岸边起重机结构瞬态动力学分析
2014-04-21林利芬肖浩
林利芬, 肖浩
(1.武汉软件工程职业学院,武汉430205;2.中交二航局第四工程有限公司,安徽芜湖241007)
0 引言
TSJ160岸边起重机是为某工程岸边取梁专门设计的固定式悬臂吊机。吊具自重约200 t,最大吊重160 t。主要由:起升小车、主梁、立柱、吊挂、锚固、爬梯等部件组成。
岸边吊机在悬臂端取梁,然后把梁块运送到尾部,再把梁块放到移梁台车上,小车继续开到悬臂端;在此过程中,梁块需要准确地抓取和堆放,起升小车反复地启动和制动,引起底部锚固螺栓轴力的周期变化。本文利用Femap&NX Nastran有限元法,对悬臂端起吊过程进行瞬态动力学分析,得到底部锚固螺栓的轴力变化规律,希望对固定悬臂吊机的设计和使用提供一些帮助。
1 瞬态动力学理论
瞬态动力学(也称时间历程分析)是用于确定承受任意的随时间变化载荷的结构的动力学响应的一种方法[1],通过瞬态动力学分析,可以得到力、应力、应变随时间变化的规律。在进行有限元法计算时,首先要建立激励随时间变化的函数。然后在指定的激励点添加随时间变化的载荷。
2 激励随时间变化函数的建立

图1 启动制动时间曲线
TSJ160岸边起重机性能及参数:起重机最大悬臂10m,最大起重量160 t,起升速度为V=1.7 m/min,岸边吊机自重约197 t。悬臂端起吊时,由于需要调整吊挂的位置,起重小车需要启动、制动、再启动再制动的过程,该起升电机为变频电机,图1为启动制动时间曲线。根据启动制动时间曲线可以得到激励随时间变化的函数,如图2。其中纵坐标为激励的变化因子,横坐标为整个启动制动过程。
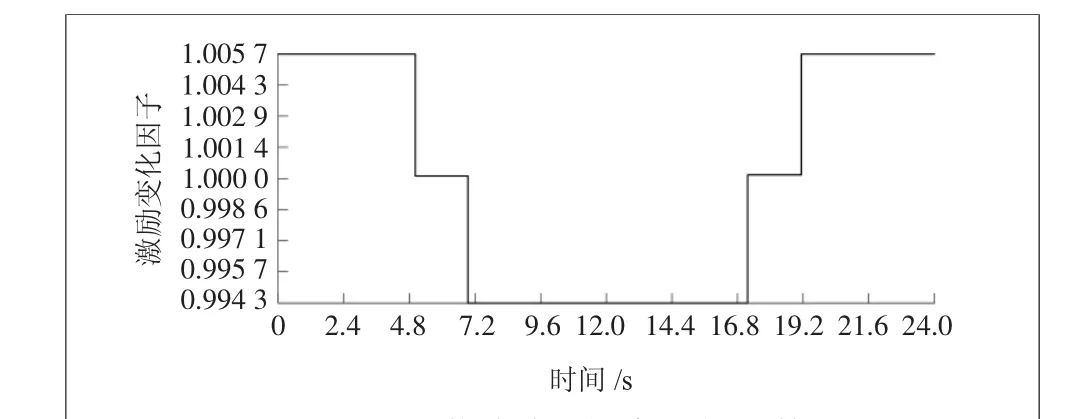
图2 激励随时间变化的函数
3 有限元模型建立
采用有限元计算软件Femap&NX Nastran建立岸边吊机有限元模型,岸边吊机上部为两层的桁架梁,下部立柱由板材焊接而成的桁架结构,主梁和立柱均采用梁单元模拟。图3为岸边起重机有限元模型。
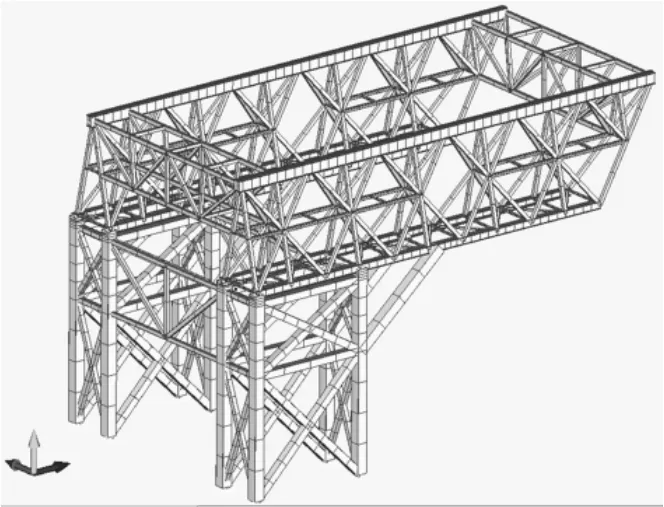
图3 岸边起重机有限元模型
约束条件说明:立柱与地面之间通过预埋的高强螺栓锚固,立柱与地面为固定连接。
4 悬臂端起吊过程的瞬态动力学分析
在对悬臂端起吊过程进行瞬态分析前,首先对悬臂端起吊进行静态分析,受拉锚固节点分别为:5 372、5 418、10 697、10 732;所受的静态分析下的锚点拉力分别为1 140 346 N、1 105 961 N、1 111 070 N、1 130 182 N。
激励随时间变化的载荷为阶跃载荷,由于响应滞后于施加的载荷,所以在发生阶跃的时间点,需要较小的时间变量来表达载荷变化,时间变量的取值为0.08 s,小于1/(180f),f为振动频率,岸边吊机为钢结构,阻尼系数取0.02[2]。图4为锚固螺栓拉力时间响应曲线,横坐标为响应的时间,共24 s,纵坐标分别为尾部锚固拉力节点 5 372、节点 5367、节点 10697、节点 10692上的拉力。
悬臂起吊过程中,尾部锚固的最大拉力分别为3 303 300 N、4 446 300 N、3 260 900 N、4 347 000 N,对应静态分析下的锚固拉力倍数分别为2.89、4.02、2.93、3.85。故在岸边起重机尾部锚固设计时,螺栓的安全系数应取到静力下的4倍。
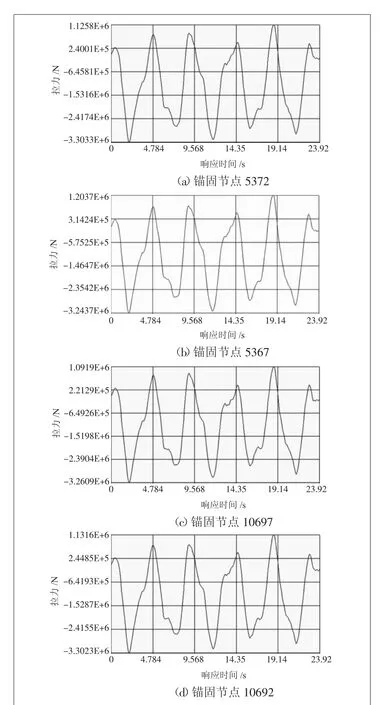
图4 锚固螺栓拉力时间响应曲线
5 结语
1)本文利用大型有限元分析软件Femap&NX Nastran对岸边悬臂吊机在悬臂端的起吊过程进行有限元分析,研究了悬臂端起吊对尾部锚固的影响,得出了一些有意义的结论。
2)在进行固定式悬臂吊机设计时,应对尾部锚固重视。
[参考文献]
[1]胡宗武.工程振动分析基础[M].上海:上海交通大学出版社,1999.
[2]王新敏.ANSYS工程结构数值分析[M].北京:人民交通出版社,2007.