打印机显示模块的机器视觉检测系统的设计
2014-05-04战荫伟
战荫伟,付 波
(广东工业大学 计算机学院,广东 广州510006)
0 引 言
在打印机显示模块生产过程中,一些因素如电路板引脚错误焊接等会导致显示预设功能界面错误,例如应该通过点阵显示Ready字样却没有显示或者显示不全完而发生错误,影响打印机正常使用,因此,打印机显示模块的检测十分重要。检测方法一般有两种。一是电气的方法,检查打印机处于各功能状态时电路板的通电情况,不过这种方法极其复杂,不直观,所以目前一般不采用;二是视觉方法,检测显示屏各功能界面图像的显示情况,这是目前通行的检测方法。当前,多以人工手段检测打印机显示模块,即通过人眼来分辨各功能界面图像是否错误。人眼易疲劳、具有主观性且对大量密集信息分辨力不足,因此人工检测容易造成误判或漏判、检测速度慢、精度低等问题。
由于显示屏显示图像的结构稳定,特征明显,因此很适合使用自动化的手段代替人工进行检测。事实上,已有很多将机器视觉应用于LED显示屏检测的应用[1-6]。文献[1]中提出了基于机器视觉检测的LED显示屏的两个核心问题:对每个LED灯区域的定位和灰度采集。提出学习“图片”法来定位LED灯区域,建立学习图片中LED灯的中心点位置和待检测图片中LED灯中心点位置的仿射变换,从而完成LED灯的定位。文献 [5]提出了手机显示屏坏点的检测,将机器视觉应用于手机显示屏的检测。文献 [6]提出利用数学形态学消除噪声点,提取LED显示单元对应的点阵ROI。本文基于专业机器视觉库Halcon[7-9],设计一个打印机显示模块的视觉检测系统。
1 系统总体方案设计
系统工作流程见图1,系统结构见图2,系统主要由处理系统、相机、气缸 (运动控制)、工作台等四部分构成。相机由工业数字相机、光源和光学镜头构成,主要负责采集图像,工业数字相机通过1394a接口与上位机相连,将采集到的图像数据经过图像采集卡传输给处理系统;气缸由5个气缸按钮手、滑道和气管构成,主要负责执行机械运动,实现自动化;处理系统由计算机、视觉软件和图像采集卡构成,负责图像数据的处理和传输;工作台由控制核、指示灯和蜂鸣器构成,主要负责运动控制。

图1 系统工作流程

图2 系统结构
2 光学硬件选型
光学硬件选型主要包括相机、镜头和光源的选型。相机的选择决定了系统的检测精度,本系统使用大恒300万像素彩色相机DH-HV3110FC,分辨率达到0.05mm,使得点阵中每个点元素包含的像素达到100个,足以用来判断一个点是否被点亮,满足要求。镜头的选择是根据工作视野和工作距离来确定的,检测微小元器件时,可能会选用放大镜、远心镜等,本系统选用的是焦距为25mm的普通镜头Computar M2514-MP2。
光源选择的合适已否直接影响着视觉系统的应用效果。依据LED灯的工作原理[10],本系统选用LED带漫射板球积分光源。显示模块的显示屏是带LED背光的液晶显示屏,显示屏上方还有一个透明的玻璃外壳,显示图像是16×16×5的点阵,这样的显示结构决定了不能用直线光源(如条形光源等),必须采用方向和亮度都均匀的光源,否则显示屏会产生强反光或显示屏各部分亮度不均匀,影响检测效果。LED带漫射板的球积分光源,又称漫射无影光。它采用半球状漫反射面,将底部环形光发出的光线均匀反射到光源发出口,面分布均匀性、方向均匀性都很好,可以将表面比较复杂的物体或图片照射出比较均匀的效果。相机和镜头的参数见表1和表2。

表1 DH-HV3110FC数字相机主要参数

表2 Computar M2514-MP2镜头的主要参数
3 视觉软件设计
系统实验对象是某公司生产的L1080显示模块,显示模块的点阵ROI包含16个连续的大小相同的矩阵Li(i=1…16),每个矩阵Li的大小为16×5,基本元素为0.5mm×0.5mm矩形区域Li;j,k(i,j=1…16,k=1…5)。本系统的检测工作是识别Li;j,k(i,j=1…16,k=1…5)点亮与否,与标准功能界面图像比较,然后判别出该功能界面显示与否。L1080显示模块预设6个功能界面图像,如图3所示。图3中,自上而下,第一个为所有Li;j,k都点亮、第五个为所有Li;j,k都没有点亮、其他仅为部分点亮等情形。
3.1 软件设计中的关键技术
根据LED显示屏显示图像的结构是16×16×5点阵可知,该系统的关键技术就是显示图像的16×16×5点阵ROI的精确定位以及灰度检测。采用信息量最大的图3(a)图像数据进行建模,建模算法主要分3步:第一步,显示屏定位;第二步,点阵ROI的定位;第三步,将点阵转化成数值矩阵。
3.1.1 显示屏的定位
在视觉系统中,由于机械和工件都存在一定的误差,并不能保证被测物在图像中总处于同样的位置和方向,因此系统设计检测算法必须能够应对这种位置的变化。
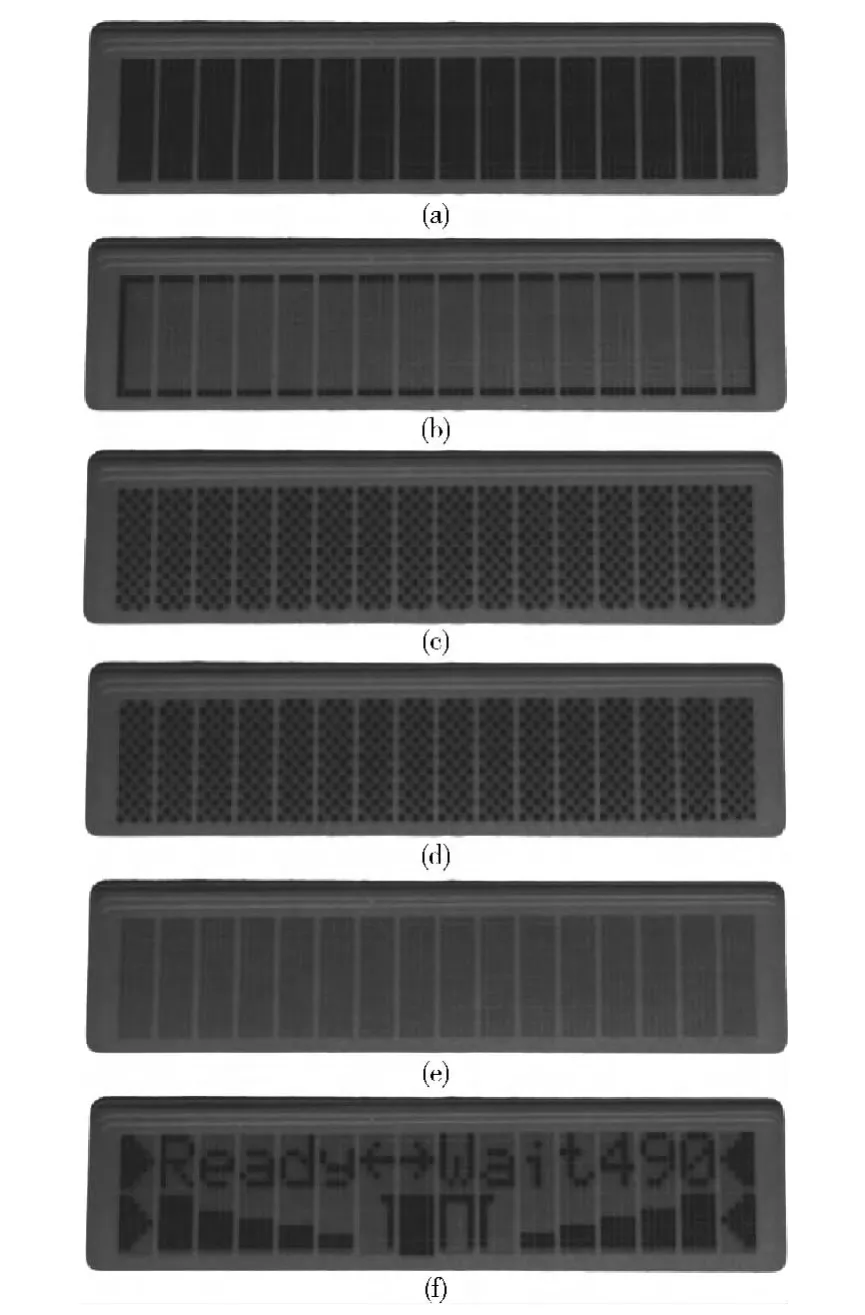
图3 L1080预设功能界面图像
首先,对图像进行校正,使用大津法[11](OTSU)
分割出图像的显示屏部分。其算法的基本原理是:使得类间方差最大化的阈值t便是分割出图像前景目标的最好阈值

式中:α2——类间方差,q1——灰度值不大于t的类的概率,q2——灰度值大于t的类的概率,μ1——灰度值不大于t的类的均值,μ2——灰度值大于t的类的均值,μ——两类的类间均值。
使得α2最大的灰度值t就是最佳阈值。利用阈值t,分割出显示屏区域。然后校正图像。显示屏的上下边界是两条平行线,所以显示屏区域的最小外接矩形与x轴正向的夹角θ∈(-π/2,π/2]是显示屏的偏转角。利用偏转角θ和平移值(dx,dy)生成的仿射变换矩阵校正被测物的图像,仿射变换矩阵为

最后,利用校正后图像的二值图像创建形状模板[12],因为二值图像创建形状模板更稳定。
3.1.2 点阵的定位
利用大津法 (OTSU)、数学形态学方法[13-15]处理校正后的图像得到点阵ROI的粗定位,16个类矩形区域Li(i=1…16),如图4所示。

图4 16个类矩形区域
然后,对Li(i=1…16)精确的定位包含在其内的点阵。Li包 含 一 个16 (5的 点 阵, 基 本 元 素 是Li;j,k, 每 个Li;j,k的高度和宽度都是基本相同的,但由于其自身工艺的原因,使得各Li;j,k的高度和宽度有一定的差别,导致定位过程中可能会产生累计误差,使得误差越来越大,最终定位错误。对点阵ROI定位有两种方案。
方案1:如图5所示,根据Li的最小外接矩形和点阵的垂直方向Li;j,k的数量 (作为点阵ROI的先验知识)定位出包含一行点元素的矩形区域,如图5(b)所示,再根据该矩形区域和点阵的水平方向Li;j,k的数量 (作为点阵ROI的先验知识)定位出每个Li;j,k的位置,如图5 (c)所示,最后得到完整的点阵ROI,如图5(d)所示。

图5 方案1点阵定位过程
方案2:根据方案1,得到完整的点阵ROI,然后继续对点阵中每个Li;j,k的位置进行精确定位,如图6(d)所示。进行精确定位 的 原 因 是 Li;j,k很 小,而 且 各 Li;j,k的 大小不尽相同,所以计算出的 Li;j,k很有可能与实际Li;j,k不完全重合,一大部分覆盖实际的Li;j,k,一小部分覆盖实际的Li;j,k+1,慢慢的由于误差累积的原因很可能就会造成错误定位。精确定位的原理是Li;j,k是有边界的,只要连续对Li;j,k对应的图像进行阈值分割,当分割出的区域面积增长值小于一个给定值时,计算出的Li;j,k完全覆盖实际的Li;j,k,消除累积误差;否则继续处理。阈值取为

式中:N——感兴趣区域包含的总像素数,f——像素点与该点灰度值的映射,所以f(i)——像素i的灰度值。
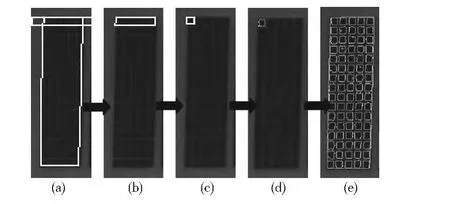
图6 方案2点阵定位过程
根据以上两种方案,均可以得到一个16×5的点阵,对每个Li(i=1…16)做同样处理,便可得到一个16×16×5的点阵。
3.1.3 点阵转化成数值矩阵
在检测每个预设图像时,通过查找模板、做仿射变换,将得到的16×16×5的点阵映射为当前图像的点阵ROI,对每个Li;j,k对应的图像做阈值分割处理,如果得到区域的面积在一定的范围内,则说明Li;j,k对应的数值为1,否则为0,这样便得到16×16×5的数值矩阵,再进行数值矩阵对比即可完成检测。
3.2 实验结果
本文共采用100个L1080显示模块做测试,50个采用方案1,50个采用方案2。实验数据统计见表3。由实验结果知,方案2的效果更好,虽然在时间上有所增加,但相对检测性能来说,时间上的部分增加是可以接受的,所以本系统的实现采用了方案2。

表3 实验结果统计
分析导致方案1的误判、漏判的实验结果图7(a)的发现:由于没有消除累积误差,造成定位的不准确,使得实验结果也发生很大的偏差;分析图7(b)的测试结果发现:矩形框选中Li;j,k和Li;j,k+1,Li;j,k是没有被点亮的,但由于定位的不准确,使得计算出Li;j,k有很大一部分覆盖在实际的Li;j,k+1上,导致误判为点亮。方案2实验结果如图7(c)所示,对不同的L1080,测试结果显示,点阵ROI完全覆盖在正确的位置上,结果完全正确。
4 结束语

图7 检测效果
对打印机显示模块生产行业进行深入的调查研究,发现目前多数以人工手段完成其性能的评估和检测,其检测速度和精度已无法满足现有的工业自动化生产需求,因此,设计实现基于专业机器视觉库HALCON的打印机显示模块自动化检测系统代替人工检测应运而生,提出的定位点阵ROI的方法能够消除累计误差,实现对显示模块点阵ROI的精确定位,提高检测结果的精度。改善了传统的人工检测方法的速度慢、精度低等问题,能够很好的满足现代化工业生产的需求。设计方案也存在不足,系统的工作环境 (包括机械环境和光源环境)必须固定而且比较敏感。
[1]WANG Hongye.LED display module inspection system [D].Dalian:Dalian University of Technology,2012 (in Chinese).[王宏业.LED显示单元检测系统 [D].大连:大连理工大学,2012.]
[2]ZHANG Yu.Inspection technique of TFT-LCD screen mura drawback based on machine vision[D].Harbin:Harbin Industrial University,2006 (in Chinese).[张昱.基于机器视觉的TFT-LCD屏mura缺陷监测技术研究 [D].哈尔滨:哈尔滨工业大学,2006.]
[3]ZHANG Ge.Research on LCD defects automatic detection system[D].Nanjing:Nanjing University of Science and Technology,2008(in Chinese).[张戈.液晶显示屏缺陷自动检测系统的研究[D].南京:南京理工大学,2008.]
[4]PANG Ran.Research on LCD digital table visual identification key technology [D].Guangzhou:Guangdong University of Technology,2008 (in Chinese).[庞然.液晶数字表视觉识别关键技术研究 [D].广州:广东工业大学,2008.]
[5]QIN Xiaowei.Research on mobile phone screen bad point detection system based on machine vision [D].Chengdu:University of Electronic Science and Technology,2009 (in Chinese).[覃晓伟.基于机器视觉的手机屏坏点检测系统研究 [D].成都:电子科技大学,2009.]
[6]XU Yunfeng,ZHANG Yan.Research on LED screen brightness detection algorithm [C]//Proceedings of International Conference on Audio,Language and Image Processing,2012:925-929.
[7]ZHANG Yujin.Machine vision and image techniques [J].Automation Panorma,2009 (2):20-25 (in Chinese).[章毓晋.机器视觉和图像技术 [J].自动化博览,2009(2):20-25.]
[8]Carsten Steger,Markus Ulrich,Christian Wiedemann.Machine vision algorithm and application [M].YANG Shaorong,WU Dijing,DUAN Deshan,transl.Beijing:Tsinghua University Press,2009 (in Chinese).[Carsten Steger,Markus Ulrich,Christian Wiedemann.机器视觉算法与应用 [M].杨少荣,吴迪靖,段德山,译.北京:清华大学出版社,2009.]
[9]LI Jingfeng,YANG Lina,PAN Heng.Visual C++ detailed serial communication technology [M].Beijing:Mechanical Industry Press,2010 (in Chinese).[李景 峰,杨 丽 娜,潘 恒.Visual C++串口通信技术详解 [M].北京:机械工业出版社,2010.]
[10]GENG Chunming,CAI Dongbao.Design of mechanical parts inspection system based on computer vision [J].Computer Measure &Control,2012,20 (1):38-39 (in Chinese).[耿春明,蔡东宝.基于计算机视觉的机械零件检系统设计 [J].计算机测量与控制,2012,20 (1):38-39.]
[11]Tian H,Srikanthan T,Asari K V.The segmentation algorithm of improvement a two-dimensional otsu and application research [C]//2nd International Conference on Software Technology and Engineering,2010:V1-76 -V1-79.
[12]ZHAO Zhenming,PENG Guohua,FU Limei.High precision and fast reliable image matching base on the shape model [J].Computer Application,2010,30 (2):25-30 (in Chinese).[赵振明,彭国华,符立梅.基于形状模板的快速高精度可靠图像匹配 [J].计算机应用,2010,30 (2):25-30.]
[13]Hu Jinmei,Li Zuoyong.Medical image segmentation algorithm based on the improved mathematical morphology [J].Computer Simulations,2011,28 (5):299-302.
[14]Chen Tingting,Cheng Xiaoping.Image segmentation using fuzzy morphology and morphological watershed algorithm [J].Journal of Southwest University,2008,30 (3):142-145.
[15]Wei Qiangqiang.Showdown mathematical morphology and its application in the image edge detection [J].Science and Technology Information,2010,10 (2):38-42.
