基于ARM的灭火机器设计
2014-04-29黄睿汪斌
黄睿 汪斌

摘 要: 以室内环境为研究对象,设计了一个自主行走的灭火机器人。系统以ARM单片机为核心控制单元,结合避障传感器、红外传感器和灰度传感器等实现了机器人自主行走并灭火。根据环境参数要求,对机器人的设计方案进行了合理的选择和分析,实现了机器人稳定、快速、精确消灭火源。通过实例验证,设计方案稳定可靠,机器人可在10秒内完成寻找火源并灭火。
关键词: PWM电路; 测障传感器; 火焰传感器; 直流电机
中图分类号:TP312 文献标志码:A 文章编号:1006-8228(2014)01-11-03
0 引言
目前很多高等院校和研究院所从事各类机器人的研究工作,已经在机器人的感觉识别、操作、移动技术、人机接口技术、智能化技术等方面取得了可喜的成就。这些成就为灭火机器人的研制创造了良好的环境条件。本文针对灭火机器人的硬件条件和灭火比赛的具体功能要求,进行了智能灭火机器人精确控制研究,实现机器人快速稳定地灭火。
1 研究任务
本研究是针对家庭环境下的灭火机器人,让机器人在室内环境内自主完成火源的查找并消灭火源,以火源查找与灭火的精确性和快速性为设计要求。以蜡烛模拟火源,随机分布在场地中,模拟灭火场地如图1所示。
2 系统工作原理及功能简介
本系统采用32位ARM内核单片机作为主机控制模块。采用红外避障传感器来识别墙壁和障碍物,用火焰传感器来检测火源。单片机对传感器识别到的信号加以分析和判断,通过对直流电机的控制实现小车前进和灭火的任务。系统工作原理框图如图2所示。
3 硬件设计
3.1 红外避障电路
红外避障传感器是一种集发射与接收于一体的光电传感器,根据高频调制的红外线在待测距离上往返产生的相位移推算出光束度越时间Δt,从而根据DCΔt/2计算出里待测物体的距离。这里选择纳英特公司的红外避障传感器,数字量输出,不需要进行AD转换,可直接连接单片机的IO口。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,额定工作电压为5V,可以广泛应用于机器人避障、流水线计件等众多场合。
如图3所示,本红外避障传感器引出三条接口线,分别对应VCC、GND、OUT。它的输出状态是0、1。即遇到障碍物时为低电平,没有遇到障碍物时为高电平。
3.2 火焰检测电路
火焰传感器是机器人专门用来搜寻火源的传感器。为了对火焰实现准确定位,我们采用多通道火焰传感器,使用多个火焰传感器协同感知的办法,来判断火源相对于机器人的位置。在安装时考虑检测的角度,将传感器安放在与火焰同高的水平面上。这些火焰传感器分布在机器人的传感器板的正前,正左,正右。火源传感器能够探测到波长在700纳米-1000纳米范围内的红外光,其中红外光波长在880纳米附近时的灵敏度达到最大。
在设计时首先设定一个阀值,开机默认阀值为100,可通过机器人单片机的程序来更改阀值,范围在20~200。机器人在行进过程中,如果测到的最大值小于阀值,则表示没有火焰,此时传感器采用折半查找的方法来寻找最大值,每次采集6个通道并找出最大值,保存好最大值以及其通道号,检测一次大概需要216uS,传感器上的指示灯呈流水灯状态。如果测到的最大值大于阀值,则表示有火焰,此时传感器采用追踪法来寻找最大值,每次只检测当前最大值所在通道以及其左右两边的通道,再比较这三个通道的数据,保存好其中最大值以及其所在通道号,将此次最大值的通道号作为下一次检测时的最大值通道。火焰传感器原理图如图4所示。
3.3 直流电机驱动电路
直流电机的驱动电路采用H型PWM电路。用单片机控制驱动电路,使之工作在占空比可调的开关状态,精确调整电动机转速。电路中,H桥式电机驱动电路包括四个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。当IO2口为低电平,IO1口为高电平,此时Q1、Q4导通,Q2、Q3截止,电动机正常工作。改变IO2口的高电平周期,即改变PWM调制脉冲占空比,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。直流电机控制电路图如图5所示。
3.4 控制主板设计
本灭火机器人的主机控制模块采用32位ARM内核的单片机,该控制器存储容量大、运行速度快、外围接口丰富、稳定可靠,支持C语言编程,方便编程。满足设计所需的AD转换、LCD液晶显示、電机控制、按钮控制等要求。该控制器采用3.3V供电,工作电流在20mA以下,可谓是低功耗节能的控制器。为了精确定位机器人的行走方位,在设计时还安装了指南针传感器,方便机器人方位的确定。主机控制模块原理图如图6所示。
4 系统软件设
4.1 家用灭火机器人系统总体流程
此部分是小车运行的核心部分,控制小车所有运行状况。系统总体流程是:小车启动后,由入口进入场地,能够避开障碍物前进,一旦检测到有火源,就由单片机控制启动风扇,进行灭火。灭火完成后,返回原地。然后继续前进,重复刚才的过程,直到小车达到出口处才表示结束本次任务。在此过程中,各个模块彼此配合,完成各自的任务。主程序控制流程图如图7所示。
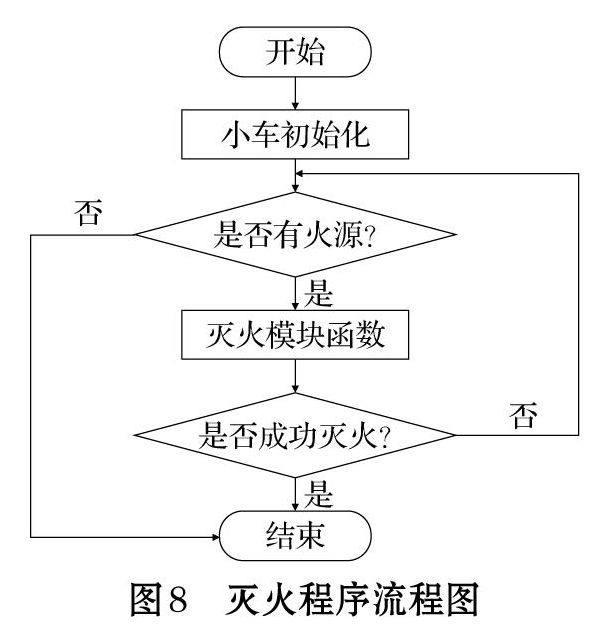
4.2 小车灭火的主程序软件流程图
如图8所示,首先对小车进行初始化,接着小车前进,前进的同时能够避开墙壁,通过过道,并能够检测到火源,如果检测到火源的存在,则停止前进,调整车头方位,启动风扇灭火,接着判断是否将火灭掉,如果火已经熄灭,则小车继续前进寻找下一个火源,如果没有熄灭则风扇继续开启。主程序流程图如图8所示。
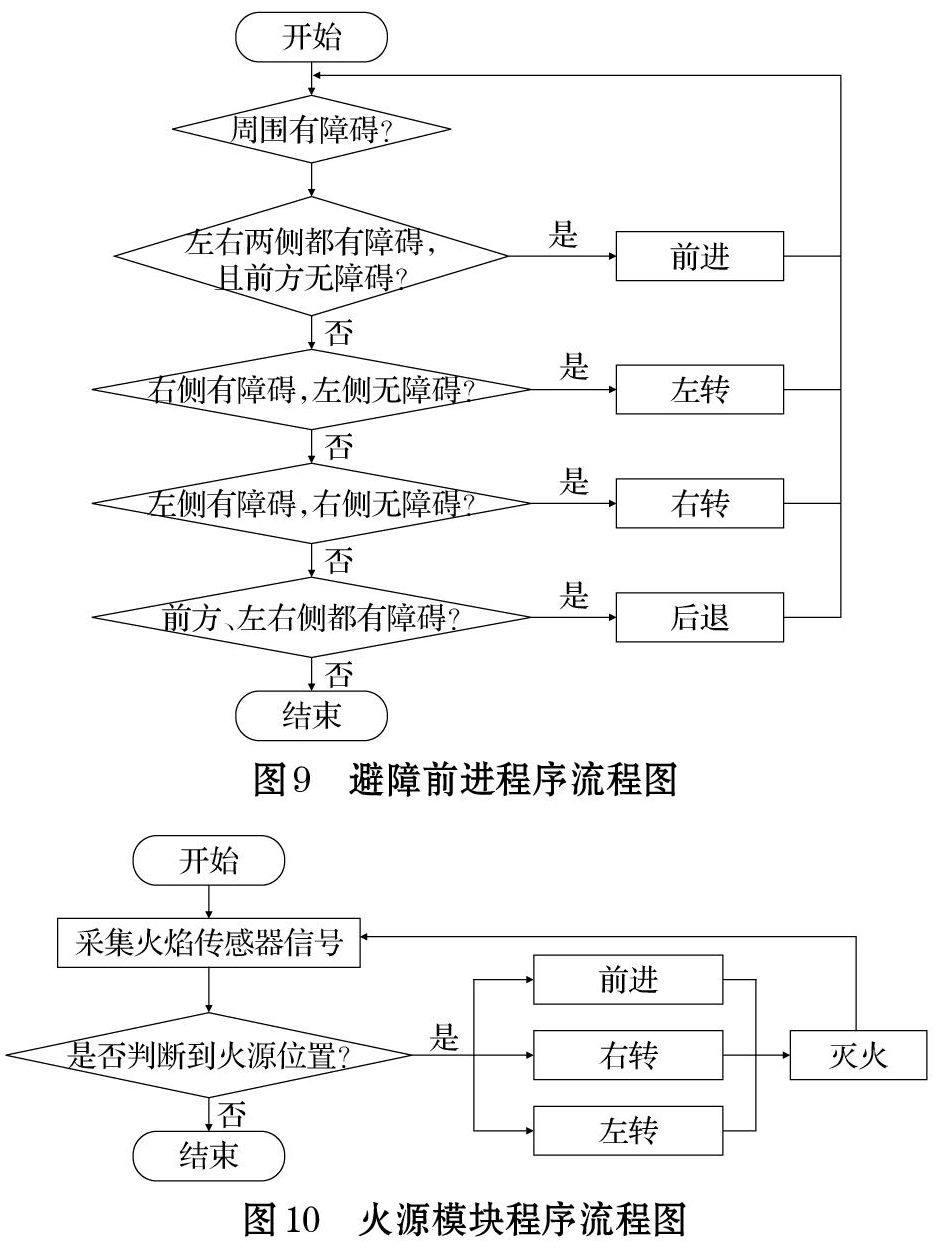
4.3 小车避障前进程序流程图
避障前进程序首先采集红外避障传感器发来的数据,判断当前小车周围是否有墙壁或障碍物,然后再执行操作,指挥小车在不与墙壁或障碍物相撞的情况行走。避障前进程序流程图如图9所示。
4.4 火源模块程序流程图
如果火焰传感器的信号显示火焰在小车的前方,则小车继续前进一段距离,到合适位置,启动风扇灭火;如果检测到火焰在小车的左侧,则小车左转一定角度,在正对火源方向启动风扇灭火;如果检测到火焰在小车的右侧,则小车右转一定角度,在正对火源方向启动风扇灭火;若没有检测到火源则继续前进。火源模块程序流程图如图10所示。
5 结束语
本设计是基于实际比赛要求而设计的,并参加了比赛,取得了良好的成绩。各部分的设计以及各传感器的使用都是经过多次比较和多次试验而确定的。机器人历时10s内完成灭火任务。设计中采用了嵌入式系统内核,大大提高了机器人处理信号的能力,采用了PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进。多通道外火焰传感器,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。
参考文献:
[1] 刘极峰.机器人技术基础[M].高等教育出版社,2006.
[2] 熊有伦,丁汉,刘恩沧.机器人学[M].机械工业出版社,1993.
[3] 张英,机器人灭火的设计方案[J].西安邮电学院学报,2006.5:
110-112
[4] 广茂达能力风暴智能机器人开发系统AS-UⅡ使用手册,2008.
[5] 梁毓明,徐立鸿.移动机器人多传感器测距系统研究与设计[J].计算
机应用,2008.28(6):340-343
[6] 曹小松,唐鸿儒,杨炯.移动机器人多传感器信息融合测距系统设计[J].
自动化仪表,2009.5:4-8
