Deep-water Riser Fatigue Monitoring Systems Based on Acoustic Telemetry
2014-04-26LIBaojunWANGHaiyanSHENXiaohongYANYongshengYANGFuzhouandHUAFei
LI Baojun, WANG Haiyan, SHEN Xiaohong, YAN Yongsheng, YANG Fuzhou, and HUA Fei
School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, P. R. China
Deep-water Riser Fatigue Monitoring Systems Based on Acoustic Telemetry
LI Baojun, WANG Haiyan*, SHEN Xiaohong, YAN Yongsheng, YANG Fuzhou, and HUA Fei
School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, P. R. China
Marine risers play a key role in the deep and ultra-deep water oil and gas production. The vortex-induced vibration (VIV) of marine risers constitutes an important problem in deep water oil exploration and production. VIV will result in high rates of structural failure of marine riser due to fatigue damage accumulation and diminishes the riser fatigue life. In-service monitoring or full scale testing is essential to improve our understanding of VIV response and enhance our ability to predict fatigue damage. One marine riser fatigue acoustic telemetry scheme is proposed and an engineering prototype machine has been developed to monitor deep and ultra-deep water risers’ fatigue and failure that can diminish the riser fatigue life and lead to economic losses and eco-catastrophe. Many breakthroughs and innovation have been achieved in the process of developing an engineering prototype machine. Sea trials were done on the 6th generation deep-water drilling platform HYSY-981 in the South China Sea. The inclination monitoring results show that the marine riser fatigue acoustic telemetry scheme is feasible and reliable and the engineering prototype machine meets the design criterion and can match the requirements of deep and ultra-deep water riser fatigue monitoring. The rich experience and field data gained in the sea trial which provide much technical support for optimization in the engineering prototype machine in the future.
marine riser; fatigue monitoring; engineering prototype machine; underwater telemetry
1 Introduction
Marine risers have been used since 1949 in Mohole Project in the US (Leklong et al., 2008). In the last 10 years, the offshore oil and gas industry has pushed aggressively into deep and ultra-deep water. Marine risers are the only key connection between platforms on the water surface and well heads on the seabed (Anne, 2007; How et al., 2009; Sakdirat et al., 2005) in such harsh environments (Fig.1). Physically, marine risers are inherently long, slender, extensible, and flexible tubular structures and they tend to undergo the large amplitude motion subject to the severe environmental forces such as vortex shedding, current and wave forces in the ultra- deep waters. These motions, especially VIV (vortex induced vibration), can give rise to high rates of riser fatigue damage accumulation (Guo et al., 2013; Liu and Huang, 2013; Matthew et al., 2012; Modarres-Sadeghi et al., 2010; Li et al., 2010). As water depth increases, VIV becomes the supreme challenges for the marine risers’ security and the biggest uncertainties facing the riser engineers (Chaplin et al., 2005; Matthew et al., 2012; Mark et al., 2012; Michael et al., 2009).
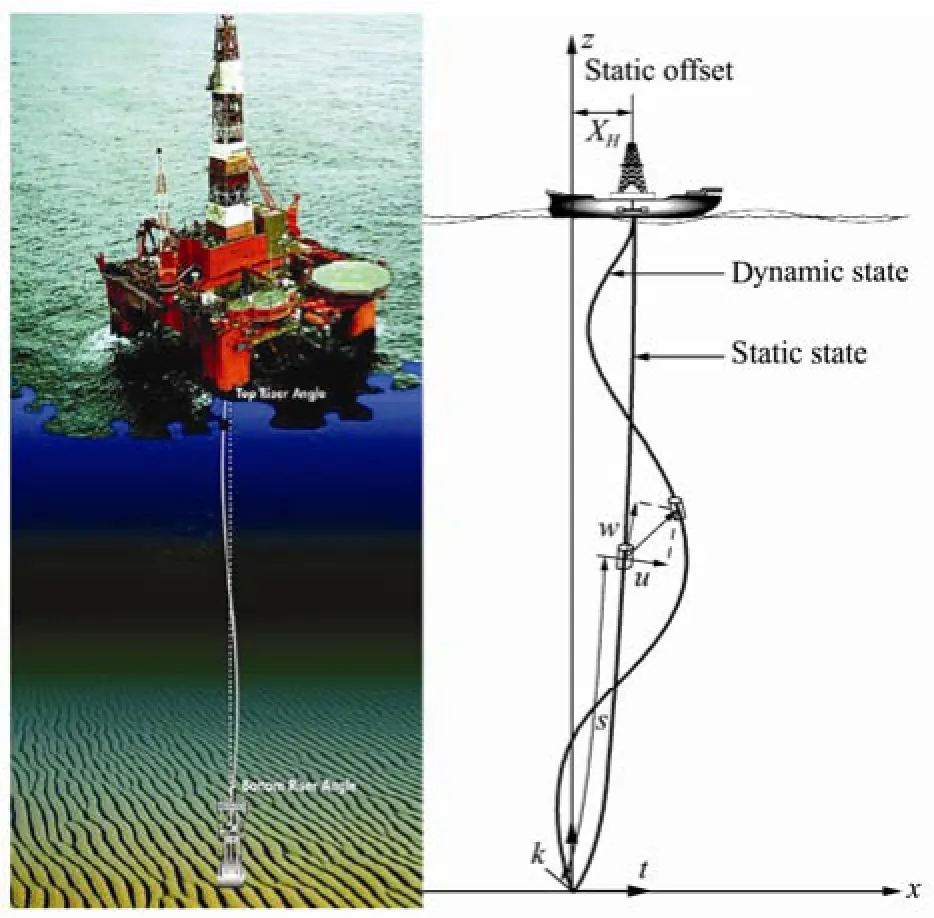
Fig.1 Schematic of riser and its dynamic response.
Riser monitoring provides information that enables the operator to confirm the integrity of the riser, have assist with operational decisions, optimize inspection, maintenance and repair schedules and procedures and calibrate design tools. Riser monitoring systems (RMSs) can be classified into two broad categories: condition monitoringand structural response monitoring (Brittany et al., 2007; Mukundan et al., 2009; Muthu et al., 2007; Enuganti et al., 2011). The condition monitoring mainly refers to ocean current measurement. The structural response monitoring includes measurements of acceleration, inclination, strain stress and so on. And furthermore, a variety of monitoring equipment has been used for riser fatigue monitoring (Pierre et al., 2008; Ricky and Pei, 2008; Metin et al., 2009; Shreenaath et al., 2007; Yiannis et al., 2011). However, the aforementioned method and measurement equipment are possessed by the overseas institutions, such as 2H offshore company, but cannot meet various new conditions. Firstly, the existing equipment with high cut-off frequency cannot detect the vibration of marine risers with larger length in the deeper water, because it is induced by frequencies lower than the cut-off frequency of existing equipment. Secondly, the said equipment only measures one kind of parameters, such as acceleration, inclination, strain stress and sea current. It will be more complex and expensive to measure multiple parameters using the said equipment. As a result, new methods are called for to take up the challenges from deeper water environment.
According to the different ways that power is supplied and communication is maintained with the monitoring equipment, RMS is ordinarily divided into three types, namely, standalone systems, hardwired systems and acoustic systems. The standalone systems have been most widely used in field monitoring, but they cannot transmit data in real time. Due to the requirement of cables, the hardwired systems are limited in terms of the number of locations. Besides, they are more complex and expensive than the standalone system. The acoustic systems are the key technology but also a challenging approach, due to the pros of their own and the cons of the other ways (Himanshu et al., 2008). The acoustic systems are cable-free solutions and can be installed either by remotely operated vehicles (ROV) or during riser installation. Compared with the standalone system, they are quasi-real time systems due to the teeny delay of data transmission and can provide operational support. Moreover, they are more simple and more cost-effective than the hardwired system. Of course, they are limited by the bandwidth of underwater acoustic channel.
With the depth of water increasing, the length of riser increases accordingly. As a consequence, the VIV is in a lower frequency range (Li, 2010), and the existing monitoring equipment will become invalid because of the high filtering cut-off frequency.
Following the demand of study on the Deep Ocean Oil and Gas Field Development Project of Major National Science and Technology in China, the detecting algorithm and telemetry method for marine riser fatigue in deepwater and ultra-deep-water have been studied recently (Li et al., 2011a, 2011b, 2012; Wang et al., 2011). A new marine riser fatigue acoustic telemetry scheme is proposed in this paper. An engineering prototype machine is developed based on the proposed scheme. After hundreds of times of laboratory tests and lake experiment, a field experiment of the engineering prototype machine was done on the 6th generation deep-water drilling platform HYSY-981 in the South China Sea from June, 2012 to August, 2012. The experimental results of the engineering prototype machine have made a huge impact. The technique will fill up the gap of deep-water equipment in China and offer technical support for exploration and production of offshore oil and gas in deep-water and ultra-deepwater environments.
2 Method and Framework of Riser Monitoring
In order to acquire the riser fatigue parameters at first time farthest, the acoustic telemetry scheme is employed in the marine riser fatigue monitoring scheme, as shown in Fig.2a. The riser fatigue monitoring system consists of two main parts, namely the upper computer and the lower computer. The underwater fatigue parameters measuring and transmitting equipment is regarded as the first section, and so is the lower computer. The data receiving and dis-playing equipment at the drill site is the second section, the upper computer. The marine riser’s VIV, inclination, stress and ocean current speed are measured by their own measurement module respectively. These parameters are processed, stored and transmitted successively, illustrated in Fig.2b, with the corresponding methods under the control of MSP430 Single Chip Microcontroller from Texas Instruments.
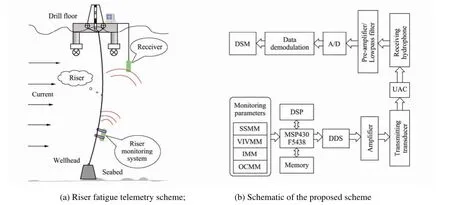
Fig.2 Riser fatigue telemetry scheme.
The acoustic signals transmitted by transmitting transducer are transformed into electrical signals by the receiving transducer. After Pre-amplifying and low pass filtering at receiver, A/D conversion, and data demodulation, the measured fatigue parameters are displayed and stored at upper computer. An engineering prototype machine, which has been patented (Xu et al., 2010 and 2011), is developed followed the schematic mentioned above. Fig.3 shows the machine. The detection module includes SSMM, VIVMM, IMM and OCMM, which are specified in the appendix.
The smart sensor is utilized for measuring VIV and inclination. The FBG sensor undertakes the task of riser strain-stress detection. The ocean current speed is detected by a universal current meter based on magnetic induction, which is the invention patent formed in this project (Jiang et al., 2010).
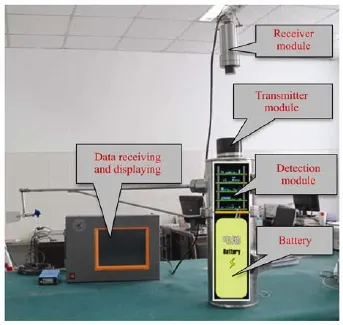
Fig.3 Picture of engineering prototype.
3 Key Techniques
Compared to the existing riser monitoring systems, the breakthrough and innovation in the proposed engineering prototype machine are as follow.
3.1 Current Monitoring
The universal current meter based on magnetic induction measures the current speed where the lower computer is placed. The current vertical profile can b e achieved through the interpolation of multipoint measured current speeds. ADCP (acoustic Doppler current profilers) (Anne, 2007), to our best knowledge, is the one and only ocean current measurement equipment used for the offshore petroleum field. The power dissipation of ADCP is proportional to its measuring depth. The universal current meter is superior to ADCP in accuracy, power dissipation and cost.
3.2 Inclination Monitoring
The existing angle measurement is of the 2D style (x-y, x-z or y-z). However, the marine riser inclination along the z axis is the most important and limited to 10 degrees. One novel method is proposed for inclination monitoring using:

where α, β and θ are respectively the inclination relative to x, y and z axes to be measured.
The proposed method can reduce energy consumption greatly according to formula (1). The inclination data is transmitted in the form of frame. The angles α, β and θ have the same length of frame, which is assumed to be L bits. Compared to the existing method that angle data with two L bits need to be transmitted, the length of angle data with L bits in the proposed method reduces by one half. Meanwhile, the time of data transmission also decreases. As a result, energy consumption will reduce accordingly.
3.3 Acceleration Monitoring
The inherent frequency of riser is in inverse proportion to its length. As the riser length increases, the lower frequency would be excited by VIV. For example, the lowest inherent frequency of riser with 3000 m length is about 0.019 Hz (Li, 2010). As a result, lots of existing acceleration measurement equipment becomes out of action, due to the high cut-off frequency, e.g., the cut-off frequency of INTEGRI pod™-AM, which is the typical case of 2H offshore Inc, is 4.5 Hz, and in the reference (Tang et al., 2012) it is 1 Hz. They all cannot match the riser fatigue monitoring in deep and ultra-deep water. However, the cut-off frequency of the proposed engineering prototype machine is 0 Hz and its sampling frequency is 25 Hz, which permits a wider frequency range to be monitored.
Last, the engineering prototype machine is an integrated fatigue monitoring system. To our best knowledge, kinds of existing riser monitoring systems are single- parameter monitoring system. Strain and vibration are the parameters that can be interchangeable in theory. In practice the measurement of strain or vibration present its own sets of challenges (Himanshu et al., 2008). The integrated monitoring system possesses the comparative advantage and comprehensive advantage compared with the oneparameter monitoring system.
4 Sea Trials
The accuracy, measuring error and feasibility of every parameter measurement module of the engineering pro-totype machine had been tested through laboratory tests. And lake experiments made at Fengjia Shan Reservoir of Shaanxi province in Nov. 2010 tested and verified the data transmitting and the good performance of underwater acoustic communication. After hundreds of times of laboratory tests and lake experiments, sea trials of the machine were done on the 6th generation deep-water drilling platform HYSY-981 in the South China Sea from June 30, 2012 to August 10, 2012. The seal housing was installed by a special ribbon during riser installation as shown in Fig.4. The receiving transducer was launched into water 100m below sea level to avoid thermocline.
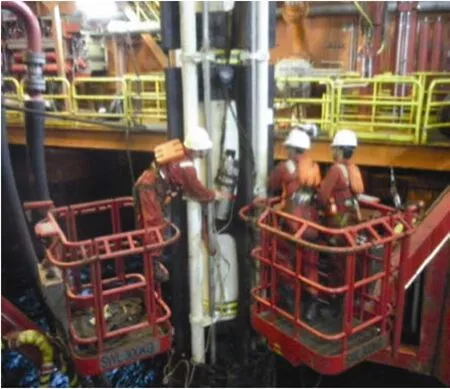
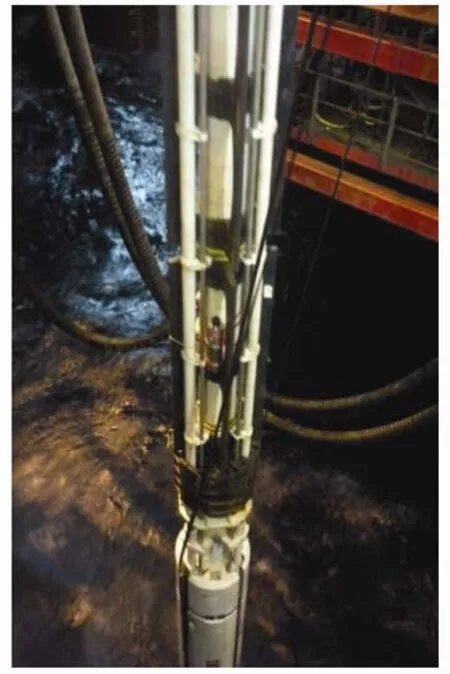
Fig.4 Pictures of seal housing installation.
The data transmitting through underwater acoustic channel are affected critically by ambient noise. The frequency range of the engineering prototype machine is 8 kHz-12 kHz. According to the ambient noise frequency spectrum around the platform HYSY-981 shown in Fig.5, the needed frequency range is smooth and no noise interference exists. It proves that the frequency range is in point and the sea trials show the system’s feasibility and reliability.
The interface of data receiving and data displaying is illustrated in Fig.6. The received Bauhinia pattern transmitted by lower computer before fatigue data transmitting signifies the excellent underwater acoustic communication performance. The received fatigue parameters aredrawn in red line.
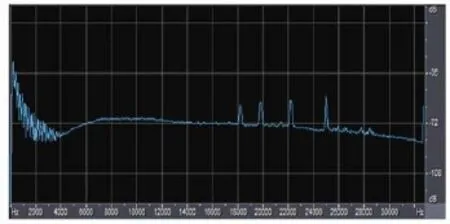
Fig.5 Ambient noise spectrums around HYSY-981.
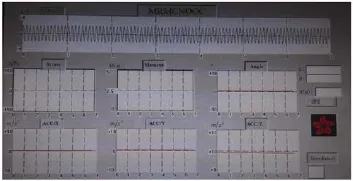
Fig.6 Interface of data receiving and data displaying.
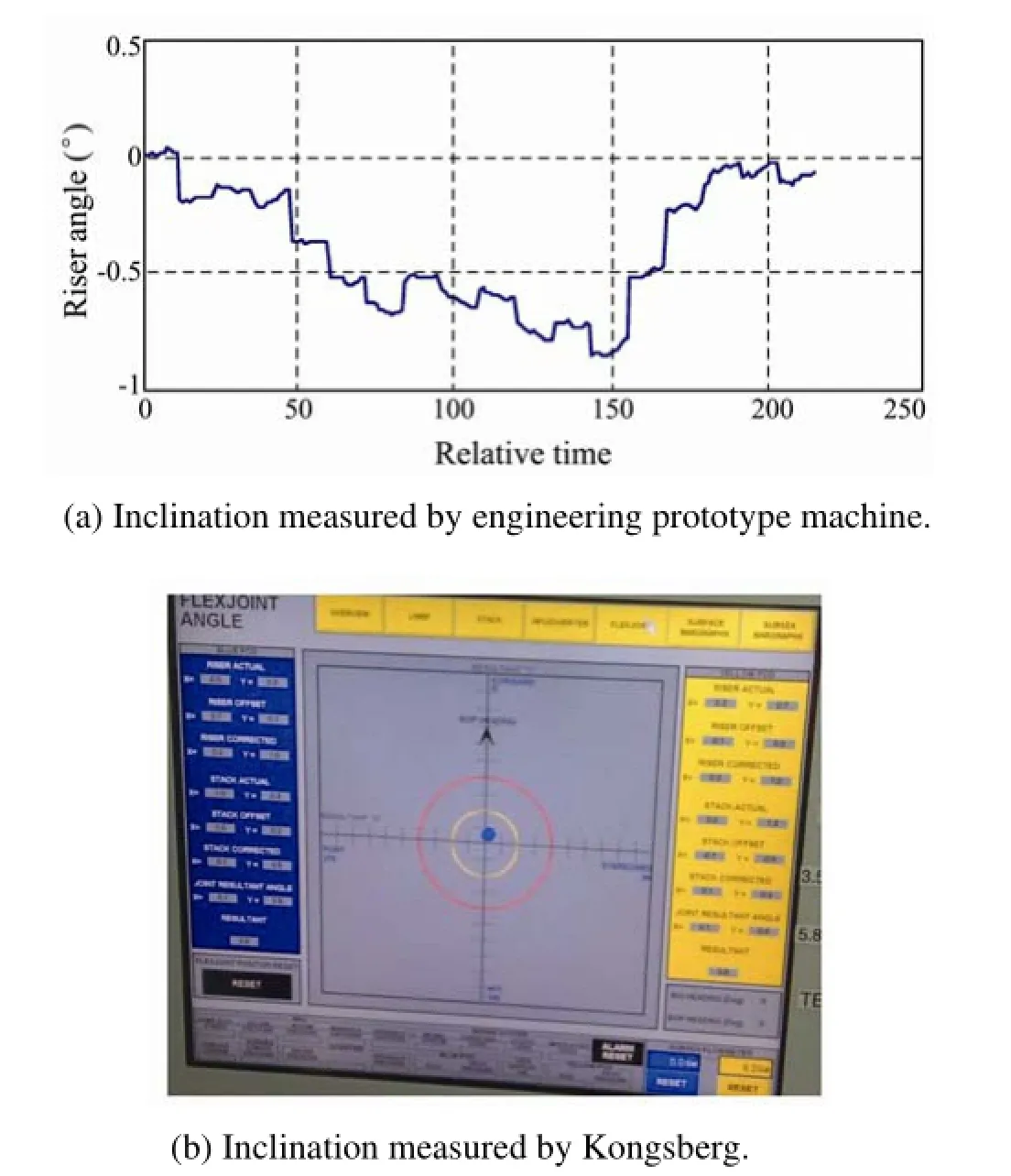
Fig.7 Inclination data chart.
Because of the confidentiality and operation limitations of the platform HYSY-981, only the inclination measurement results are demonstrated in this paper. The risers moved from 0 m to 12 m under the manipulation by drilling platform. The inclination changing process was monitored and recorded by two monitoring systems. The inclination data are shown in the left diagram of Fig.7. The horizontal axis stands for sampling data numbers and the vertical axis indicates the inclination data of marine riser. The right picture displays the inclination measured by the Kongsberg Riser Management System that has been employed by the deep-water drilling platform HYSY-981. The monitored inclination changing process by the engineering prototype machine is in agreement with that by Kongsberg system. The measuring error in the proposed system is less than 5% compared to Kongsberg.
5 Conclusions
Marine risers are the only key connection between platforms on the water surface and well heads on the seabed. Their fatigue and failure induced by dynamic response can not only diminish its fatigue life, but also lead to economic losses and eco-catastrophe. One marine riser fatigue acoustic telemetry scheme is proposed and an engineering prototype machine has been developed. The proposed integrated fatigue monitoring system has many breakthroughs and innovation.
The sea trial results obtained from the 6th generation deep-water drilling platform HYSY-981 in the South China Sea show that the proposed scheme is feasible and reliable and the engineering prototype machine developed meets the design criterion and can match the requirements of deep and ultra-deep water riser fatigue monitoring. The rich experience and field data gained will provide much technical support to optimize the design of the engineering prototype machine in the future.
Acknowledgements
This work was supported in part by the National Science and Technology Major Project of China (2011ZX 05026-001-06), and the National Natural Science Foundation of China (51249005; 60972153).
Appendix
Nomenclature
DDS: Direct Digital Synthesis
DSM: Display System Module
DSP: Digital Signal Processor
IMM: Inclination Measurement Module
OCMM: Ocean Current Measurement Module
SSMM: Stress Strain Measurement Module
VIV: Vortex Induced Vibrations
VIVMM: VIV Measurement Module
UAC: Underwater Acoustic Channel
Anne, M. R., 2007. Modeling and control of top tensioned risers. PhD dissertation. Norwegian University of Science and Technology, Norway, 1-55.
Brittany, G., Elizabeth, F., and Madhu, H., 2007. The role of offshore monitoring in an effective deepater riser integrity management program. In: Proceedings of OMAE 2007: 26th International Conference on Offshore Mechanics and Arctic Engineering. San Diego, OMAE2007-29479.
Chaplin, J. R., Bearman, P. W., and Cheng, Y., 2005. Blind predictions of laboratory measurements of vortex-induced vibrations of a tension riser. Journal of Fluids and Structures, 21: 25-40.
Enuganti, P., Shakkari, P., and Constantinides, Y., 2011. SCR integrity management program using field data from a monitoring system. In: Offshore Technology Conference. Houston. OTC-21912-PP.
Guo, H. Y., Zhang, L., Li, X. M., and Lou, M., 2013. Dynamic responses of top tensioned riser under combined excitation of internal solitary wave, surface wave and vessel motion. Journal of Ocean University of China, 12 (1): 6-12.
Himanshu, M., Wolfgang, R., and Dave, W., 2008. Riser integrity monitoring techniques and data processing methods. ISOPE-2008-EF-01
How, B. V. E., Ge, S. S., and Choo, Y. S., 2009. Active control of flexible marine risers. Journal of Sound and Vibration, 320: 758-776
Jiang, S. Q., Xu, L. B., and Wang, H. Y., 2010. One kind of deep-water universal current meter based on magnetic induction. Patent pending number: 201010593428.3 (China Patent).
Leklong, J., Chucheepsakul, S., and Kaewunruen, S., 2008. Dynamic responses of marine risers/pipes tran sporting fluid subject to top end excitations. In: Proceedings of the Eighth International Society of Offshore and Polar Engineers Pacific/Asia Offshore Mechanics Symposium Bangkok. Thailand, November 10-14.
Li, B. J., 2010. Research on fatigue monitoring techniques of deepwater risers. Master thesis. Northwest-ernPolytechnical University, Xi’an, 1-32 (in Chinese with English abstract).
Li, B. J., Wang, H. Y., Shen, X. H., and Zhu, M. Y., 2011. A novel algorithm for riser vortexinducedvibration detecting. Computer Measurement & Control, 19 (6): 1273-1277 (in Chinese with English abstract).
Li, B. J., Wang, H. Y., Shen, X. H., and Zhao, R. Q., 2012. Telemetry method with low power consumption for marine riser fatigue monitoring. Computer Measurement & Control, 20 (5): 1211-1213 (in Chinese with English abstract).
Li, X. M., Guo, H. Y., and Meng, F. S., 2010a. Fatigue life assessment of top tensioned risers under vortexinduced vibrations. Journal of Ocean University of China, 9 (1): 43-47.
Li, X. M., Guo, H. Y., and Meng, F. S., 2010b. Stress analysis of top tensioned riser under random waves and vessel motions. Journal of Ocean University of China, 9 (3): 251-256.
Liu, J., and Huang, W. P., 2013.A nonlinear vortex induced vibration model of marine risers, Journal of Ocean University of China, 12 (1): 32-36.
Mark, C., Shyue, S. C., and Cary, G., 2012. Fatigue analysis of tether chain in hybrid risers. In: Proceedings of the ASME 31stInternational Conference on Ocean, Offshore and Arctic Engineering. Rio De Janeiro, OMAE2012-83954.
Matthew, B., Elizabeth,T., and Dhyanjyoti, D., 2012. Experi-mental evaluation of vortex induced vibration response of straked pipes in tandem arrangements. In: Proceedings of the ASME 31st International Conference on Ocean, Offshore and Arctic Engineering. Rio De Janeiro, OMAE2012-83772.
Metin, K., Wolfgang, R., and Shreenaath, N., 2009. Steel catenary riser response characterization with on-line monitoring devices, OMAE2009-79437.
Metin, K., Chen, J. H., and Curtiss, B., 2009. Tahiti online monitoring system for steel catenary risers and flowlines. OTC 19860.
Michael, A. T., Yin, F. J., and Mike, C., 2009. Benchmarking of shear7v4.5: Comparisons to full-scale drilling riser VIV data and legacy analyses. In: Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering. Honolulu, OMAE2009-79442.
Modarres, S. Y., Mukundan, H., and Dahl, J. M., 2010. The effect of higher harmonic forces on fatigue life of marine risers. Journal of Sound and Vibration,329: 43-55.
Mukundan, H., Modarres, S. Y., and Dahl, J. M., 2009. Monitoring VIV fatigue damage on marine risers. Journal of Fluids and Structures,25: 617-628.
Muthu, C., and Trond, S. M., 2007. Riser monitoring systems–then and now. Exploration & Production –Oil & Gas Review–OTC Edition, 82-85.
Pierre, B., Roy, S., and Mike, C., 2008. Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents, OMAE2008-57610.
Ricky, T., and Pei, A., 2008. Performance monitoring of deep-water risers. In: Proceedings of the ASME 27th International Conference on Ocean, Offshore and Arctic Engineering. Estoril, OMAE2008-57018.
Sakdirat, K., Julapot, C., and Somchai, C., 2005. Nonlinear free vibrations of marine risers/pipes transporting fluid. Ocean Engineering,32: 417–440.
Shreenaath, N., Mateusz, P., and Metin, K., 2007. Deep-water spar steel catenary riser monitoring strategy, In: International Conference on Ocean, Offshore and Arctic Engineering. OMAE 2007-29344.
Tang, D., He, F., and Shi, R. F., 2012. New-developed selfcontained acceleration measurement instrument used for offshore platform monitoring. Chinese Journal of Scientific Instrument,33(3): 689-694 (in Chinese with English abstract).
Wang, H. Y., Li, B. J., Shen, X. H., Jiang, S. Q., and Xu, L. B., 2011. Research on deep-water Riser VIV fati--guetelemetry monitoring. In: the 8th International Bhurban Conference on Applied Sciences & Technology. Pakistan, 5pp.
Xu, L. B., Wang, H. Y., and Jiang, S. Q., 2011. One kind of multiple point acoustic monitoring system for marine riser fatigure. Patent pending number: 201120001419.0 (China Patent).
Xu, L. B., Wang, H. Y., and Jiang, S. Q., 2010. One kind of seal housing used for deep-water information sensing and acoustic wireless transmitting. Patent pending number: 201010616028. X (China Patent).
Yiannis, C., Lee, T., and Prahlad, E., 2011. Steel catenary riser response identification based on field measurements. In: Proceedings of the ASME 30thInternational Conference on Ocean, Offshore and Arctic Engineering. Rotterdam, OMAE 2011-50148.
(Edited by Ji Dechun)
(Received September 24, 2013; revised April 29, 2014; accepted May 24, 2014)
© Ocean University of China, Science Press and Springer-Verlag Berlin Heidelberg 2014
* Corresponding author. Tel: 0086-029-88495759
E-mail: hywang@nwpu.edu.cn
杂志排行

Journal of Ocean University of China的其它文章
- The Formation of Wind Curl in the Marine Atmosphere Boundary Layer over the East China Sea Kuroshio in Spring
- Wind Wave Characteristics and Engineering Environment of the South China Sea
- Prediction of the Mooring Force of a 2-D Floating Oil Storage Tank
- An Experimental Study on the Wave-Induced Pore Water Pressure Change and Relative Influencing Factors in the Silty Seabed
- Fe-Si-Mn-Oxyhydroxide Encrustations on Basalts at East Pacific Rise near 13˚N: An SEM – EDS Study
- Seasonal Changes in Phytoplankton Biomass and Dominant Species in the Changjiang River Estuary and Adjacent Seas: General Trends Based on Field Survey Data 1959 - 2009