无人机载LiDAR系统数据精度检测及误差分析
2014-04-18胡丹晖
郑 敏,胡丹晖,杜 勇
(1. 武汉大学 遥感信息工程学院,湖北 武汉 430079;2. 湖北省电力科学研究院,湖北 武汉 430077;3. 国网湖北省电力公司 检修公司,湖北 武汉 430050)
无人机载LiDAR系统数据精度检测及误差分析
郑 敏1,胡丹晖2,杜 勇3
(1. 武汉大学 遥感信息工程学院,湖北 武汉 430079;2. 湖北省电力科学研究院,湖北 武汉 430077;3. 国网湖北省电力公司 检修公司,湖北 武汉 430050)

通过对无人机载LiDAR系统获取的点云数据以及实测检查数据进行检测分析,得出不同点云密度以及不同地形条件下的数据精度分布情况,分析误差产生的原因。
LiDAR;LAS数据;精度检测;误差分析
LiDAR技术能够快速、准确地获取高精度和高密度的三维点阵数据[1],比传统摄影测量方法具有显著优势[2,3]。目前,国内外关于LiDAR点云数据的研究很多[4-8]。随着应用的深入,针对不同的行业需求研制专门的系统成为LiDAR技术发展的新方向。针对电力巡线需求,湖北省超能超高压电力科技开发有限公司、武汉大学和必威易(北京)商用飞机科技有限公司研制了基于无人直升飞机的超轻型LiDAR硬件及数据处理系统。本文针对该系统采集的数据进行分析,检测其产品(DSM、DEM和DOM)精度,分析其适用性。
1 系统简介
系统硬件为V750型无人直升机,搭载必威易公司研制的轻小型LiDAR设备BL-300,使用的处理软件为武汉大学研制的点云数据处理平台LiDARPC1.0。V750型无人直升机主要参数为:有效载荷大于30 kg,最大平飞速度40 m/s,最大动升限1 000 m,无地效悬停升限1 000 m,续航时间2 h,任务半径大于30 km。BL-300型轻小型机载LiDAR设备主要参数为:机身重量小于30 kg,扫描角度80°,飞行速度小于 60 km/h,飞行高度100~300 m,高程精度优于15 cm,水平精度优于20 cm。地面标志物主要辅助LiDAR数据精度检测,由三脚架和架设在其上的3根高度不同的水平数据采集杆组成。
本文LiDAR数据处理软件为武汉大学研制的点云数据处理平台LiDARPC1.0,如图1,主要有点云三维显示、漫游、缩放、伪彩显示、数据分割等基本操作,以及密度统计、距离测量、精度统计、滤波、约简、构网、断面计算和等高线生成等高级功能。
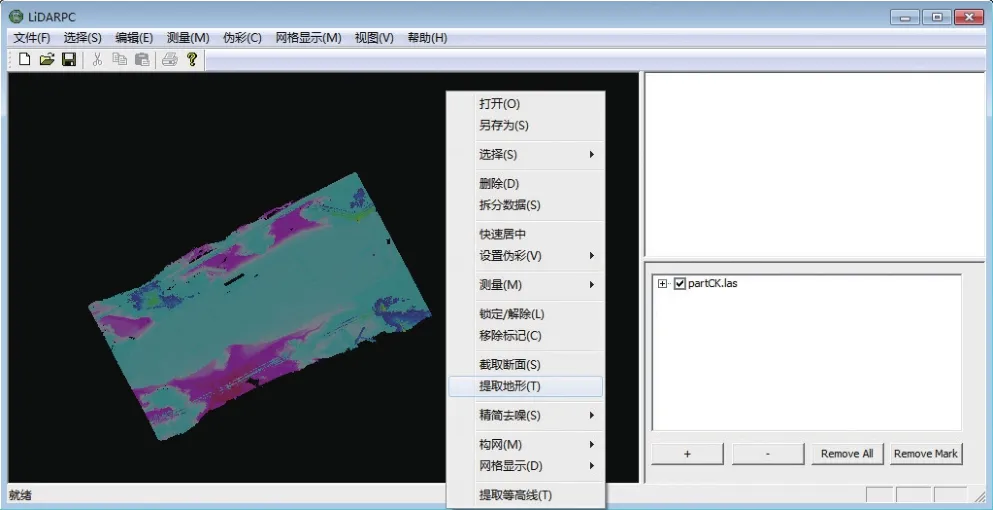
图1 LiDAR PC1.0点云处理平台
2 精度检测方法及指标
2.1 精度检测方法
数据处理流程如图2所示。量测和解算功能是指通过人工方式获取3根水平杆的端点,然后在XOY平面内解算其对应的3条直线方程,求交后对应3个点的坐标,求均值得(X,Y);高程值为顶杆所有点高程的均值Z。此时得到的三维坐标为标杆顶部坐标,通过标杆高度值h,则最终得到同名点坐标为(X,Y,Z-h)。所有同名点都解算出来后,读取检查点,进行精度检测,并最终以*.txt格式输出精度检测结果。
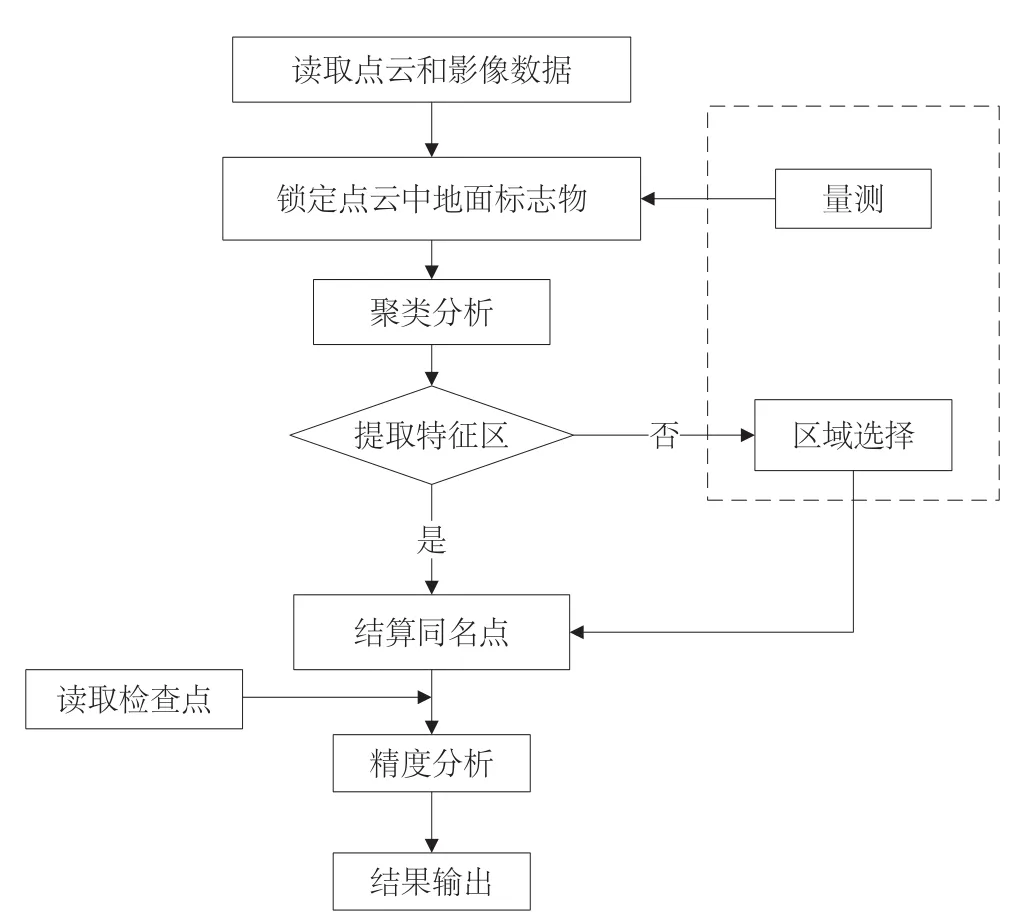
图2 精度检测方法实现流程图
2.2 精度检测指标
2.2.1 中误差
本文采用的测量精度评价方法为中误差法,计算式为:

式中,∆为真误差,∆=X1-X2;X1为测量值;X2为真实值;
n为实际测量数据个数。
2.2.2 极限误差
由中误差定义可知,σ越小,则绝对值较小的误差就越多。根据正态分布原理,大量同精度测量获取的数据列当中,误差值分布在(-σ,σ),(-2σ,2σ)和(-3σ,3σ)的概率分别如式(2)所示:

其中,P表示概率大小,Δ表示随机误差值。由此可知,在大量同精度观测数据中,误差绝对值大于σ的概率为31.7%,大于2σ的概率为4.5%,大于3σ的概率仅为0.3%。通常将3σ作为随机误差的极限值,即Δ限=3σ。实践中,常取2σ作为极限误差。
3 实验与分析
3.1 实验数据
实验线路区段位于河南省,线路全长约40 km,其中20 km按常规模式采集数据,航飞带宽2 km;另外20 km按比较高的点云密度采集数据(简称“高清区域”),航飞带宽1 km。线路区段所处地形为丘陵,最高点与最低点高程差约为60 m,最大坡度约55°。整个数据采集区域共设有7个控制点(如图3)和108个检查点(N1~N108)。为便于误差分析,这108个点被设置在不同的地形环境中,其坐标由GPS静态观测得到。最终,采集到的点云数据高清区密度约为13.12 点 /m2,低清区约为3.21点/m2。
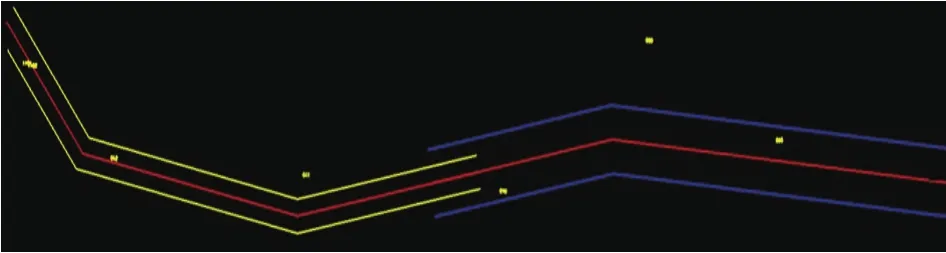
图3 高清区、低清区以及控制点(高清区范围黄线所示,低清区范围蓝色所示)
3.2 实验结果
通过地面标志物解算出检查点的同名点,将其坐标进行比较,输出检测指标结果如表1、表2。

表1 高清区点坐标误差概率分布/%
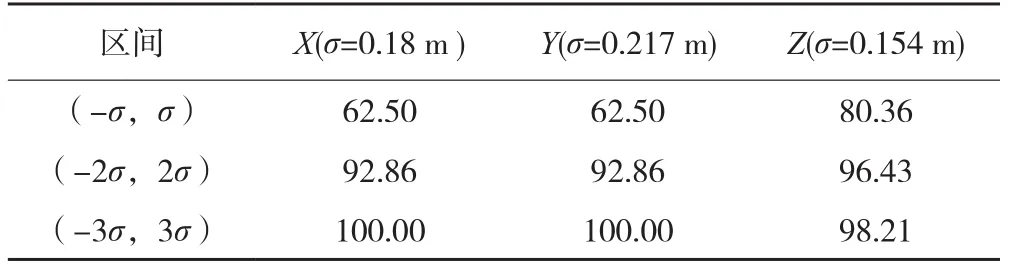
表2 低清区点坐标误差概率分布/%
高清区共有52个检查点,中误差:X方向为10.0 cm,Y方向为12.85 cm,Z方向为6.81 cm;误差概率分布情况:水平方向上X和Y误差分布情况相同,误差绝对值小于σ有37个点,位于σ和2σ之间有14 个点,位于2σ和3σ之间有1个点;Z轴方向上误差绝对值小于σ的有32个点,σ和2σ之间有18个点,2σ和3σ之间有2个点。
低清区共有56个检查点,中误差:X方向为18.0 cm,Y方向为21.65 cm,Z方向为15.43 cm;误差分布情况:水平方向上X和Y的误差分布情况相同,误差绝对值小于σ的有35个点,σ和2σ之间有17个点,2σ和3σ之间有4个点;Z轴方向上误差绝对值小于σ的有45个点,σ和2σ之间有18个点,2σ和3σ之间有2个点。
3.3 实验结果分析
3.3.1 点云密度差异对精度的影响
由于高清区和低清区点云密度不同,其对应点的三维坐标精度也存在差异,高清区坐标精度明显优于低清区。高清区水平中误差约为低清区的1/2,高程差异更明显,如表3。

表3 高清区与低清区点坐标精度对比/m
3.3.2 不同地表覆盖对点云精度影响
以高清区为例,分析不同地表覆盖对数据采集坐标精度的影响情况。高清区共有52个点,以Z轴为准,取2σ为极限误差,舍去2个高程误差值超过极限误差的检测点,则满足条件的点有50个。其中,21个点位于平坦区域(裸露区域),15个点所在位置具有一定的地形起伏,14个点位于植被覆盖区。裸露地区和植被覆盖区数据分析如图4。

图4 裸露区域和植被覆盖区数据分析柱状图
可以看出,植被覆盖区中误差明显比裸露区域高,在Y轴方向上表现尤为明显,这主要是由于部分区域植被覆盖密度相对较高,激光无法穿透,导致本算法获取的距离检测点最近的激光角点水平位置发生变化;而Z轴方向上裸露区域略小于植被覆盖区域,这主要是由于水平误差引起的。植被覆盖密集区点云密度为21.019 点/m2,同一区域裸露地表为13.729点/m2,植被滤除后,原植被覆盖区点云密度减小为12.866 点/m2。
3.3.3 地形起伏对点云精度影响
将平坦区域的21个点和地形起伏区域的15个点的相关数据进行比对,如图5所示。
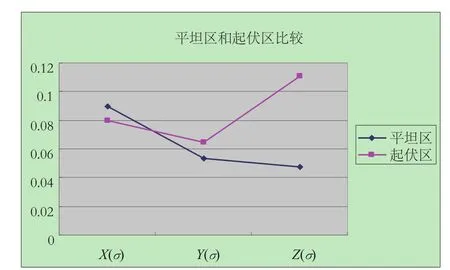
图5 平坦区和地形起伏区数据分析折线图
可以看出,X方向上地形起伏区中误差略低于平坦区,Y轴方向上则相反,总体上差异不大。Z轴方向上地形起伏区中误差明显高出平坦区,这主要是由于地形起伏区域,激光束光斑中心与周围的高程值存在差异,导致波峰位置发生扭曲和偏移,进而影响了LiDAR系统对激光角点位置的精确计算。此外,在地形存在一定坡度的情况下,水平误差也会对高程误差有影响。
通过上述实验可知,无人机载LiDAR系统采集数据能够满足1∶500地形图的成图需求,在行业应用,尤其是电力巡线中,具有较好的应用前景。
[1] Li Qingquan,Li Bijun. Research on Laser Range Scanning and Its Application [J]. Geo-spatial Information Science, 2001, 4(1): 37-42
[2] Goodwin N R, Coops N C, Culvenor D S. Assessment of Forest Structure with Airborne LiDAR and the Effects of Platform Altitude[J]. Remote Sensing of Environment, 2006, 103(2): 140-152
[3] Baltsavias E P. A Comparison between Photogrammetry and Laser Scanning [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1999, 54(2): 83-94
[4] Cossio T, Slatton K C, Carter W, et al. Predicting Topographic and Bathymetric Measurement Performance for Low-SNR Airborne LiDAR [J].IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(7): 2 298-2 315
[5] Jwa Y, Sohn G, Kim H B. Automatic 3D Powerline Reconstruction Using Airborne LiDAR Data[J]. IAPRS, 2009, 38(4): 105-110
[6] Kwan M P, Ransberger D M. LiDAR Assisted Emergency Response: Detection of Transport Network Obstructions Caused by Major Disasters [J]. Computers, Environment and Urban Systems, 2010, 34(3): 179-188
[7] Hecht R, Meinel G, Buchroithner M F. Estimation of Urban Green Volume Based on Single-pulse LiDAR Data [J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(11): 3 832-3 840
[8] Kabolizade M,Ebadi H, Ahmadi S. An Improved Snake Model for Automatic Extraction of Buildings from Urban Aerial Images and LiDAR Data [J], Computers, Environment and Urban Systems, 2010, 34(5): 435–441
P237.3
B
1672-4623(2014)05-0025-03
10.3969/j.issn.1672-4623.2014.05.009
郑敏,硕士,研究方向为机载激光雷达数据处理与应用。
2013-10-25。
项目来源:国家自然科学基金资助项目(41171289);国家科技支撑计划资助项目(2012BAH34B02);海洋公益性行业科研专项经费资助项目(2013418025-6);湖北省电力公司资助项目(201221506)。
