压电式力传感器连续加载的校准方法
2014-04-13李程
李程
(中航工业北京长城计量测试技术研究所,北京100095)
0 引言
压电式力传感器是利用石英晶体的压电效应将石英晶体受到的力转换成电荷量输出。这类压电式力传感器的共同特征是:当石英晶体受到变化的力时,石英晶体会有相应的电荷量输出;当石英晶体受到不变的力时,石英晶体没有电荷量输出。正是这种特性,压电式力传感器具有抗干扰能力强、温度特性好、动态特性好等优点,从而广泛应用在工程测试和动态测试领域。
压电式力传感器的这种无静态输出的特点,给传统校准带来较大难度。目前国内还没有专门针对压电式力传感器的校准规范和检定规程,对于传感器的基本性能,例如:非线性、重复性、迟滞、灵敏度等,通常采用的校准方法是静态校准方法和脉冲式校准方法[1],必要时采用正弦式校准方法。静态校准方法:要求与压电式力传感器配套的电荷放大器具有良好的电荷保持能力,否则电荷泄漏会导致较大的误差[2];脉冲式校准方法:电荷泄漏造成的误差相对较小,但存在标准力传感器动态特性较差、加载的标准力值误差较大、重复性较差、溯源可靠性相比静态校准方法较差、校准结果的不确定度也较大等缺陷[3]。正弦式校准方法:主要用于校准传感器动态特性,关注传感器的幅频特性和相频特性。国外有一些文献曾经提出连续加载的校准方法,但国内还没有相关的研究报道。本文通过一些实验及分析,对连续加载的校准方法进行一些探索研究。
1 连续加载的校准方法
连续加载的校准方法是利用叠加式力标准机给被校压电式力传感器施加类似三角波的曲线,波峰可达到被校传感器的满量程。利用数据采集系统同时采集标准力传感器和被校力传感器的输出,标准力传感器可采用高精度的应变式力传感器,其基本性能可通过静态校准得到。通过计算机记录整个加载过程。对标准力传感器的输出曲线进行分析,根据标准力传感器灵敏度及连续加载的曲线找到设定的整数力值点,在时间轴上找到相应的时间点,再以此时间点在被校力传感器的连续加载输出曲线上找到被校力传感器的输出电压,这样得到一个力值点的校准数据。依此类推可以在连续加载曲线上找到多个力值点的校准数据。对于不同准确度的被校力传感器可选择不同数量的力值点。在计算被校力传感器的基本性能时可参照相应的力传感器的检定规程。
被校压电式力传感器选用瑞士KISTLER 生产的Z20429 压电式力传感器,该传感器为六分量力传感器。本次试验仅针对其中三分量力进行连续加载校准,三分量力的量程分别是Z 方向0 ~20 kN;X 方向0 ~6 kN;Y 方向0 ~6 kN。传感器连接的电荷放大器型号为5070。该传感器在出厂时的校准数据如表1所示。
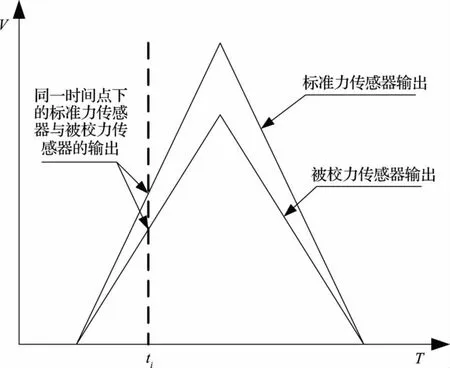
图1 连续加载过程及校准点选取的方法示意图
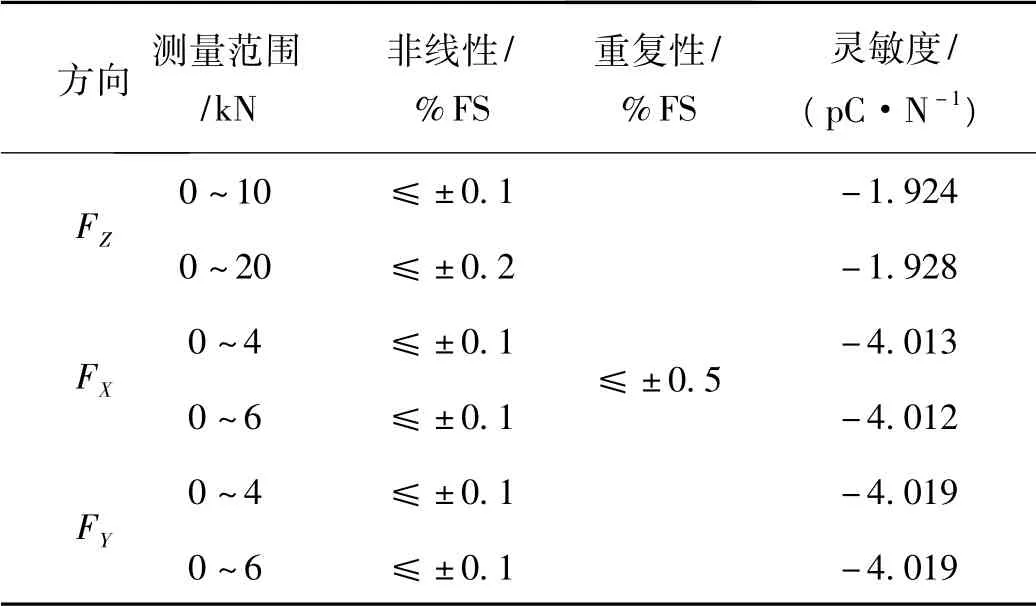
表1 Z20429 压电式力传感器出厂校准数据
2 连续加载校准实验
2.1 实验设备
利用10 t 的叠加式力标准机进行力值加载。标准力传感器选择HBM 公司生产Z4 型应变式力传感器,量程范围为0 ~20 kN,误差小于0.03% FS。放大器采用KYOWA 生产的CDV700 应变放大器,带宽频率是500 kHz。实验前,先将标准力传感器与放大器组成实验系统,进行系统校准,以减小放大器带来的误差。数据采集系统采用美国NI 公司的PXI 采集器,PXI6115 采集模块主要负责采集标准力传感器及被校力传感器的输出曲线,设置采样率10 kbit/s,数据位数12 位。
2.2 实验方法
校准时施加连续载荷周期时间是5 ~20 s,采样频率10 kHz。对采集数据曲线截取一个加载周期的数据长度,根据设置的最大力值点,以正行程加载力值点为依据,在反行程选取对应的相对偏差绝对值最小的力值点,选取时相对偏差应小于0.01%。被校力传感器在整个测量范围内均匀选取11 个校准点,并进行3次循环校准。各校准点的进程、回程示值的算术平均值所连接的曲线分别称为进程校准曲线和回程校准曲线。根据检定规程计算传感器的非线性、重复性等指标。
2.3 实验数据及结果
1)Z 向力值(FZ)
对KISTLER 生产的Z20429 三分量压电式力传感器的Z 方向力进行3 个量程范围的校准,校准结果如表2所示。在0 ~6 kN,0 ~10 kN,0 ~20 kN 范围内的加载曲线及拟合直线分别如图2、图3、图4所示。

表2 Z 方向不同力值范围的校准结果
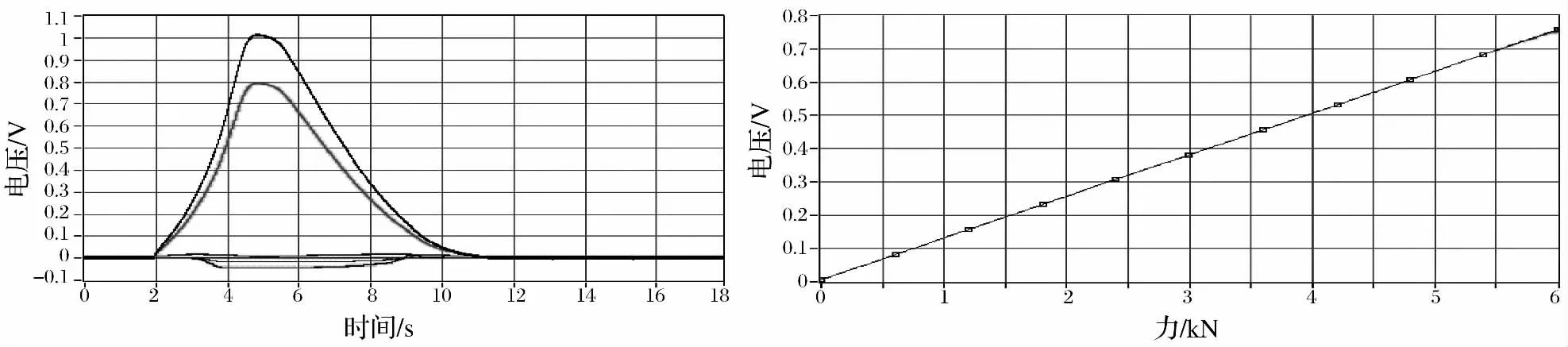
图2 Z 方向加载6 kN 力值的加载曲线及拟合的直线

图3 Z 方向加载10 kN 力值的加载曲线及拟合的直线
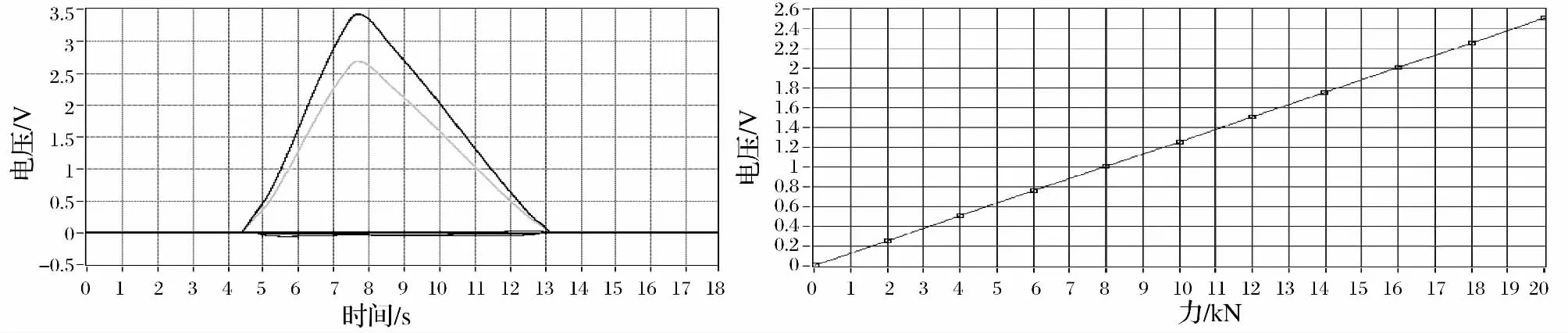
图4 Z 方向加载20 kN 力值的加载曲线及拟合的直线
2)X 向力值(FX)
对Z20429 三分量压电式力传感器的X 方向力进行2 个量程范围的校准,校准结果如表3所示,在0 ~4 kN,0 ~6 kN 范围内的加载曲线及拟合的直线如图5、图6所示。

表3 X 方向不同力值范围的校准结果
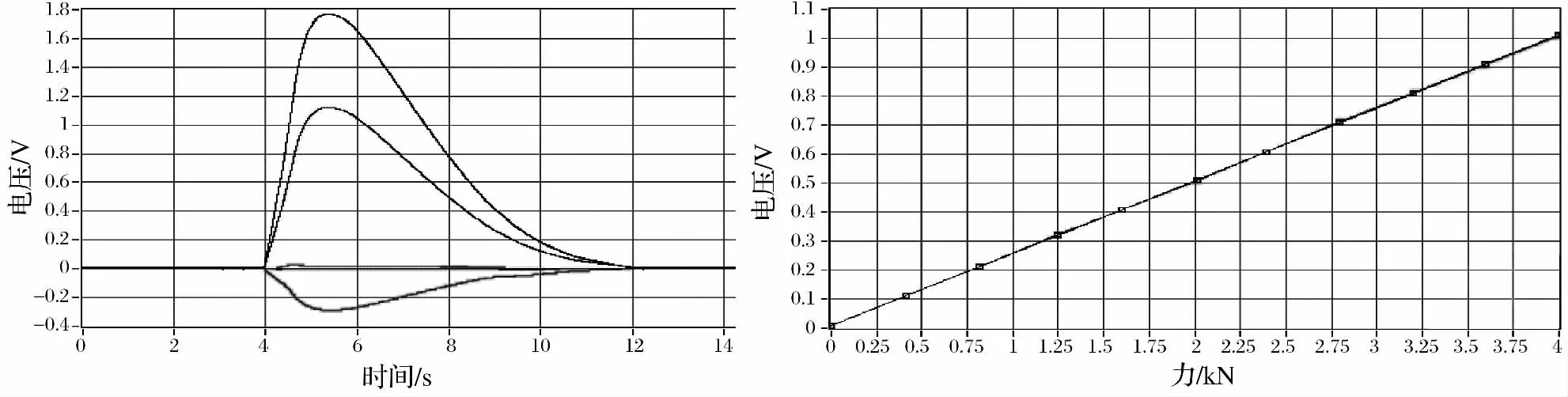
图5 X 方向加载4 kN 力值的加载曲线及拟合的直线
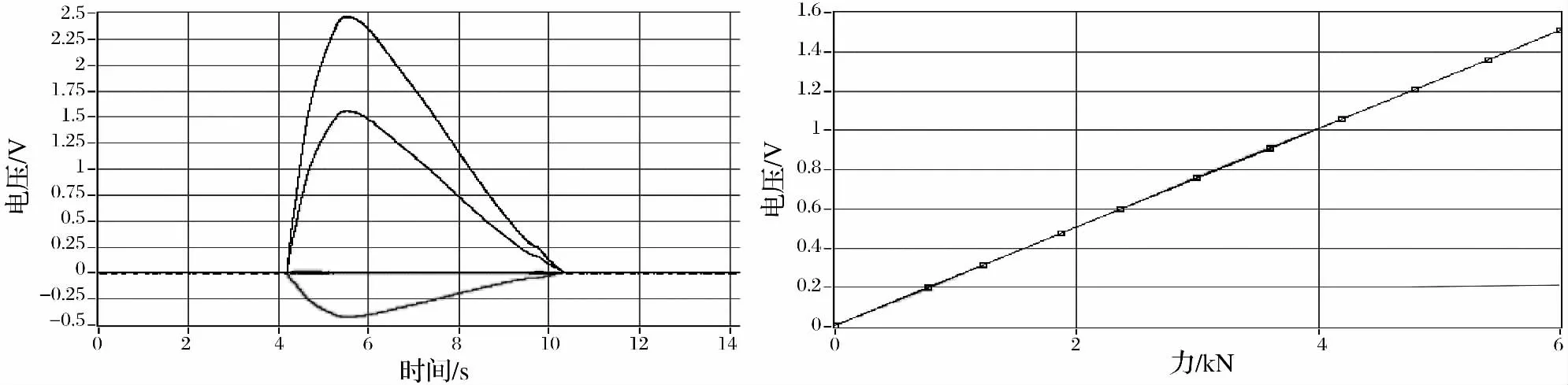
图6 X 方向加载6 kN 力值的加载曲线及拟合的直线
3)Y 向力值(FY)
对Z20429 三分量压电式力传感器的Y 方向力进行2 个量程范围的校准,校准结果如表4所示,在0 ~4 kN,0 ~6 kN 范围内的加载曲线及拟合的直线如图7、图8所示。

表4 Y 方向不同力值范围的校准结果
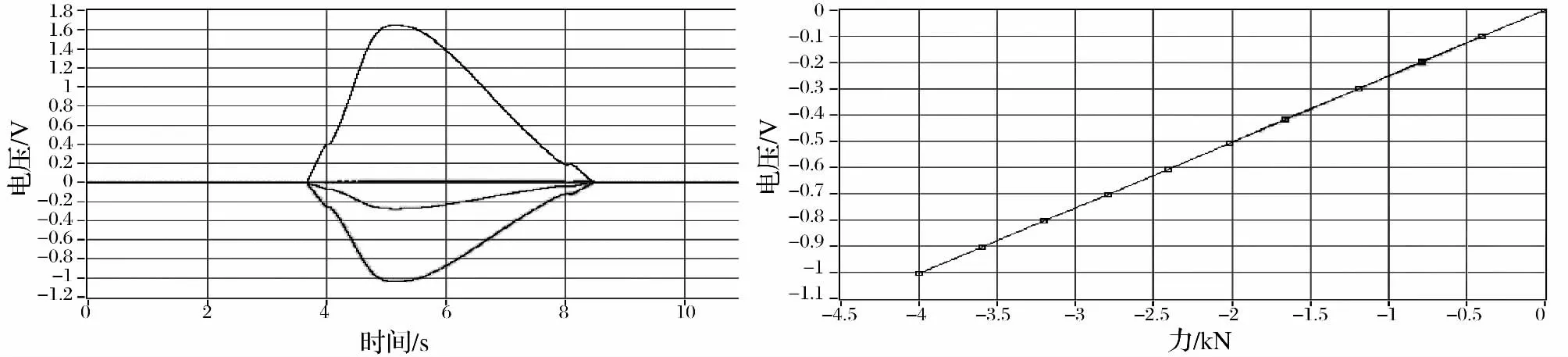
图7 Y 方向4 kN 力值的加载曲线及拟合的直线
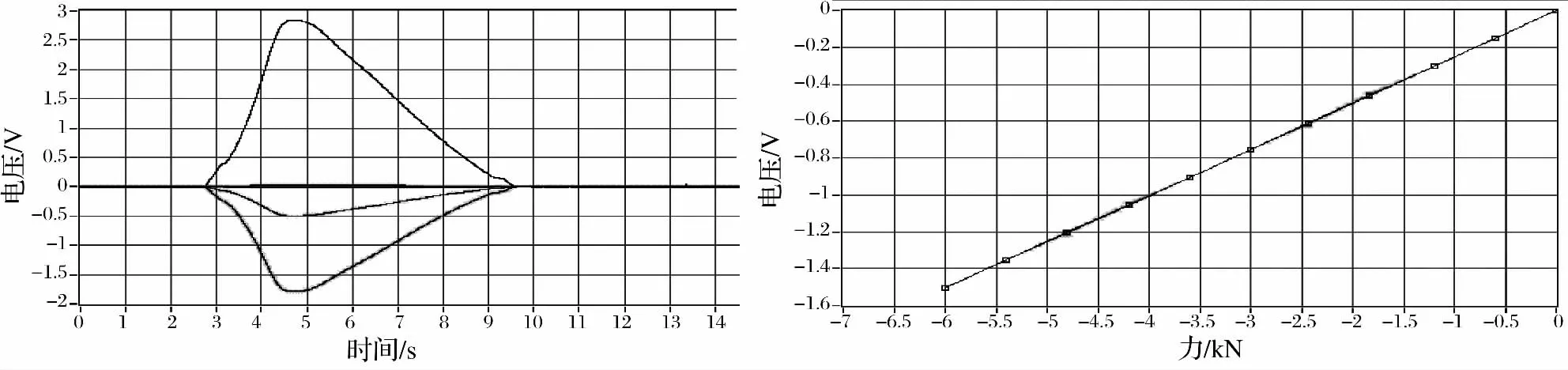
图8 Y 方向6 kN 力值的加载曲线及拟合的直线
连续加载的校准方法得到的数据与传感器出厂时的校准数据吻合得很好,说明连续加载的校准方法是可行的,可以得到比较理想的校准结果。但是这种校准方法有一定的适用条件,用连续加载的方法进行校准时必须考虑一些因素,它们将直接影响到校准结果。
3 分析影响校准结果的因素
3.1 连续加载的时间
压电式传感器最大的特点在于电荷量的输出,传感器自身无法保持电荷,因此电荷的泄漏是静态校准误差中的最大成因。连续加载的时间取决于电荷放大器的电荷泄漏率,应根据电荷泄漏率计算连续加载时间,把泄漏电荷量限制在可控误差范围内。对于低阻抗输出的传感器,传感器内部已经将电荷量转换成电压量,不需要电荷放大器的转换,因此对该类型的传感器进行校准时,连续加载时间要短,否则将产生较大误差。
3.2 标准力传感器的响应时间
标准力传感器的响应时间在连续校准中是非常重要的影响因素之一。在连续加载过程中标准力传感器的响应必须能跟上力值的变化速度,一般来说压电式力传感器的响应较快,但是很多静态准确度很高的力传感器都是应变式传感器,其响应时间较慢,响应迅速的力传感器准确度较差,这是一个非常矛盾的问题。因此在连续加载校准中选择标准力传感器时要充分考虑其响应时间与连续加载时间的匹配。
3.3 数据采集的同步性及准确度、采样率的影响
在连续加载校准时,应保证标准力传感器与被校压电式力传感器在同一时间点上受力的一致性,这就要求两通道数据采集必须同步。(目前市场上销售的多通道并行采集,每通道具有独立A/D 的数据采集系统都能满足要求。)数据采集的准确度主要体现在采集的数据位数,采集数据的准确度是要经过校准的,一般来说数据的位数越高准确度就越高。数据采集系统的采样率直接影响在连续加载校准过程中数据的样本量,只有采集到足够多的数据量,才能找到更加接近校准点的数据,但是过大的采样率会导致存储量及计算量的增大,因此要综合权衡考虑。
4 结束语
由于静态校准与脉冲式校准方法的局限性,同时综合考量高精度标准力传感器的响应时间慢的特性,再兼顾到压电式力传感器电荷泄漏的影响,压电式力传感器的这种连续加载校准方法,具有精度高、实用性强的特点。连续加载的校准方法也可以应用于压电式压力传感器的校准。我们应进一步对这种方法进行深入研究,完善其校准方法和不确定度分析,制定出相应的校准规范或检定规程。
[1]国家质量监督检验检疫总局.JJG391-2009 力传感器[S].北京:中国计量出版社,2009.
[2]刘海斌,元文学,孟昭莉.多分量压电晶体测力平台静态标定与COP 验证研究[J].吉林体育学院学报,2009,25(5):82-84.
[3]李培玉,谭大鹏,刘端阳,等.六分量力传感器及其校准系统[J].中国机械工程,2005,17(16):1523-1526.
