日本机器人最新专利摘要选编
2014-04-20
日本机器人最新专利摘要选编
一、【发明名称】医疗机器人装置
【专利编号】JP 2014-100377 A
【公开日期】2014年6月5日
【申请人】佳能株式会社
本发明提供一种在体检时不用力传感器,能够将医疗机械与检体表面柔软接触的医疗机器人装置。
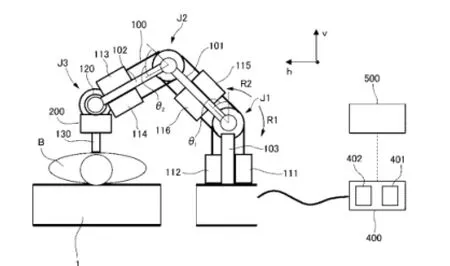
该医疗机器人装置由机械臂100、机械手200、控制装置400组成。控制装置400具有能够使链节102前端相对检体B表面水平方向移动的执行器111~116及控制驱动电动机。控制装置400在控制水平移动时,能够控制检体探针130沿检体B表面水平方向的第1刚性值和沿检体B表面垂直方向的第2刚性值。
【选择附图】
医疗机器人装置结构图
【图中符号说明】
100机器人机械臂
101链节(第1链节)
102链节(第2链节)
103固定链节
111执行器(第1执行器)
112执行器(第2执行器)
113执行器(第3执行器)
114执行器(第4执行器)
115执行器(第5执行器)
116执行器(第6执行器)
130超声波探针(医疗器具)
200机器人机械手
400控制装置
401运算部
402驱动源
500操作装置
B检体
J1关节(第1关节)
J2关节(第2关节)
J3关节(第3关节)
R 旋转方向
θ 旋转角
二、【发明名称】自主飞行机器人
【专利编号】JP 2014-119828 A
【公开日期】2014年6月30日
【申请人】斯考姆株式会社
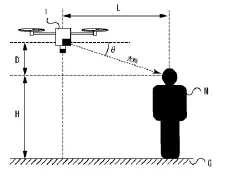
【摘要】本发明提供一种能够自动跟踪入侵者等移动体并获取移动体证据图像的自主飞行机器人。本系统能够精确控制照相机的摄影方向(设定角度θ)和与入侵者之间的距离,能够拍摄到入侵者的脸部图像。飞行机器人可以在保持与移动体M规定的间距L的情况下飞行跟踪移动体,根据间距距离、照相机拍摄条件信息和移动体的特征部位(例如头部)计算出能够精确拍摄移动体的飞行高度(H +D),计算出最佳飞行路径,拍摄出能够作为证据的图像。
【选择附图】
目标高度计算说明
【图中符号说明】
1 自主飞行机器人
G 地面
M 入侵者或移动体
D 飞行机器人与入侵者或移动体之间的垂直距离
H 入侵者或移动体距地面的高度
L 飞行机器人与入侵者或移动体之间的距离
θ预置的拍摄俯角
三、【发明名称】多关节双臂机器人生产系统以及生产线
【专利编号】JP 2014-121742 A
【公开日期】2014年7月3日
【申请人】川田工业株式会社
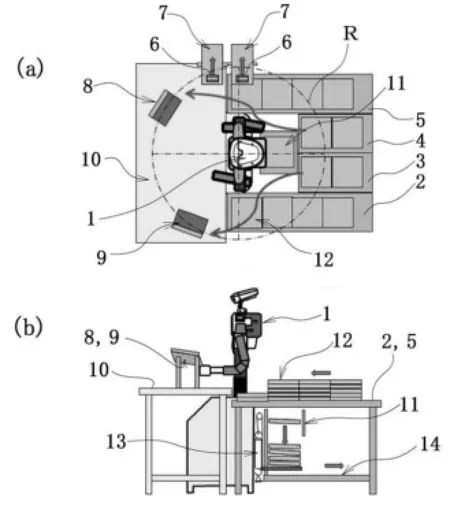
【摘要】本发明提供一种能够适应多品种部件加工的中小型机器人生产的生产系统。该生产系统由以下几部分组成,能够使双臂机械手在规定的作业范围内移动的多关节双臂机器人,能够在作业范围内提供搭载部件的部件传送盘及部件盘提供手段,部件取出后能够排列部件传送盘的部件盘排列手段等。多关节双臂机器人用双臂机械手从部件传送盘中取出部件,对部件进行加工,再将加工后的部件或成品放置在规定的位置上。当部件传送盘中至少有一个部件不在作业范围内时,通过部件传送盘提供手段移动部件传送盘;当搭载的全部部件都处于作业范围后,拾取部件。
【选择附图】
多关节双臂机器人生产线实施事例的平面图(a)和(b)侧视图。
【图中符号说明】
1多关节双臂机器人
2,3,4,5部件提供传送带
6部件台
7部件交换夹具
8,9部件传送盘放置台
10作业工作台面
11空部件传送盘排列处
12部件传送盘
13弹簧
14排列传送带
R作业范围
四、【发明名称】采用多关节双臂机器人装配环状工件的系统
【专利编号】JP 2014-128841 A
【公开日期】2014年7月10日
【申请人】川田工业株式会社
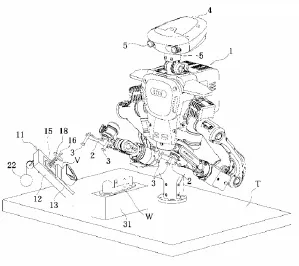
【摘要】本发明提供一种采用多关节双臂机器人自动装配柔软环状工件(例如环状皮带)的装配系统。
本系统的装配顺序是,由多关节双臂机器人1的双臂机械手2从环状皮带提供装置11上取下一根环状皮带V,装配在工件W上。整个系统由以下几个部件组成,即:安装在机座12上的环状皮带供给装置11;由两根支撑销子能够将数根环状皮带V沿其厚的方向分层放置的环状皮带补充器13;能够常态保持向机座12上方移动趋势的滑块15;能够支撑滑块15进行进退移动并常态保持向前移动趋势的第1销子;当滑块15处于前进位置时,插入在环状皮带补充器13上放置的第一根皮带和第二根皮带之间的第2销子;能够使第1销子16和第2销子交互移动到前进位置的传动部件等。
【选择附图】
多关节双臂机器人装配环状工件系统
【图中符号说明】
1多关节双臂机器人
2机械手(末端执行器)
3吸盘
4机器人头部
5照相机
11环状工件提供装置
12环状工件提供装置机座
13环状皮带补充器
15滑块
16第1销子
18圆盘
22平衡锤
31装配工作台
T机器人机座
V环状皮带
W工件
