低成本无人机遥感图像获取及后续处理技术
2014-05-05胡朝晖
胡朝晖
(重庆电子工程职业学院图文信息中心,重庆401331)
0 引言
小型无人机特别是微型无人机 (翼展宽度<1.5m)具有不受场地限制、不必申请空域(国家对1 000米以下的空域不实行管制)和平台构建、维护以及作业成本极低的优点,装配数码相机以后可以作为简单的可见光遥感系统使用。
无人机遥感具有如下的好处:(1)只要天气条件允许均可随时飞行;(2)实时获取影像资料;(3)可以实现低成本影像获取;(4)可以作为卫星遥感和有人机遥感的有益补充,在小区域、低空领域具有一定的优势。但是由于载荷的限制,相机无法安装三轴的自稳定云台,因此遥感图像受姿态影响很严重。飞行器在飞行的过程中,姿态(偏航、俯仰、滚转)、高度、速度等因素不断变化,势必会对地面目标的成像产生影响,发生畸变。
所获得的地面遥感图像主要有两种应用:一是确定地面的感兴趣目标点的位置,这对于未知区域的可疑目标发现或作为炮兵的近距离火力校射都有用处;二是对地面做有重叠的连续拍摄,通过地面软件处理生成大面积数字地图。
1 微型无人机遥感硬件平台构成
1.1 无人机及遥控系统
无人机以EPO泡沫为材质,其优点是机身抗摔性强,能有效保护机身内设备安全。动力驱动方式采用中段腰推式驱动,较前拉式驱动减少飞机坠落时螺旋桨及电机对地面人或物的损害程度。
遥控系统为国产天地飞8通道2.4G控制器和接收机,除了飞机常用的副翼、升降、方向、油门4个通道外,其他通道还用于飞机自驾时的几种模式切换,包括手动遥控、姿态增稳、定点盘旋、自动返航等。
1.2 遥感系统
遥感系统为无人机系统中的关键系统,其主要功能是利用地面上空的飞机、飞船、卫星等飞行物上的遥感器收集地面数据资料,并从中获取信息,经记录、传送、分析和判读来识别地物。低空遥感系统具有以下优势:(1)受天气影响较小,作业方式灵活;(2)平台建设与后期维护成本极低;(3)飞行高度较低,可以获得大比例尺高精度影响,在较小区域内获取信息具有巨大优势;(4)对千米以下空域国家不实施管制,不必申请空域;(5)获取的影像重叠率高,提高了后期处理影像的可靠性。
本文实验中采用的系统是桂林飞宇FY-31AP,它是一款惯性姿态平衡仪系统和简易自动驾驶仪,可用于固定翼飞机或者简易三轴云台。FY31AP硬件设备与其数传电台连接后,在GCS地面站软件实现如下功能:
(1)自动平衡:FY-31AP可以在任何天气情况下自动保持飞机的水平飞行姿态。
(2)航线飞行:连接GPS模块后就可以实现按照设定的航点自动飞行,目前可以设定8个航点。
(3)自动返航:连接GPS模块后可以切入自动返航模式,飞行器会保持当前的高度自动飞回返航点,到达目标点后盘旋飞行。
(4)自动盘旋:连接GPS模块后可以切入定点盘旋模式,飞行器会保持当前的高度,以切入点为圆心盘旋飞行,盘旋半径可以设定,默认半径是80米。
(5)GCS地面站软件:连接数传电台设备后,可以通过电脑端的地面站软件设定飞行路径、飞行参数,监控和记录飞行轨迹等。
(6)所有飞行记录参数均以txt格式保存在电脑上,便于后期处理影像和回放飞行过程。
1.3 飞行作业方式
1.3.1 制作航线地图并规划航线
首先,利用Google earth地图剪切制作需要拍摄区域的地图并转换为符合遥测系统使用的地图文件。根据地图规划一个准确的航线设计,便于后期对拍摄所得的正投影照片进行分析和处理。一般来讲,最佳航线规划为“S”型,能确保所航拍的路径无遗漏。
1.3.2 地面测试整套系统
航拍任务需要飞行系统、遥测系统、拍摄系统均正常工作才能完成,因此在起飞前确保无人机上天以后所有工作设备的可靠性,在起飞前一定要做好每一项功能的检测。依次做好飞行系统的副翼、升降、方向舵、油门控制、自动平衡、自动返航、自动盘旋等飞行功能的检查;遥测系统的控制范围、周边是否有过强干扰信号源、系统供电充足等。
1.3.3 获取航拍照片
飞机通过滑跑起飞,将摄像机固定于飞机腹部正下方,设置为间隔5秒自动拍照一次。起飞后,手动将高度拉升至200米高度,通过自驾系统将飞机设置为定点盘旋模式,通过电脑设置其航拍所需要飞行高度和盘旋半径。遥测系统将参数确认之后,将自动控制飞行进入预定高度和盘旋半径。然后再通过预设航线功能,飞机将自动沿预设航线进行飞行。此时,位于飞机腹部的相机每间隔5秒将整个飞行过程中的航拍图记录下来。我们以某大学新校区为飞行航拍区,飞行记录以及地面站控制效果如图1。

图1 飞行记录以及地面站控制效果图
2 遥感图像处理
2.1 数据构成
2.1.1 飞行记录数据
FY31-AP的飞行记录文件以txt文档保存,记录文件格式内容如下:
……
#DATA1,1,10,1,2,1,,0,0,0,2936.9981,
10618.1054 ,85.91,52.2,589,60.48,302.9,223,3.1*
#DATA3,-2,13,1315,1731,1467,1450,0*
#DATA2,00,60,293,36,2937.0360,10618.0860,2936.9673,10617.9712,0,0,054658,110911,28,0,0,0,0*
……
从#DATA1第九个数据开始,其意义依次为:纬度、经度、航向、时速、海拔高度、?、气压高度、目标距离、侧偏距。
2.1.2 影像数据
提取照片影像数据生成时间和GPS时间,将所有照片影像在其航线上的GPS位置及飞行姿态信息用自己开发的软件通过半自动化方式将其关联,如图2。

图2 航拍照片显示结果
2.2 几何校正
虽然微小型无人机体积小,但其稳定性和抗风能力较差。即使装有自动驾仪与增稳陀螺设备,但在拍照过程中还是会出现飞行姿态倾斜或者受风影响而抖动,而相机本身也存在镜头的几何畸变。这就要求首先对遥感图像进行几何校正。传感遥感图像的几何校正利用最小二乘法,使用多项式作为变换函数进行几何校正。对于地面相对平坦的情况,校正精度好。直接对像变形本身进行数学模拟,认为遥感图像的几何畸变可以看作是平移、缩放、旋转、仿射、弯曲等基本变形的合成。因而校正前后图像相应点之间的坐标变换可以用一个适当的多项式来表达[1]。图3为航拍照片和几何校正后的照片对比。
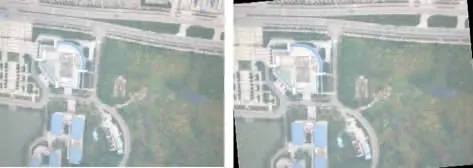
图3 航拍照片几何校正后的对比图
最后,我们将4幅独立的某大学校门的航拍图校正后,通过PhotoShop CS3的PhotoMerge拼接在一起,组成完整的效果图,如图4(边缘部分已剪去)。

图4 航拍照片校正效果图
3 结语
低成本无人机系统,以低成本、低空域、灵活机动的方式获取清晰度较高的航拍照片。在地质勘测、违法用地查处、市政设施观察等领域有一定的使用价值,但后期大面积自动航拍图像处理的开源软件还不多,人工处理工作量较大。
后期还应采用更稳定的飞机模型作为载机以及具备自驾和控制相机快门的飞控系统,以提高航拍照片的正投影效果和重叠率,使后期的照片处理工作效率更高。
[1]赵鹏.微小型无人机遥感图像应用[J].火力与指挥控制,2009(34).
[2]王勇.机动飞行环境无人机航拍图像拼接技术研究[J].现代电子技术,2012(35).
[3]庞治年.无人机航拍图像纠偏处理研究[J].电子产品可靠性与环境试验,2009(27).
[4]洪字.无人机遥感影像获取及后续处理探讨[J].遥感技术与应用,2008(23).
[5]金伟.无人机遥感发展与应用概况[J].遥感信息,2009(1).
