西门子手持单元在840Dsl 系统上的应用
2014-04-23张明洋刘洪强
张明洋 刘 旭 刘洪强
(沈阳机床(集团)有限责任公司,辽宁 沈阳 110142)
西门子手持单元(HHU)上设有一个20 位液晶显屏幕,可用于同步显示各机床轴的位置值、速度值以及主轴数据。手持单元上设有15 个按键,可以通过组合实现很强的控制功能,并且可以通过机床厂二次开发,增加一些提示信息、警示符号等。
西门子手持单元虽然功能很强,操作也很方便,但安装调试却有很大难度。因为西门子手持单元(HHU)并非插即用型产品,特别是对于“840D”及“840D sl”系列产品,手持单元与数控系统采用了MPI总线联接方式,相互之间的信号传输与接收均需要传输协议的支持。对于西门子840D sl 数控系统,在使用前,必须对手持单元(HHU)进行正确的硬件连接,通过硬件配置设置传输协议及传输速率,最后编制程序实现手持单元(HHU)的操作功能。
1 HHU 硬件连接
840D sl 系统中,HHU 需要通过转接盒连接到NCU 总线,端口号X136,HHU 必须要挂到总线的末端,且终端电阻开关的位置要打在ON 上。
转接盒上用于HHU 控制部分的端子板内部电路连接如图1 所示:其中1 和2(11 和12)是急停按钮的常闭触点,9 和10 是24 V 电源的输入端,3~6 接手轮信号,7、8、13 接使能键的输出端。
2 硬件配置
2.1 西门子840D sl 系统的硬件配置
西门子840D sl 系统的硬件配置主要包括NCU、NX10/15、ET200 等的组态,完整的配置如图2 所示。因为手持单元(HHU)用到NCU 的X136 MPI/DP 接口,所以需要在硬件配置中对X136 接口进行传输协议设置,双击图2 中NCU 的X136 MPI/DP 接口进进行MPI 属性设置,接口类型选择MPI,MPI 地址选择2,传输速率选择187.5 kbps,确定后,对硬件配置进行编译存盘以完成840D sl 系统的硬件配置。
2.2 HHU 的硬件配置
西门子840D sl 系统中NCU,MCP,PCU 等的数据传输使用的是internet 协议,而手持单元(HHU)与系统之间通过MPI 协议进行数据传输,所以必须对手持单元(HHU)进行正确的硬件配置才可以实现其在840D sl 系统上的使用。
首先,插入新的SIMATIC 300 站点,为方便区分,取名为HHU,如图3。进入HHU 站点,进行硬件配置,插入SIMATIC 300 机架,将CPU 拖入机架插槽2 中。CPU 可以为任意类型,此处以CPU314 为例。双击CPU314,点击属性进入MPI 属性设置界面,MPI 地址选择15,MPI 传输率为187.5 kbps。确定后,对硬件配置进行编译存盘以完成手持单元(HHU)的硬件配置。

图2 西门子840D sl 系统硬件配置
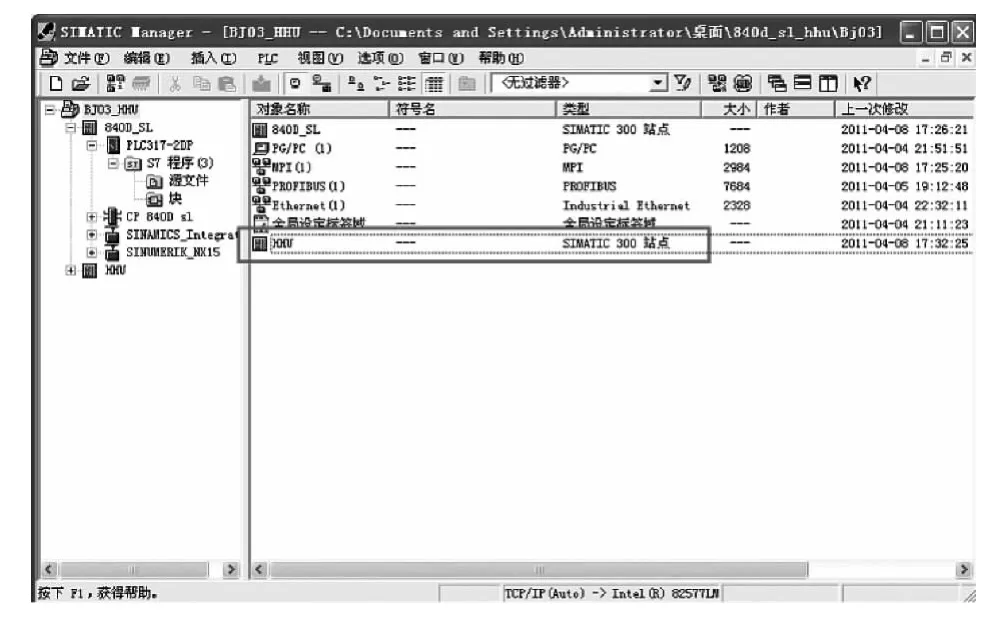
图3 插入新的SIMATIC 300 站点
2.3 全局数据的定义
要实现系统与手持单元(HHU)之间的数据传输,必须进行全局数据的定义。右键单击项目中的MPI网络,选择定义全局数据,如图4 所示。
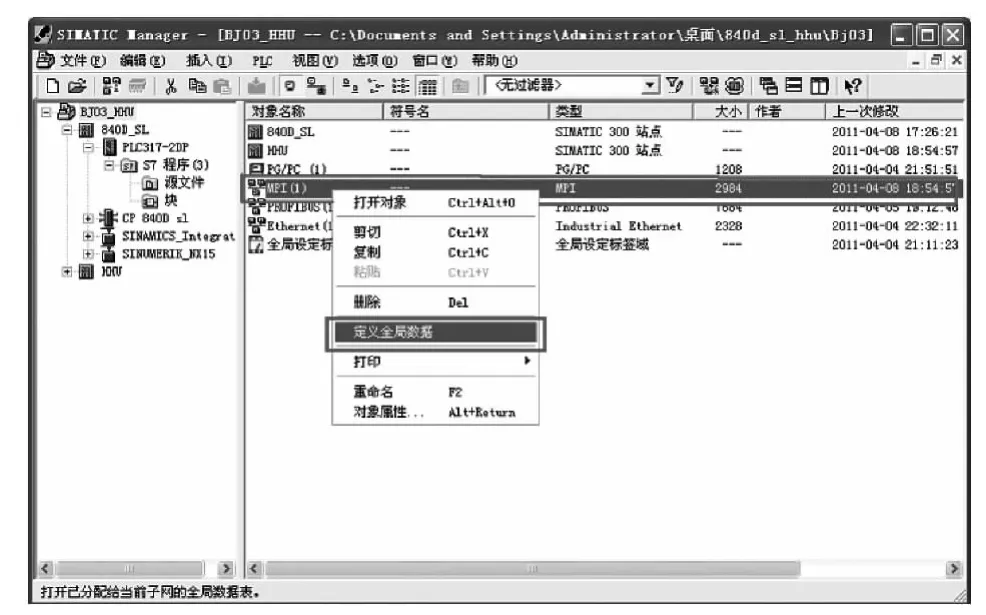
图4 定义全局数据

图5 HHU 的起始地址
进入全局数据定义界面后,双击“全局数据(GD)ID”右侧第一列进入“选择CPU”界面,双击840D_SL 站点,选择840D_SL 的CPU:本例为PLC317-2DP,然后点击确定;双击“全局数据(GD)ID”右侧第二列进入“选择CPU”界面,双击HHU 站点,选择HHU 的CPU:本例为PLC314,然后点击确定。如图5 所示。然后分别输入HHU 输入输出的起始地址及字节数。其中:
DB48-DB53 为HHU 到PLC 的输入信号(6 个字节)
DB69-DB79 为PLC 到HHU 的输入信号(22 个字节)
对于输出信号来说,840D_S 为发送方,对于输入信号来说,HHU 为发送方,分别选择DB77.DBB60:22及DB77.DBB48:6,点击发送方图标,点击编译图标,编译完成后下载到CPU,此处只需下载840D_SL 的CPU,HHU 的不需下载。下载界面如图6 所示。
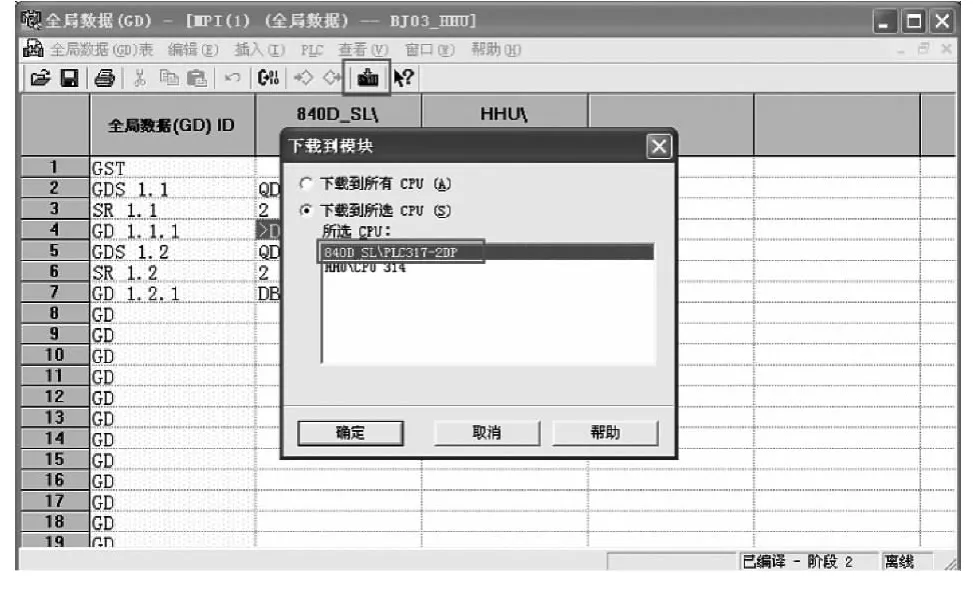
图6 下载定义完成的全局数据至CPU
2.4 手持单元(HHU)的设置
HHU 单元MPI 地址、传输率及GD 地址设置:同时按压手动及T2 按键,进入设置界面,通过“自动”按键及“+”按键进行设置,MPI 地址设为“F”即15,传输率设为187.5,GD 设置为1.1.1-1.1.2,如图7 所示。
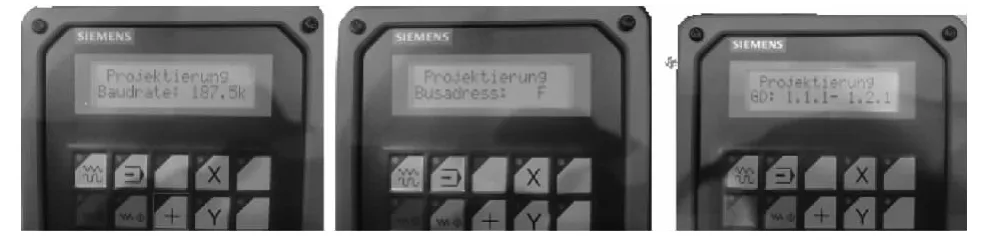
图7 手持单元(HHU)的设置
3 程序编写
3.1 PLC 程序的调整
在PLC 程序中,以下功能块是用来控制HHU 的。
(1)FC68:HHU 的处理程序,在OB1 里FC19 或FC24 的前面调用它。
(2)DB68:HHU 的输入和输出缓冲区,在源代码里要根据机床的实际情况重新修改,然后再汇编。
(3)DB69:FB2 的暂存数据块
在随系统带的toolbox 光盘里面有以上程序的源程序。使用时先找到源文件的压缩文件HHU.exe,点击该文件,源文件会展开到一个文件目录里面,然后打开STEP7,选择相应的STEP7 程序,在源文件目录下(sources)选择插入源代码,把刚才展开的源代码插入到这个目录即可。打开源代码后,根据机床的实际情况作些相应的调整,汇编生成程序的功能块。汇编时需先在STEP7 的option 里面选择德语的语句表表示方式(U E1.0 S A4.0),在符号表里加上“_DB68”代表DB68。否则在汇编时会有报警。
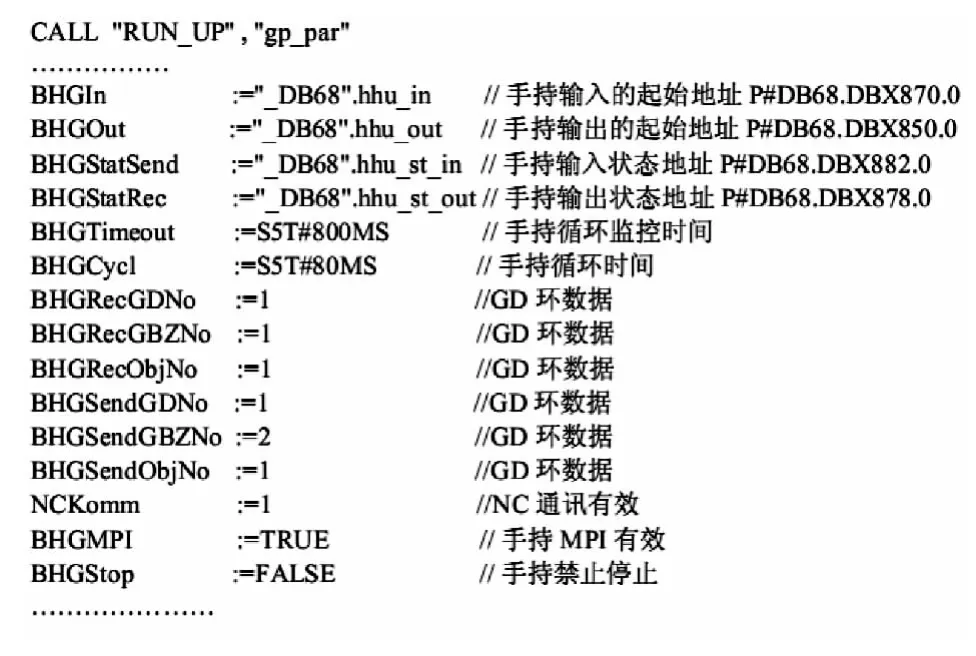
图8 初始化程序OB100 参数的修改
3.2 OB100 的修改
初始化程序OB100,主要用于PLC 上电后的初始化工作。具体的参数修改如图8 所示。
3.3 FC68 的调用
手持单元(HHU)的处理程序FC68 需要在主程序OB1 中进行调用,如图9。在FC68 调用前后与数据块DB77 进行数据交换。需要注意的是,此处不能用FC119,因为使用后,手持单元增量选择会失灵。
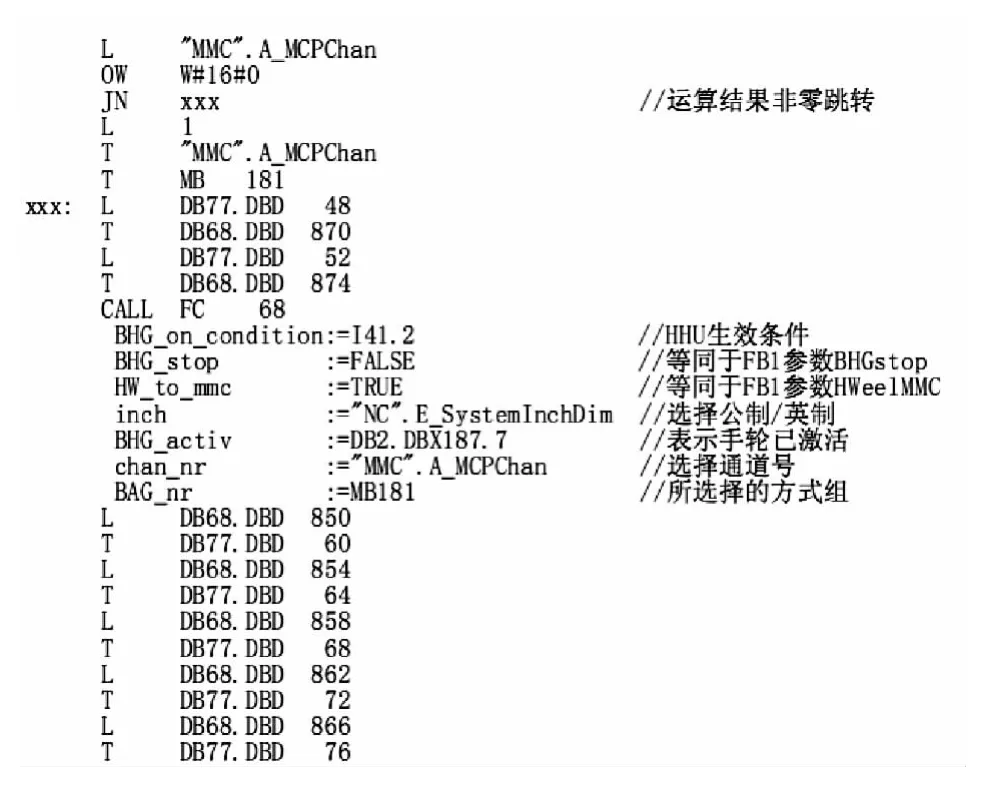
图9 FC68 的调用
4 结语
西门子手持单元(HHU)与840 Dsl 电路连接后,通过正确的硬件组态,软件编程实现了在手持单元上同步显示各机床轴的位置值、速度值以及主轴数据。
[1]DOCOND 2010.Siemens[Z].2010.
[2]胡国清.SIEMENS 840D 在多轴多通道数控机床中常用功能的开发应用[J].制造技术与机床,2004(11):107 -111.
[3]崔新,孟欣,侯林.手持单元(HHU)应用的几点心得[J].机械工程师,2002(5):53
[4]龙泉江,杨金韬.双MMC 和双HHU 在西门子840D 系统中的应用[J].华章,2012(15):307
