KZ-28型可控震源高精度隔振系统研究
2014-05-08李淑清王亮亮陶知非宋云峰
李淑清,王亮亮,陶知非,宋云峰
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 东方地球物理公司,涿州 072750;3. 天津科技大学机械工程学院,天津 300222)
可控震源是陆地油气勘探中采用反作用原理激发地震波信号的一种大型勘探设备,它能够产生振幅恒定、频率连续变化的地震信号[1].通常可控震源隔振系统为被动隔振系统,主要隔离发动机以及液压系统等产生的振动干扰对激发信号的影响,KZ–28型可控震源在激发频率 6~250,Hz范围内的被动隔振效率基本能够满足地震勘探的激发需要.但是,因为低频率信号(6,Hz以下)具有的波长属性、对一些高速地质体良好的穿透性以及与流体识别有关的特殊属性,所以采用低频信号是未来地震勘探震源激发信号发展的一个趋势[2-3].由于被动隔振系统的固有频率不能无限制降低,在低频范围内隔振效率还远不能达到要求,因此影响油气勘探的地质效果.
本文在分析现有可控震源隔振系统的基础上,研究了混合隔振系统并进行了实验,以期提高对低频干扰的隔振效率,为混合隔振系统在可控震源上的应用提供理论依据和技术保证.
1 可控震源被动隔振系统
1.1 系统结构
可控震源的激振部分称为振动器,车体通过隔振系统压在振动器之上,与其(半)柔性连接,车体本身就作为反作用原理中的静载压重质量存在.大载荷的压重可以保证振动器在振动过程中与地面的耦合,最大限度地减少在向地下传递激发能量过程中的能量损失与激振信号畸变[4].
KZ–28型可控震源被动隔振系统实物及结构见图 1.其工作过程为:通过提升液压缸将平板压在地面上,振动器产生的振动力通过平板向下传输到地面形成地震波,液压缸反向向上的力会通过框架作用于车体.隔振系统要隔离振动器产生的振动对车体的影响,同时避免可控震源车体、发动机、气路、液压等系统产生的干扰噪声对激振信号产生影响.通过隔振系统的振动隔离作用,达到使震源的振动与车体振动相隔离的目的,最大程度地把振动器产生的相干振动能量传入地下.

图1 可控震源被动隔振系统Fig.1 Passive vibration isolation system of vibroseis
1.2 隔振效率计算
相比炸药震源、电火花震源、落锤震源等引起的脉冲地震信号,可控震源产生的激励信号时间长,且为均衡振幅的连续扫描振动信号,其频率可以人为调节,频域宽、能量强、激发过程安全、对周围环境危害小、作业效率高[5].
当震源车连续激振工作时,车体以激振频率振动.激振频率与可控震源车的固有频率相同时,系统会发生共振,如果没有阻尼,振幅将无限增大.
一个单自由度弹性系统的固有频率为

式中:fn为固有频率,Hz;k为弹簧刚度,N/m;m为质量,kg.
空气弹簧的刚度为

式中:k为空气弹簧的刚度,N/m;F为弹簧受力,N;X为弹簧变形量,m;p为工作腔压力,Pa;As为有效面积,m2.
所研究的可控震源使用了 8个空气弹簧作为隔振装置,弹簧充气压力为0.5,MPa,单个空气弹簧的刚度为2.643×105,N/m,车体最大载荷压重质量为28×103,kg,该震源车系统固有频率为[6]
可控震源激振频率的范围为 6~250,Hz,因此可计算出其隔振效率η.

式中:f为激振频率,Hz;fn为系统固有频率,Hz.
由计算结果可以看出,在 KZ–28型可控震源激振频率范围内,隔振系统的理论隔振效率在 94%以上,能够较好地隔离干扰噪声,避免影响信号输出和车体的疲劳损坏.
1.3 仿真实验
可控震源隔振系统利用单自由度弹性–质量系统进行被动的隔离平板的振动干扰.根据震源的工作原理,其结构可以表示为图2的物理模型[7].
系统的理论运动方程为

式中:f(t)为车体受到的振动干扰力.模型中 Ft为不确定性的低频动载荷.
假设初始状态为 0,对式(3)拉普拉斯变换得到以干扰激励为输入、以振动位移为输出的传递函数

干扰激振力是随机的,不容易测量,但是可以转换为由干扰振动引起的平板振动位移表示.设平板的位移为 Xs,车体的位移为 X,由牛顿定律可得车体运动方程为

根据上述车体的运动方程和传递函数可画出Simulink隔振仿真框图,如图3所示[8].

图3 被动隔振系统仿真框图Fig.3 Simulation diagram of passive vibration isolation system
空气弹簧的阻尼比 ξ = 0.01,单个空气弹簧的阻尼为

8个空气弹簧的阻尼和为 13.76,kN·s/m.将震源车的质量m和空气弹簧参数代入式(4),可得系统传递函数的表达式

在固定频率和随机信号 2种情况下分别进行系统仿真,结果见图 4.其中固频激励信号为 ()xt=2sin(12π π/6)t+ ,即频率为6,Hz的激振信号.
仿真结果表明,在可控震源的正常工作频率范围内,激振平板的振动力只有很小的部分传输到了车架上,隔振系统的隔振效率大于 90%,能够保证正常施工.当振动频率提高时,传输的力将更小,所以车架和控制室受到的振动影响很小.
在实际测试中发现,当震源发生低于 6,Hz的激振信号时,可控震源系统的隔振效果将大大降低,主要的原因是在理想状态与实际状态之间存在一个不确定因素——车体对平板施加的低频扰动力 Ft,其与隔振系统有关,当激发频率 f≫fn时 Ft可以忽略不计,成为理想状态,否则 Ft不能忽略,此时若据图 2建立模型就存在误差.为保证震源在低于 6,Hz的干扰频率范围内能够有较高的隔振效率,本文研究了混合隔振方法,并进行了实验.

图4 被动隔振系统的仿真结果Fig.4 Simulation curve of passive vibration isolation system
2 混合隔振系统
2.1 混合隔振方法
为深入研究 6,Hz以下可控震源隔振方式,提高KZ–28型可控震源被动隔振系统在低频范围内隔振效率,提出混合隔振系统的方案.针对可控震源被动隔振系统安装的8个空气弹簧,混合隔振系统采用8个作动器与空气弹簧并联,安装位置和空气弹簧一致.传感器检测车体的扰动信号反馈给控制系统,由单片机采用 PID控制算法计算并发出控制指令,控制作动器输出与干扰方向相反的力,抑制干扰振动.
2.2 实验研究
可控震源车身质量达到 28,t,若采用实物进行实验需要安装承载质量大的作动器,价格昂贵,所以模拟震源车搭建了实验平台,采用反馈控制的方法实现混合隔振,以验证其对低频干扰的隔振效果.
以激振器(J–2型)模拟震源车的振锤,敲击底板产生振动干扰;以螺旋弹簧为被动隔振元件,并且安装振动主动控制的作动器(JZQ–2型),组成一个混合隔振实验平台,如图5所示.
图5 混合隔振系统实验平台Fig.5 Experimental platform of the hybrid vibration isolation system
实验系统由数据实时采集、调理转换、显示存储以及控制执行等部分组成.实验系统的主控制器为ATmega128单片机,传感器为KISLTER 8276A型压电加速度传感器,A/D 转换器选用 DEWE–MDAQ–PCI–16型,由动态信号分析模块DeweSoft实时显示和存储采集的数据.由于PID控制可靠而稳定,控制算法可移植性强、鲁棒性好,所以系统采用 PID控制算法[9].
激振器产生的不同频率干扰通过底板传递给上板,传感器采集振动信号,经信号调理和A/D转换后将信号传递给控制系统,控制系统数据处理后输出控制作动器的电流信号,通过功率放大器使作动器产生抑制振动干扰的力,从而达到减振目的.动态信号分析仪能够实时显示传感器采集的振动信号并且存储数据,便于隔振效率的计算和系统控制参数的改进.混合隔振系统的工作原理见图 6,系统工作流程见图7.
图8是干扰频率为22,Hz时的系统隔振曲线,被动隔振效率达到 90%,采用混合隔振的效率略有提高,主动隔振基本不起作用.因此重点研究低频条件下的系统隔振问题,采用混合隔振的方式,达到抑制低频干扰的目的.

图6 混合隔振系统工作原理图Fig.6 Diagram of the hybrid vibration isolation system

图7 混合隔振系统控制流程图Fig.7 Flow chart of the hybrid control system
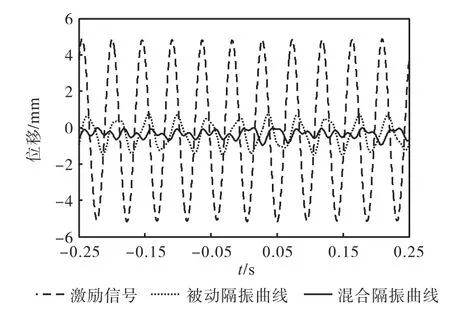
图8 干扰频率为22,Hz时的隔振曲线Fig.8 Vibration isolation graph with interference frequency of 22,Hz
针对低频微振动,实验测试了 6,Hz以下的振动频率,结果见图9.图9(a)是干扰频率为5.8,Hz时的被动隔振和混合隔振曲线.从采样值得到:被动隔振信号的峰–峰值 A1为 2.788,17,mm,混合隔振信号的峰–峰值A2为0.211,21,mm,所以主动隔振效率为
同理可得到:干扰频率为 4,Hz时被动隔振信号的峰–峰值为 0.498,38,mm,混合隔振信号的峰–峰值为 0.094,31,mm,主动隔振效率为 81.08%;干扰频率为 2,Hz时被动隔振信号的峰–峰值为 0.622,89,mm,混合隔振信号的峰–峰值为 0.106,44,mm,主动隔振效率为82.91%.
实验表明:在系统干扰频率较高时的被动隔振效率较高,已经能够满足系统工作要求,此时增加主动隔振系统后的作用不是很大;在低频范围内(6,Hz以下)混合隔振系统比被动隔振系统的隔振效率明显提高,干扰频率在2,Hz以上时的隔振效率大于80%,优于国内现有可控震源隔振系统的相关研究成果.因此,本实验采用混合隔振抑制低频干扰的方案合理,数据指标达到要求.

图9 低频干扰时的隔振曲线Fig.9 Vibration isolation graph with low frequency interference
3 结 语
KZ–28型可控震源是目前国内最先进的勘探设备,对6,Hz以上干扰的被动隔振效率达到90%,但是其不能准确地激发 6,Hz以下的信号.为了提高其在干扰频率 6,Hz以下时的隔振效果,本文建立了可控震源隔振系统的物理和数学模型并进行了仿真研究;针对低频振动的干扰,采用了混合隔振方法,并搭建了实验平台.实验表明:混合隔振系统在 2~6,Hz低频段的主动隔振效率达到 80%以上,隔振效果明显.在石油勘探的信号激发过程中,采用混合隔振技术不仅可以减少设备因机械振动造成的损害,提高设备的使用寿命,更重要的是可以提高激发信号的准确性,保证石油勘探后期分析的效果.此研究成果有望在新型可控震源抑制低频干扰中得到应用.
[1] 陈祖斌,林君,于生宝,等. 轻便浅层地震可控震源的研制[J]. 仪器仪表学报,2003,24(3):311–314.
[2] 陶知非,苏振华,赵永林,等. 可控震源低频信号激发技术的最新进展[J]. 物探装备,2010,20(1):1–5.
[3] 陶知非,赵永林,马磊.低频地震勘探与低频可控震源[J]. 物探装备,2011,21(2):71–76.
[4] 弢姜 ,林君,陈祖斌,等. 相控震源对水平层状地下介质的高信噪比检测[J]. 仪器仪表学报,2006,27(11):1369–1372.
[5] Claudio B. Low-frequency vibroseis date with maximum displacement sweeps[J]. The Leading Edge,2008,14(5):123–126.
[6] 夏鹏翎,李广军. 空气弹簧在可控振源中的应用[J].物探装备,1998,8(3):25–27.
[7] 程耀东,李培玉. 机械振动学[M]. 2 版. 杭州:浙江大学出版社,2005.
[8] 王文娟. 机械振动分析的 Matlab/Simulink仿真研究[J]. 现代电子技术,2006,24:46–48.
[9] 何建忠. 精密隔振平台主动阻尼系统的低频微振动测量研究[J]. 仪器仪表学报,2006,27(6):543–547.
