并联混合动力城市客车驱动系统建模与仿真
2014-04-21吴海波何锋蒋雪生张晨
吴海波, 何锋, 蒋雪生, 张晨
(1.贵州大学机械工程学院,贵阳550025;2.奇瑞万达贵州客车股份有限公司,贵阳550025)
0 引言
全球能源危机和环境问题形势严峻,在节能减排的大背景下,低排放的新能源汽车成为各国汽车工业发展的方向。现阶段,混合动力汽车是传统汽车主要的替代车辆[1]。目前,汽车仿真软件ADVISOR广泛用于传统汽车和混合动力汽车的仿真与分析中,其仿真模型中驱动系统的结构为前驱模式,对其他驱动方式车辆进行仿真时要修改模型[2-3]。
目前,我国对ADVISOR的应用已展开了一定的研究。文献[4]概述了ADVISOR软件的特点和仿真策略,提出利用ADVISOR的现有模型,对不符合要求的模块进行修改或重建,可节省大量时间并确保模型的准确性和可靠性。文献[5]比较了ADVISOR前向路径仿真与后向路径仿真的差异,说明了混合仿真方法的实现方式。文献[6]~[8]基于ADVISOR的二次开发,对汽车的能量管理及控制策略进行了优化。
本文在ADVISOR软件平台上对驱动系统模型进行二次开发,建立并联混合动力城市客车驱动系统仿真模块,进行整车动力性分析。
1 混合动力城市客车动力系统建模
通过对混合动力城市客车进行受力分析,在ADVISOR建模源程序的基础上对前轮驱动的模型进行修改,建立混合动力城市客车驱动系统仿真模块。
1.1 混合动力城市客车行驶受力分析
假设混合动力城市客车在坡度为α的路面上,初速度为V0,在行驶过程中受到的空气阻力FW、滚动阻力Ff、坡度阻力Fi的作用,在附着力Fmax的驱动下所能产生的极限速度为 Vt,车辆受力如图 1 所示[9]。
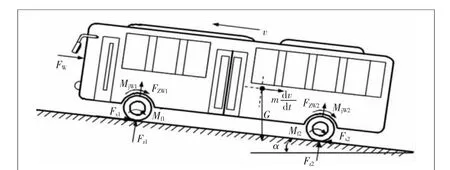
图1 汽车受力示意图
汽车的行驶驱动条件为

式中:m为整车质量;umax为最大附着系数;f1、f2分别为汽车前、后轮的滚动阻力系数;Vave为平均车速;ρ为空气密度;Cd为空气阻力系数;A为汽车迎风面积;a为车辆加速度,在时间Δt内,有

将式(2)~式(9)代入式(1),可以得出驱动力达到极限时,汽车产生的最高车速Vt1为:


此时,从整车模块传递过来的速度必须小于该速度。
在汽车处于附着极限时,制动力FX的最大值与驱动力Ft的最大值同为Fmax,但方向相反,有

同样,将式(2)~式(9)代入式(11),有
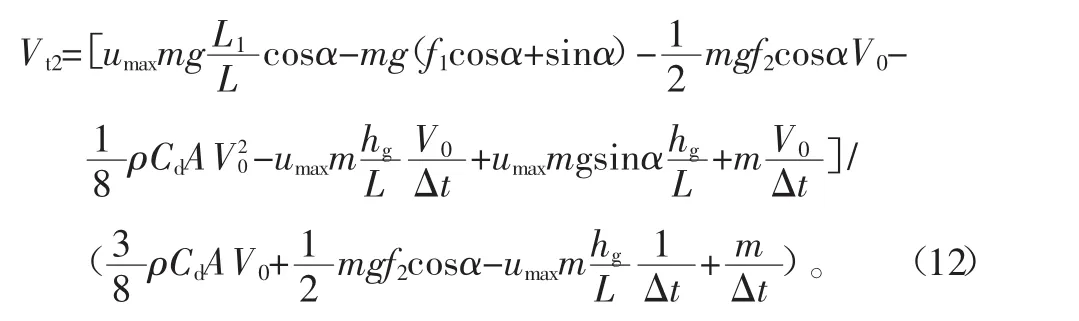
Vt2为制动力达到附着极限时汽车所能达到的最低车速,从整车模块传递过来的速度必须大于该速度。
1.2 混合动力城市客车整车驱动力和速度模块
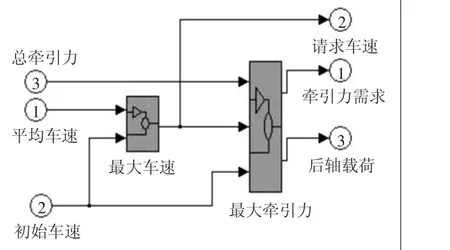
图2 混合动力城市客车驱动力控制模块
车轮/车轴模块中的驱动力控制子模块可根据汽车行驶的附着条件对车速和驱动力进行限制。根据上述所建立的混合动力城市客车动力学模型,在ADVISOR中所建立如图2所示的驱动力控制模块。

图3 限制车轮驱动的最大车速模块
根据式(10)、(12),可在 ADVISOR 软件中对车辆的速度模块进行重建,结果如图3所示。从车辆的整车模块传来所需的平均车速Vave_req从输入端口1进入该模块、初速度V0由输入端口2进入该模块,通过与限制端口1输出的平均车速比较,使其不超过极限附着情况下车辆能达到的车速。
在ADVISOR中建立的限制车轮驱动的最大驱动力模块,如图4所示。

图4 限制车轮驱动的最大驱动力模块
2 混合动力城市客车仿真参数
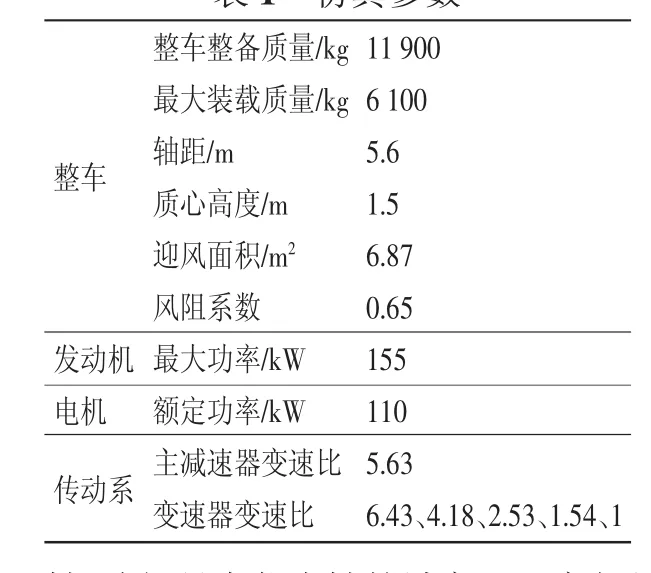
表1 仿真参数
混合动力城市客车的仿真包括车辆模块、发动机模块、电机与控制器模块、传动系统模块等,定义主要仿真模块的参数值如表1。
3 仿真结果对比分析为了验证所设计
的功能模块的正确性,选择具有代表性的城市——市郊循环工况(ECE_EUDC)进行仿真测试。
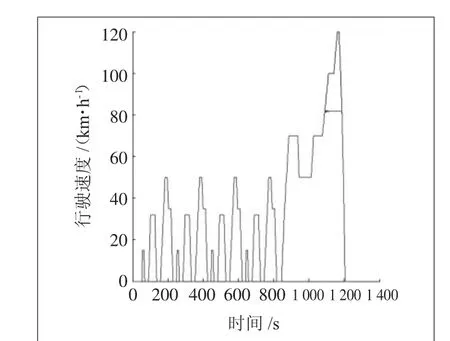
图5 道路循环请求汽车的行驶速度

图6 汽车发动机的转速
图5为ECE_EUDC 循环工况请求的混合动力城市客车行驶速度情况变化图,由于车辆的最高车速达不到循环工况需求的 120 km/h,在约 1 100~1 220 s之间内,车辆以81.8 km/h的最高车速行驶。发动机转速的仿真结果见图6,在道路循环的停车期间,发动机处于关闭状态,可节约能源。图7为电机输出的辅助扭矩,表明在循环工况需要汽车加速时,电机会输出扭矩,辅助发动机驱动车辆。

图7 电机输出的扭矩
在ECE_EUDC循环工况,对该并联混合动力城市客车进行仿真测试,其最高车速为 81.8 km/h,0~50 km/h的加速时间为 15.8 s,以20 km/h的速度行驶时最大爬坡度为16.1%。实车测验结果与仿真分析结果基本吻合。
4 结语
利用ADVISOR软件的开放性,在ADVISOR上对原有模型进行二次开发,建立混合动力城市客车的驱动系统仿真模型。在ECE_EUDC循环工况下对整车动力性进行仿真分析,仿真结果与实车测量结果相近,说明采用该方法建立的模型满足并联混合动力城市客车的动力性仿真分析需求。
[参考文献]
[1]SCHOUTENA N J,SALMANB M A,KHEIRA N A.Energy management strategies for parallel hybrid vehicles using fuzzy logic[J].Control Eng.Pract,2003,11(2):171-177.
[2]曾小华.军用混合动力轻型越野车辆动力总成匹配及控制策略研究[D].长春∶吉林大学,2002:10-17.
[3]AARON B,KRISTINA H,TERRY H.Advisor Documentation[R].April,2002:86-88.
[4]刘磊,刚宪约,王树凤,等.汽车仿真软件 ADVISOR[J].农业装备与车辆工程,2007(2):40-43.
[5]张翔,赵韩,钱立军,等.ADVISOR软件的混合仿真方法[J].计算机仿真,2005,22(2):203-206.
[6]石庆升,张承慧,崔纳新.新型双能量源纯电动汽车能量管理问题的优化控制[J].电工技术学报,2008(8):137-142
[7]辛世界,隆武强,范立云,等.并联混合动力城市客车控制策略研究[J].大连理工大学学报,2007,47(4):515-520.
[8]张昌利,张瑾瑾,杨盼盼.基于ADVISOR的双能量源纯电动汽车仿真[J].武汉理工大学学报:交通科学与工程版,2011,35(3):462-466.
[9]余志生.汽车理论[M].北京:机械工业出版社,2009:1-39.