一种应用于汽车安全系统的LFMCW雷达
2014-04-14王占平
李 洋 李 浩 王占平 郭 婧
(电子科技大学 成都 610054)
0 引言
据统计,绝大多数的汽车安全是事故是因人的反应时间慢来不及采取相应措施导致的,汽车安全事故在各种交通事故中高居首位,这给人的生命安全带来了极大的威胁。汽车防撞雷达探测近距离的目标车辆,并预警存在相撞可能的车辆,提前提示驾驶员做出应对措施,或着自动控制驾驶进行紧急刹车或避让,这样就可以大大减少交通事故发生的机率,保护人的生命财产安全。
由于上述原因国内外一直在致力于汽车的研究。通常雷达的频段设计24GHz 或77GHz 两个频段,前者适宜近距离的探测,后者适用于远距离的探测,实际国外多将76-77GHz 作为首选。汽车雷达的应用有多个方面,像自动巡航控制、驾驶员盲点监测、紧急刹车、前视防撞警告等等。
一些半导体公司也不断推出适宜用于汽车雷达的器件或着给出解决方案。Freescale 半导体公司基于SiGe 工艺设计了77GHz 的VCO 和发射机,Infineon 科技在现有200GHz 技术的基础上,也推出了适用于汽车雷达的76-77GHz 的器件,TriQuint 半导体推出了多种77GHz 频段的采用MMIC 技术的产品,像基于0.13 微米假同晶高电子迁移率晶体管工艺的GaAs 低噪声放大器和异质结双极晶体管技术的GaAs 正交混频器[1]。
关于汽车雷达除了射频器件的问题,更多的研究重点在算法上。德国Benz 公司研制的雷达系统作用距离150m,可同时跟踪30 个目标;德国汉堡技术学院对体制进行了创新,结合了频移键控(FSK)和线性调频连续波(LFMCW),欧美、日本的一些汽车公司对这种雷达进行了深入研究,并取得了一定应用效果。国内也有高校、研究所和公司对汽车防撞雷达进行了研究。江苏赛博电子有限公司与高校合作研制雷达工作频率38GHz,可以同时监测20 个目标,最小检测距离为1m;中科院上海微系统所研制出的雷达系统测量距离>100m,测速范围>100km/h;电子科技大学对LFMCW 雷达进行了研究,提出了多种距离-速度去耦合的算法。
本文设计的LFMCW 雷达,设计在24GHz 频段,大宽带、体积小、功耗小,实现了对目标车辆进行距离、速度的测量。
1 LFMCW 雷达工作原理
连续波雷达测速的原理是多普勒频移,确无法同时对距离进行测量。本文采用对称三角波调制LFMCW 信号作为射频前端的发射信号,可以同时对距离和速度进行测量。三角波扫频工作带宽为B,时宽Tm,中心频率为fc,回波信号与发射信号混频并滤除高频分量后得到中频信号,差频的上边频为fbd,下边频为fbd。发射信号频率、接收信号频率与中频信号频率的关系见图1。
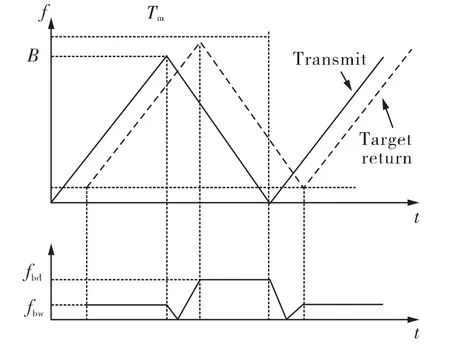
图1 线性调频锯齿波及差频
发射的信号为:

其中发射信号的瞬时相位可以写成

发射的瞬时频率:
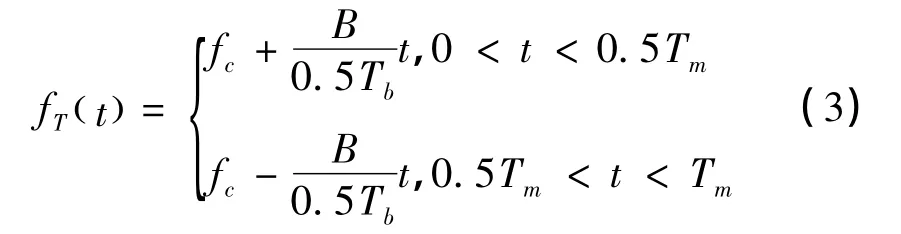
在上升段时发射信号可以写成

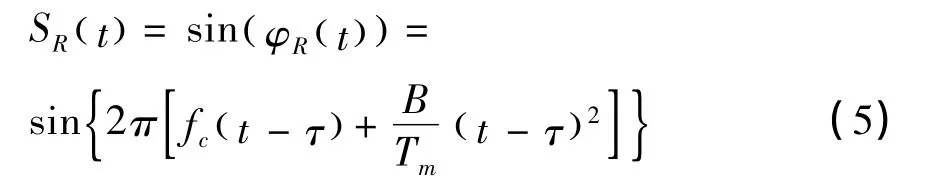
假设发射信号遇到一个目标,延时为τ,回波信号为:
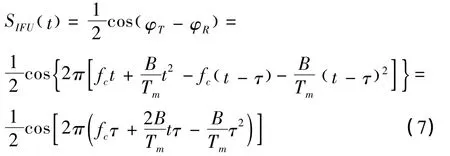
发射信号和回波信号混频,使用积化和差公式得

经过低通滤波器后,第一个和项为高频分量被滤掉,第二项分解为:
对于静止目标,v=0 时有

当v≠0 时,回波时延与速度有关,设初始距离仍为R,当目标是接近时

当目标是远离时

代入中频信号中可以得到

其中最后一项称为距离-速度耦合。忽略这一项,可以得到三角波上升段和下降段的中频信号[2]。
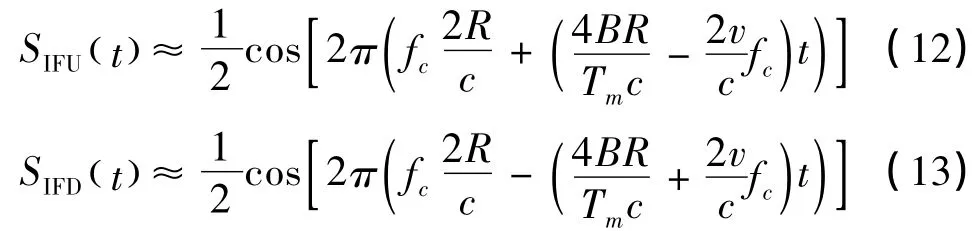
从上式可以得到上下差频信号[3]。
两式中的第一项为目标静止时的回波信号频率,第二项是因为目标运动产生的多普勒频率,这就可以使用差频可以计算得到距离和速度:
2 系统结构
设计的LFMCW 雷达系统组成包括射频前端、天线、数据采集和信号处理四个部分。射频前端产生一个对称三角波调制线性调频信号,经过天线辐射出去,发射信号经目标反射后由两个接收天线接收,与发射信号混频后得到中频信号;数据采集部分完成地中频信号的放大、抗混叠滤波和模数转换,并把数字化的信号通过USB 发送到PC 机;把接收的数据在Matlab 中进行信号处理,进行目标参数的计算。
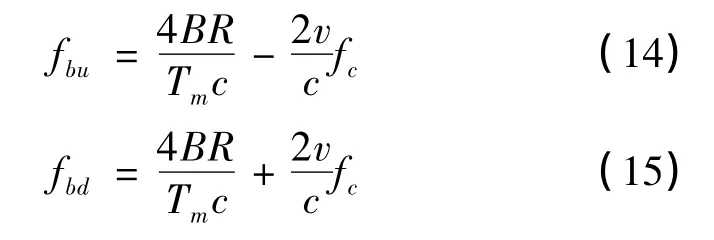
射频前端的结构如图2所示。射频前端使用VCO 产生调频信号,产生一个三角波调谐电压来控制VCO 的输出频率,一部分经天线发射出去,并耦合一部分作为混频器的本振,接收天线的回波经过低噪声放大后与其混频,经过低通滤波、放大后得到中频信号。由于VCO 的输出频率会随温度等因素有所漂移,所以在射频前端工作前需对其进行校正。校正是使用PLL 产生一个已知频率的固定点频,通过开关切换到混频器的回波输入,改变VCO 的调谐电压,当PLL 的输出频率和VCO 的频率相同时在中频处得到最大幅度的输出时的电压对应VCO 在此环境下的输出频率,进行多个点的测量后拟合可得到一个校正曲线,使用DAC 输出此电压可得到所需的频率输出。
图2 射频前端结构图
前端测试结果,图3 是频率为24.3GHz 的点频测试结果,图4 是扫频从24.0GHz 到24.6GHz 的测试结果。
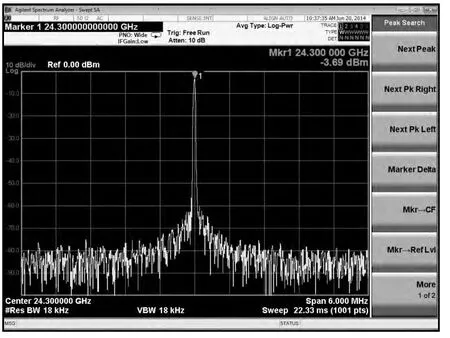
图3 点频测试结果
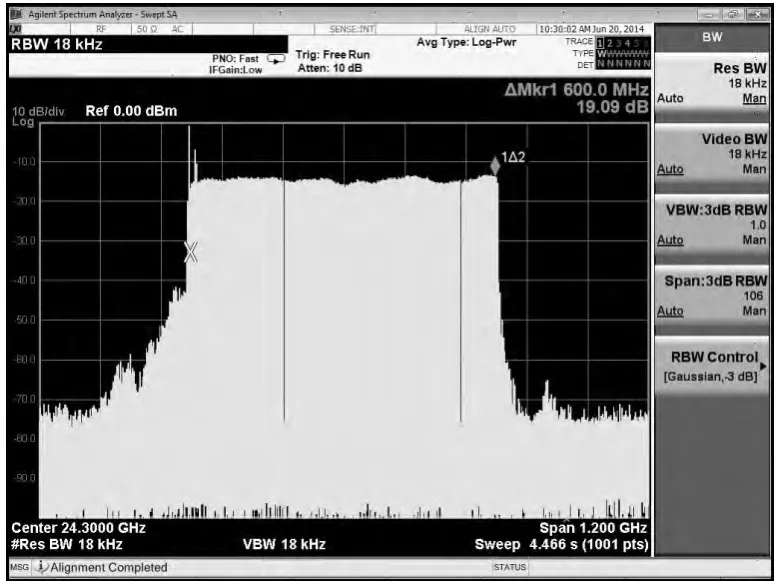
图4 线性调频测试结果
天线采用微带阵列,发射天线设计为一个8 ×6元线阵,频段为24.0 ~24.6GHz,增益大于20dB,副瓣为-20dB,E 面、H 面半功率波瓣宽度分别为15.7°和10.8°,有较好的方向性。
数据采集、处理部分电路框图如图7所示。中频信号首先经过放大、抗混叠滤波,调理后的信号由高精度的ADC 进行模数转换,数字化的信号由FPGA 进行预处理,进行数字滤波、增益控制、量程控制、累积、存储等功能,经过预处理的数据再由DSP进行复杂的算法的处理。同时FPGA 控制DAC 产生调谐VCO 调谐电压产生所需频率输出。
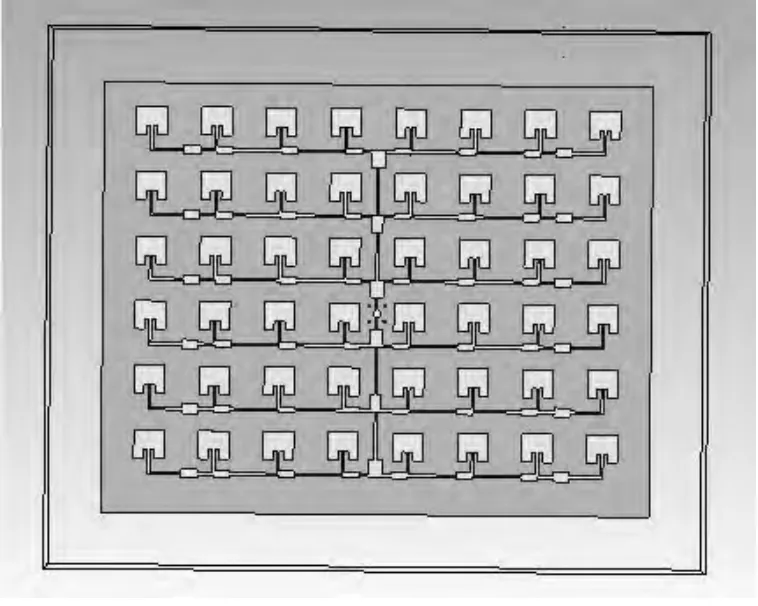
图5 发射天线阵列模型
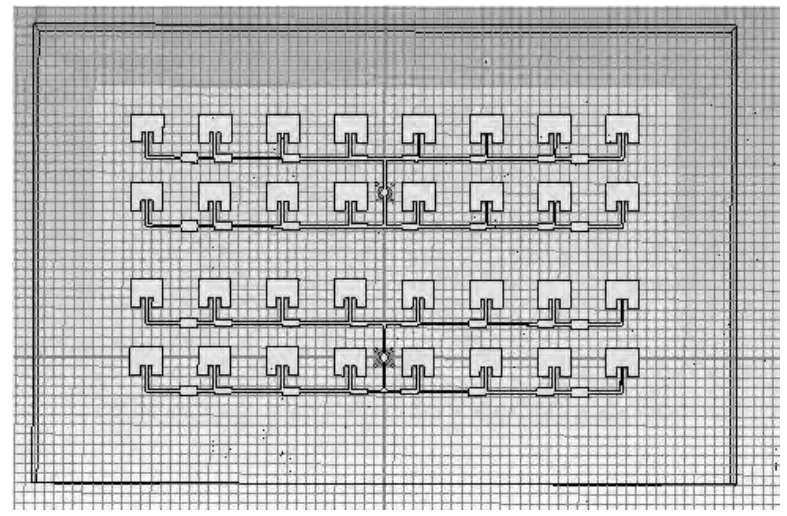
图6 接收天线阵列模型
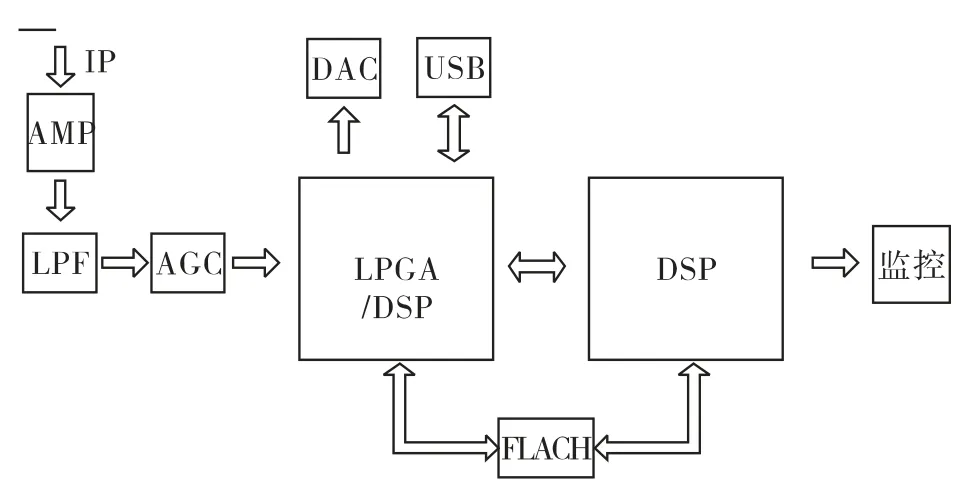
图7 中频处理卡结构
3 测试及结论
在Matlab 中对算法进行仿真,信号处理的流程见图8。数字滤波是为了将噪声去除,同时抵制直流附近成分,只保留测量范围内的回波信号频率。发射机扫频周期较短时,在一次扫频周期内测得的多普勒频偏很小,所以在FFT 计算后得到的是距离信息。再对第一次FFT 计算后同一个距离门的结果进行第二次FFT 就可以得到了多普勒频率[4-5]。
处理后的距离计算结果见图9。
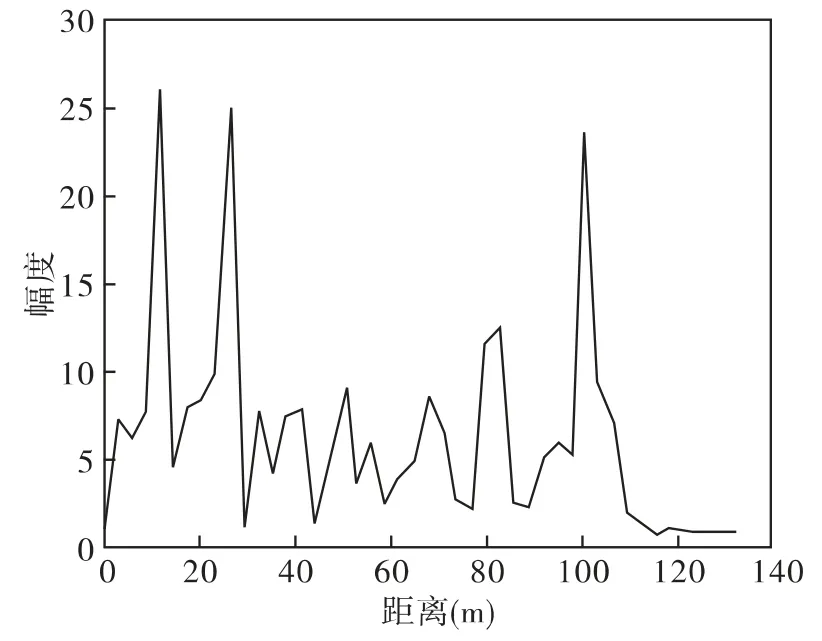
图9 距离计算仿真结果
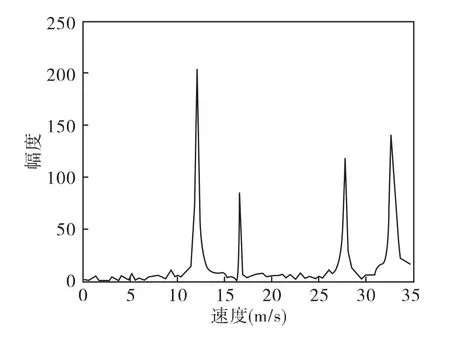
图10 速度计算仿真结果
经过初步测试可知距离测量范围>120m,精度<1m,速度测量精度<2m/s。为了进一步提高测量精度可以采用发射变扫频周期信号,有一种结合FMCW 和FSK 得到的MFSK 信号可以消除多普勒模糊进一步提高性能。为了得到目标的方位、加速度等信息,中频信号处理的算法仍是需要研究的重点。
[1]Rohling,Hermann.Milestones in radar and the success story of automotive radar systems[C].Radar Symposium(IRS),2010 11th International.IEEE,2010.
[2]Yi,Joon Hyung.24 GHz FMCW radar sensor algorithms for car pplications[C].Radar Symposium(IRS),2011 Proceedings International.IEEE,2011.
[3]Kronauge,Matthias,Christoph Schroeder,and Hermann Rohling.Radar target detection and Doppler ambiguity resolution[C].Radar Symposium(IRS),2010 11th International.IEEE,2010.
[4]杜雨洺.近程小扇区LFMCW 雷达信号处理研究[D].成都:电子科技大学,2006.
[5]张容权.双基地LFMCW 雷达信号处理技术研究[D].成都:电子科技大学,2005.
