基于PLC的椭圆形鱼罐头机器人自动装箱生产线
2014-05-03周灿宇
周灿宇
ZHOU Can-yu
(广州鹰金钱企业集团公司,广东 广州 510900)
(Guangzhou Eagle Coin Enterprise Group Corp,Guangzhou,Guangdong 510900,China)
随着社会的高速发展,产品的生产也越来越高速和自动化。目前中国很多产品在生产过程中,产品的装箱仍然采用人工包装,工人的劳动强度越来越大,制约了企业生产能力的提高,严重影响企业的发展[1]。椭圆罐鱼罐头产品由于包装外形的特殊性,一直无法采用自动装箱技术。为了实现椭圆罐鱼罐头全自动装箱,采用基于PLC控制的机械手进行取罐、取隔层纸、放罐和放隔层纸等,以此为重点开发一条椭圆形鱼罐头自动装箱生产线。
1 鱼罐头装箱生产线的组成
鱼罐头自动装箱生产线由开箱机、机器人装箱系统、分罐伺服输送系统、箱输送系统、封箱机以及罐头输送系统等设备组成。通过罐头输送和箱输送系统,将开箱机、机器人装箱机和自动封箱机进行有效连接。利用PLC控制系统和伺服控制系统实现鱼罐头装箱生产线的全自动化。图1是鱼罐头自动装箱线总体布局图。

图1 罐头自动装箱生产线布局图Figure 1 Fish can automatic packing production line layout
2 鱼罐头自动装箱生产线的工作原理
鱼罐头自动装箱系统的关键是鱼罐头的排列输送,确保罐头的有序排列,核心是采用PLC控制的机械手,实现自动装罐、自动放罐和自动抓放隔层纸。
经过贴标后的椭圆鱼罐头,通过单排输送链,进入伺服分列机,由伺服分列系统将鱼罐头有序排列成3列,进入三列输送链和缓冲区,并直接进入装罐提升机,等待机器人抓手动作。纸箱在采用自动开箱机进行开箱后,通过纸箱输送链将空纸箱输送到装箱输送链,设定规格是每次装箱为4箱,每箱为24罐(每层6罐,共4层)。在机械手装罐动作开始前,空纸箱进入装箱导向框,当进入纸箱数量达到4个时,空纸箱就位完毕。隔层纸通过人工加满隔层纸后,通过手工推送进入隔层纸提升机的工作位置。
在纸箱、隔层纸和罐头分别到位后,本装箱机器人机械手采用真空吸取系统,当机械人的PLC控制系统收到相应信号后,从原点开始工作,完成取(放)隔层纸、取(放罐头)等动作。分别完成4次放罐和5次放隔层纸后,完成一个周期的机器人装箱动作。装满罐头后的纸箱,通过装箱输送链输送到自动装箱机,完成装箱工序。
3 装箱生产线的构成
针对椭圆鱼罐头外形的特殊性,需要对机器人装箱系统和相关系统等进行专门设计,充分利用成熟的开箱和封箱设备以及相关的输送连接,保障装箱生产线的自动化运行。
3.1 机器人装箱系统
3.1.1 原理 鱼罐头机器人装箱系统采用PLC控制系统,利用伺服电机实现动作。该系统采用气压驱动,在一个机械臂上安装2个机械手,通过机械手的上下方向的直线运动和左右方向的直线运动实现1次装罐头和隔层纸的动作,罐头装箱运动方向见图2。机械手抓取动作由真空系统实现,该系统需实现自动加罐头和隔层纸两类物料,采用2个真空吸料系统,分别吸(放)罐和吸(放)隔层纸。罐头通过输送带的输送进入装罐提升机,纸箱通过自动开箱机的折叠成型,由纸箱输送带将纸箱按需进入装箱位置[2]。

图2 装罐工作方向示意图Figure 2 Canned packing work direction
3.1.2 动作分析 机器人自动装箱的布局见图3。装罐系统开始动作时,罐头输送带排列链上的罐头通过机械抓手上的真空吸头,将罐头真空吸取,并将其装进纸箱内;在放罐的同时,利用另外一个吸头完成隔层纸的吸取;当完成放罐动作后,机械手上升向右移动,并且下行吸罐,同时吸纸系统完成放隔纸动作,当完成设定的4层罐头数和5层隔层纸后,机械手回复原位,一次装箱周期动作完成。
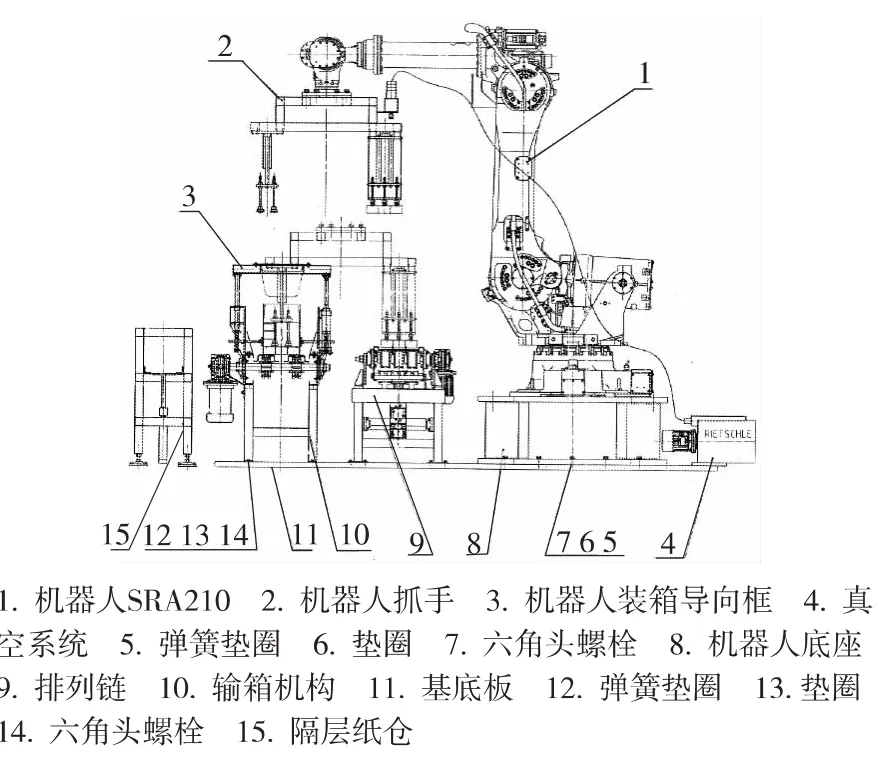
图3 机器人装箱系统示意图Figure 3 Pack robot system schematic diagram
机器人手抓的具体动作经4个循环,每个单循环动作:原位→取隔层纸→移动→取罐头(放隔层纸)→移动→放罐头(取隔层纸)→移动(来回共4个循环动作)→复位。纸箱输送系统将整箱输送到自动封箱机完成封箱操作,空纸箱同步输送进入装箱位置,实现装罐、加隔层纸、封箱全过程的自动化。机械人装箱的全部动作过程由PLC编制的程序实现,由气缸驱动,气缸由电磁阀控制,整个机械手在工作中实现上升/下降、左行/右行、吸紧/放松功能[3]。
3.1.3 机器人装箱的工作流程及PLC程序编制 根据对机器人自动装箱动作的分析,可以对机械手每个动作响应条件的判断,分别对进箱动作、隔层纸到位和装罐层数等工作参数进行判断,形成机器人自动装箱的工作流程,具体工作流程见图4。

图4 装罐工作流程图Figure 4 Can work flow chart
根据上述工作流程,将采用西门子S7-200系列的PLC进行编程控制。对控制系统的I/O分配进行确定。I/O分配表是编写PLC程序和进行现场接线的重要依据[4]。根据鱼罐头装箱的控制需要,分别对控制信号、输入信号和输出信号进行I/O分配,分配情况略。并根据各个动作分别建立通用辅助继电器地址分配。根据上述的工作流程要求及I/O分配情况和地址分配情况进行PLC程序编程,并分别对原点位置、手动程序、连续程序、单周期和单步动作等动作进行设计[5,6]。
对上述设计系统进行模拟程序校验,及时进行修正。程序运行无误后,下载到PLC中,进行调试。观察机械手的上下、左右、抓取和放松等动作开关及指示灯的亮灭情况[7]。通过一系列的调试、运行、修改,达到了预期的目的。
3.2 鱼罐头分列伺服输送系统
椭圆形鱼罐头由于包装外形的特殊性,不同于圆形罐头,直接可以进入装箱系统。在进入装箱系统前,必须进行方向性的排列,保证鱼罐头在排列方向的规则化。这样才能确保装箱动作的正常进行。椭圆鱼罐头伺服分列输送系统的组成见图5。分别由入罐单列输送带、出罐输送带、伺服电机、摆罐系统、分列输送和机架等组成。
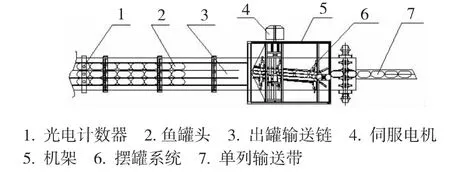
图5 分列伺服输送系统示意图Figure 5 Servo conveying system schematic diagram
分列伺服系统工作时,伺服电机脉冲细分驱动器控制伺服电机的运行,从而推动摆罐装置移动到达指定的位置,实现准确定位。当罐头从单列输送带进入,为了达到分列精准,系统通过PLC、伺服驱动器、伺服电机、接近限位开关、光电计数器组成,将罐头1列分为3列。分列时,由原始位开始每列顺延单次进罐8个,3列罐头同时达到满列限位时,伺服分罐自动停止。系统从那列先行退出满列限位,则伺服分罐再由该列开始进行放罐,伺服系统根据设定程序,为机器人装箱提供平衡稳定的3列罐头,保证自动装箱。
3.3 罐头排链输送系统
鱼罐头经过伺服分列系统后,变成3列罐头,罐头通过输送排列链进入机器人装箱系统的取罐升降机,取罐升降机的平面示意图见图6。
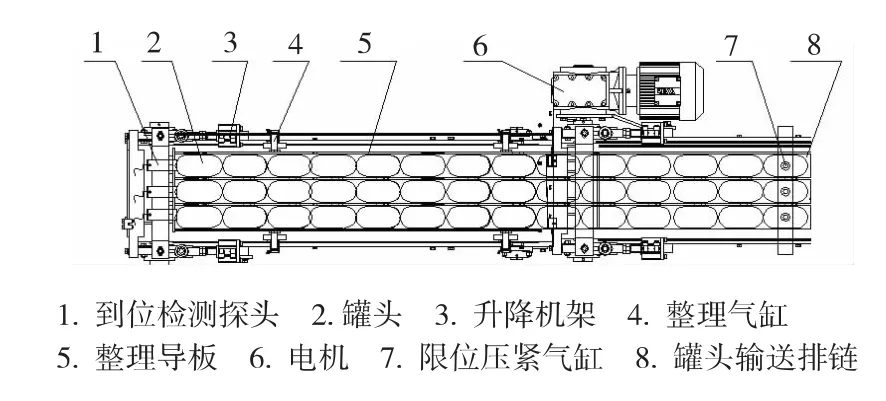
图6 罐头排链输送系统示意图Figure 6 Cans of chain conveyor system schematic diagram
为保证机器人手抓罐头过程中,取得足够数量的罐头,不至于漏罐,在输送排列链上的缓冲区的罐头必须满足进入取罐升降机的罐头数量。本设备设定每次装箱数量是4箱,每列罐头进入升降机的数量是8罐,每次进入的罐头共24罐。设定缓冲区的罐头数量是每列不少于2倍的进罐数量。
在缓冲区最低缓冲数量的位置装了具有计数和接触功能的光电开关,当每次进入取罐升降机的每列数量达到8罐时,每列罐头都到达升降机输送链末端,并通过接近开关响应,3列都满足时,限位压紧气缸动作,压紧罐头,升降机内输送链上的罐头升高到设定的高度,机器人机械手响应,进行取罐动作。
当缓冲区储存的罐头数量没有达到设定的数量时,光电探头传送给PLC的信号没有响应。需要3个光电探头和3个罐头到位检测同时满足响应后,机器手才动作。
3.4 隔层纸供给系统
隔层纸供给系统主要是由隔纸升降支架、隔层纸仓、升降气缸、支架和光电探头等组成。该供给系统的示意图见图7。专门抓取隔层纸的机械手在吸取隔层纸时,机械手底部的真空吸盘在贴近隔层纸的瞬间,形成真空状态,隔纸吸附在真空吸盘上,通过机械手臂的位移,将隔层纸准确送到纸箱内。机械手每次吸附4张隔层纸。对隔层纸的高度和有无通过光电检测头进行检测,确保每个位置有足够的隔层纸。
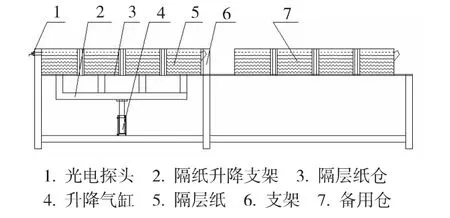
图7 隔层纸供给系统示意图Figure 7 Interlayer paper supply system diagram
4 结论
鱼罐头自动装箱系统生产线的机械手采用气压驱动,节能、无污染、高效、低成本、安全可靠。利用PLC进行动作控制,取罐、放罐、取放隔层纸均采用模块化设计思想,结构清晰,易于修改。本装置在目前中国圆罐自动装箱生产线较为成熟的基础上,对椭圆形鱼罐头自动装箱生产线的伺服分列部分和自动装箱进行了设计和优化,实现了异型罐头的自动装箱技术的突破。
机器人装箱系统在椭圆鱼罐头自动装箱生产线的投入使用后,运行状况良好,按每次同时装罐4个箱,每箱24罐的数量计算,装箱速度达到20箱/min,完全满足生产需求。该控制系统安全可靠,配置合理,达到了运行安全、可靠、操作简单,节省人工成本,降低劳动强度,达到提高的目的。
1 韩占华,郭飞.自动化在包装机械中的应用和展望[J].包装与食品机械,2011,29(3):49~52.
2 李美川,苟向民,张有良.全自动装箱线箱输链道的设计及电气控制[J].包装与食品机械,2010,28(4):37~39.
3 朱春波.PLC控制上下料机械手[J].液压气动与密封,1999(6):21~24.
4 邵忠良.基于PLC的FFS包装机移动平台设计及控制系统实现[J].食品与机械,2013,29(3):157~160.
5 黄净.电器及PLC控制技术[M].北京:机械工业出版社,2002.
6 王玉中.电气控制及PLC应用技术[M].河南:河南科学技术出版社,2006.
7 张万忠.可编程控制器入门与应用实例[M].北京:中国电力出版社,2005.