和误差协方差预测:
3)粒子更新:
①采样ωik~p(ωk),zik=sin(ωikkΔ),i=1,2,…,M;
②计算外推量测估计和方差:
式中:Rk为量测函数中观测噪声的方差,即vk~(0,Rk)。
③计算预测密度:

④计算每个粒子的重要性权重:

⑥更新量测矩阵:G~k=[1 z~k]。
8)设定k=k+1,回到步骤2)。
针对算法中出现的参数,需要说明:
Φk-1能够根据状态函数的先验知识设定初值,Φk-1可分两种情况考虑:①时变性,即随时间需要更新或传递;②时不变性。在岩石冲击声发射实验中,由于实验环境相对较简单,且RBPF用于声发射信号去噪目前处于探索性阶段,因此仅考虑时不变性,设定,其中:a1,a2均为高斯-马尔卡夫过程中的参数,详细的解释可参考式(6),(7)。a1,a2合适的取值可以从信号的噪声部分(没有目标信号参与进行采集)和附有噪声的信号序列中获取。
Qk-1为状态过程噪声的协方差,其表达式为:

假定噪声的方差为时不变随机过程,那么,Qk-1为固定值Q。Q矩阵可通过信号的噪声部分初始化,确定Q的步骤为:①采集没有目标信号参与的噪声信号,即采集周围噪声;②计算采集噪声信号的自相关性;③利用模型σ2e-β|τ|对自相关数据进行拟合,其中:σ,β均通过回归分析确定。
利用该方法可获得σX2和βX2。在探讨过程中,观测噪声的方差假定为相对较小的常数。
3.3 RBPF仿真实验
为检验RBPF的滤波效果,借助于Matlab对其进行仿真模拟。首先需要构造一个不受噪声污染的原始信号作为标准信号,便于与其加噪处理后进行滤波所得结果比较。为验证RBPF处理噪声信号的效果,需对原始信号(如图3(a)所示)加入高斯密度分布的噪声,其附加噪声的方差为0.2,附加噪声的信号如图3(b)所示。对加噪信号运用RBPF进行滤波处理,处理后的信号如图3(c)所示。
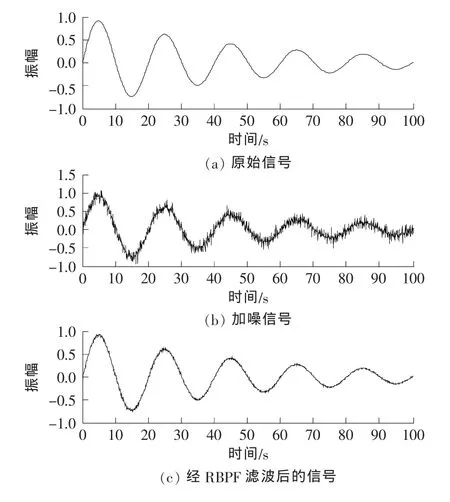
图3 仿真结果Fig.3 Simulation results

从图3中可以看出,RBPF在信号去噪处理中能获得较好的滤波效果。
3.4 RBPF在声发射信号去噪中应用
试验数据来源:利用SHPB系统对两组石灰岩进行冲击荷载作用下声发射试验,具体试验装置如图4所示。采集两组声发射数据X11和X21,在采集过程中有噪声干扰,利用本研究提出的RBPF处理采集的声发射数据,对应的去噪信号分别为X21和X22,经RBPF后的结果如图5所示。
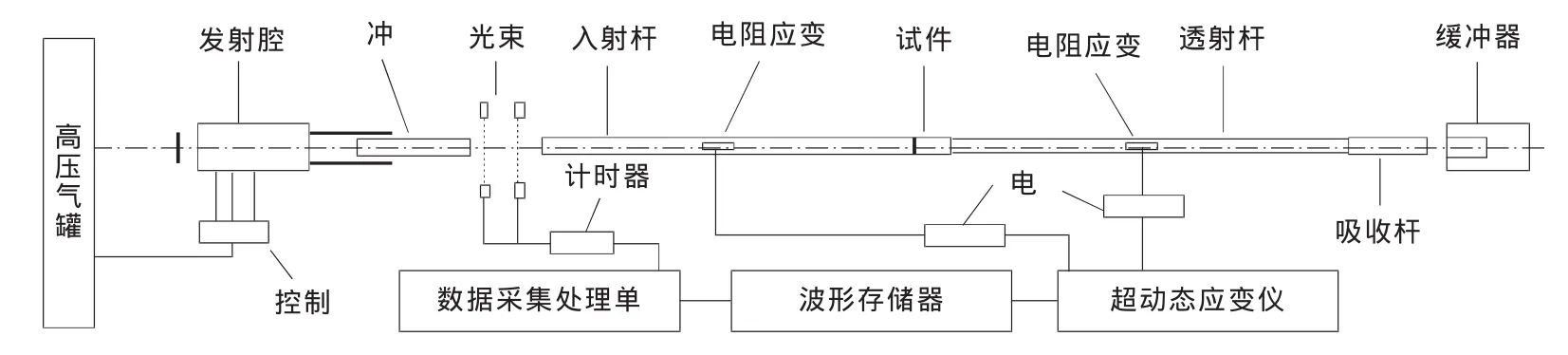
图4 SHPB测试系统Fig.4 SHPB testing systems
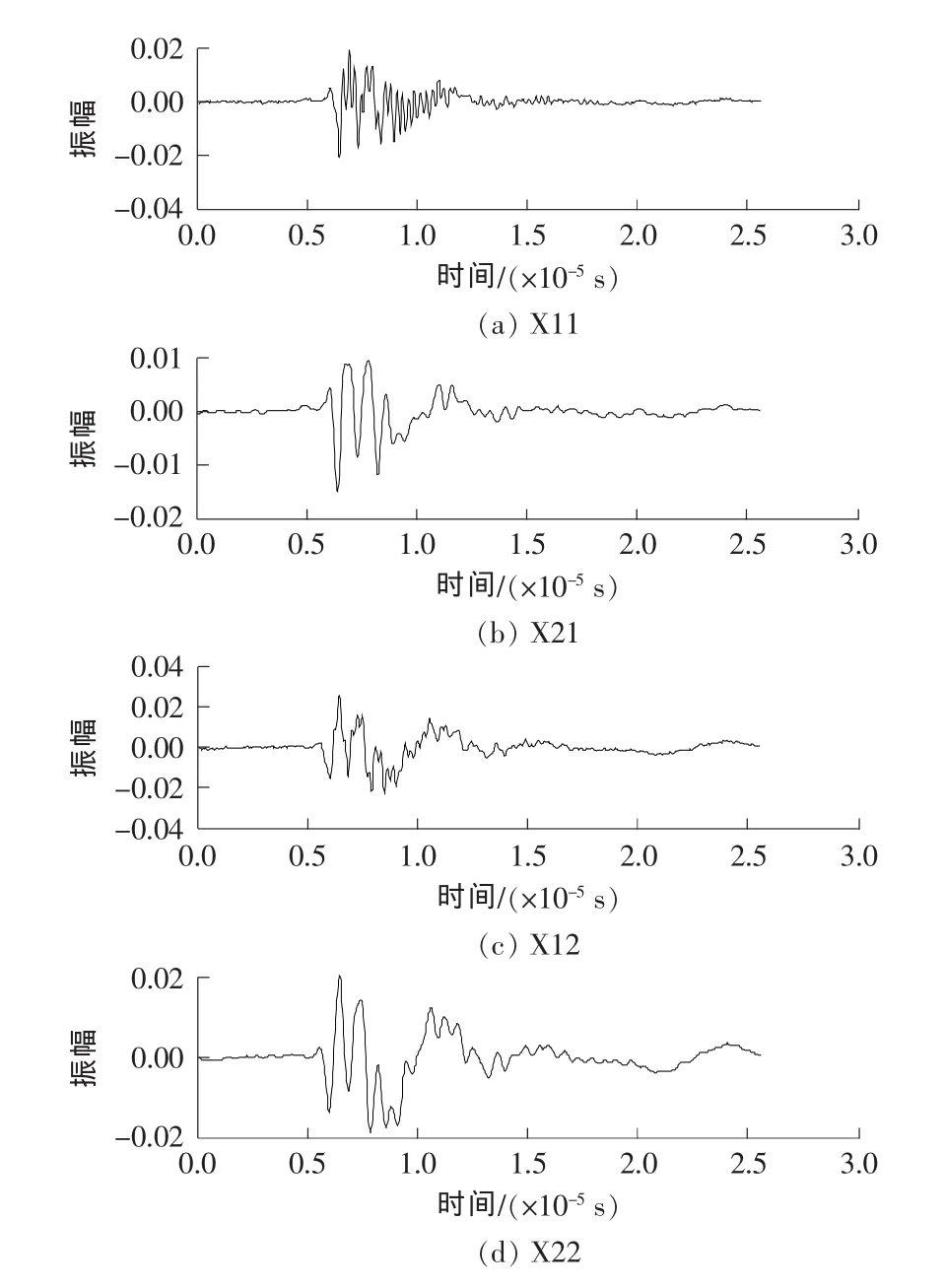
图5 X11和X21为原始信号,X12和X22为其对应的去噪信号Fig.5 X11and X21as original signals,X12and X22as corresponding denoising signals
在处理两组声发射数据时,粒子总数取200,噪声按高斯-马尔卡夫过程模拟,计算时间常数Tc=4.5×10-4ms,方差σ=6.7×10-3v2。声发射源的采样频率40MHz,并遵循假设:开始波形的振幅为零,X1(1)=0;第一个测量值y1设定为噪声,即X2(1)=y1。
为进一步分析声发射数据并检验RBPF的效果,利用FFT求出图5中各信号的频谱图,如图6所示。从图6中可以看出,X11最大振幅所对应的频率分别为0.15,1和3MHz,而X21最大振幅所对应的频率分别为0.15和1MHz。X21在0.15和1MHz对应的幅值分别高于X11所对应的点,而在3MHz时,两者相差不大,甚至低于X11的,在3MHz出现的现象由噪声所致。通过RBPF对原始信号进行去噪,发现两者在3MHz的幅值都趋于零。可见,RBPF在处理声发射信号中具有很大的潜力。
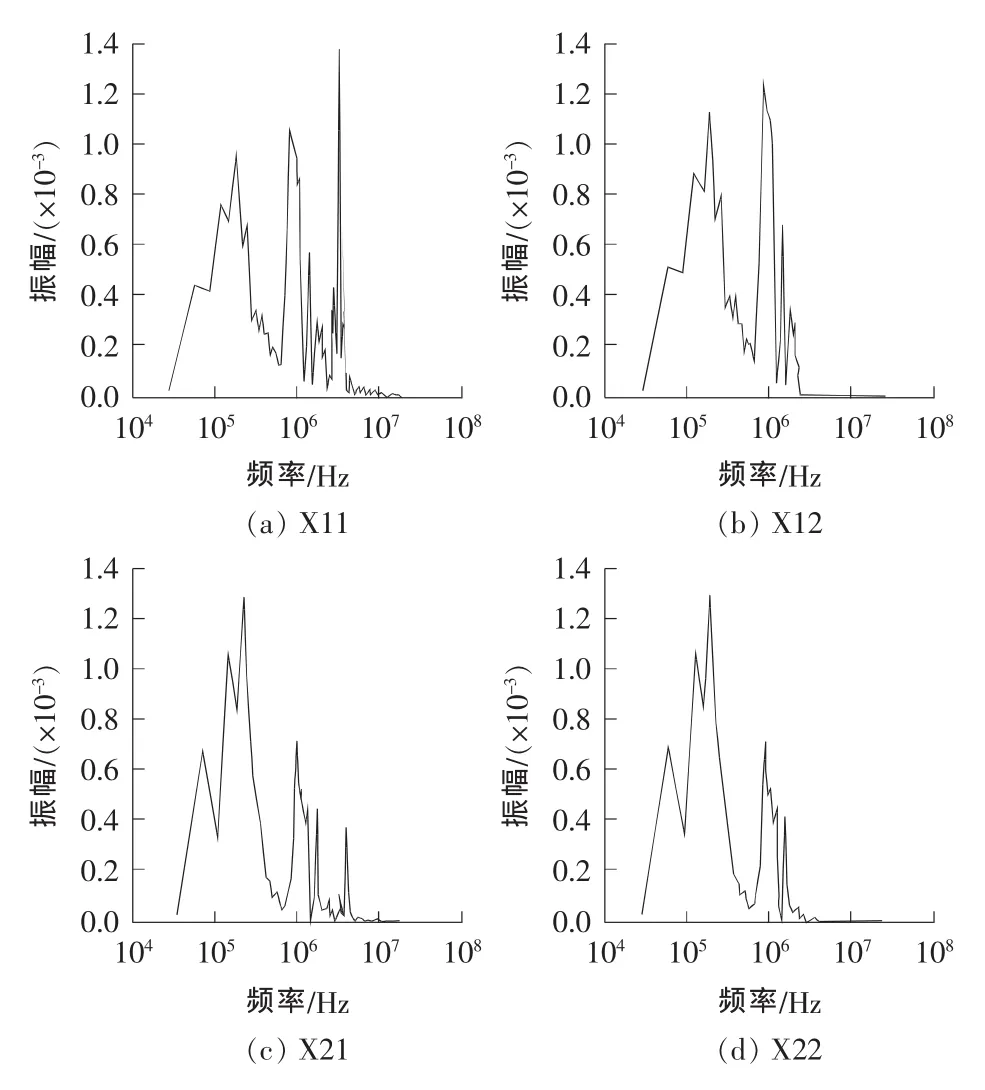
图6 图5中对应信号的频谱Fig.6 Spectrogram of the corresponding signal in Fig.5
4 结论
本研究提出了一种时空滤波方法RBPF,并对声发射信号进行去噪处理。通过合理选择模型参数,由实验结果验证了RBPF能够加强声发射信号的信噪比,并保留其主要频率成分。实验中还发现,冲击荷载作用下石灰岩最大振幅所对应的频率为0.15和1MHz,这对爆破与机械震动作用下的声发射监控有着重要的参考价值。
值得注意的是:论文研究模型最初来源于其他学者用来处理地震数据。由于考虑到声发射与地震波具有一些共通性,通过修正其模型参数,延伸到RBPF处理声发射信号中,并取得了不错的效果。然而,对声发射信号最优模型的建立和过程,噪声特征仍需作进一步的研究。
(
):
[1] Niri E D,Farhidzadeh A,Salamone S.Nonlinear Kalman filtering for acoustic emission source localization in anisotropic panels[J].Ultrasonics,2014,54:486-501.
[2] Baziw E,Jones I W.Application of Kalman filtering techniques for microseismic event detection[J].Pure and Applied Geophysic,2002,159:449-471.
[3] Zhang W M,Du G,Zhong S,et al.Study of nonlinear filter methods:Particle filter[J].Journal of Systems Engineering and Electronics,2006,17(1):1-5.
[4] Petar M D,Jayesh H K,Zhang J Q,et al.Particle filtering[J].IEEE Signal Processing Magazine,2003,20(5):19-38.
[5] Zhou C J,Zhang Y F.Particle filter based noise removal method for acoustic emission signals[J].Mechanical Systems and Signal Processing,2012,28:63-77.
[6] Menéndez R M,Freitas N,Poole D.Dynamic modelling and control of industrial processes with particle filtering algorithms[J].Computer Aided Chemical Engineering,2004,18:721-726.
[7] Freitas N.Rao-blackwellised particle filtering for fault diagnosis[J].IEEE Aerospace Conference Proceedings,2002,4:1767-1772.
[8] Mustière F,Bolic'M,Bouchard M.Rao-Blackwellised particle filters:Examples of application[A].IEEE CCECE/CCGEI[C].Ottawa,Canada:[s.n.],2006:1196-1200.
[9] 潘宏侠,门吉芳.粒子滤波在轴承故障振动信号降噪中的应用[J].振动、测试与诊断,2011,31(3):354-356.(Pan Hong-xia,Men Ji-fang.Bearing fault vibration signal noise reduction based on particle filtering[J].Journal of Vibration,Measurement & Diagnosis,2011,31(3):354-356.(in Chinese))
