INS/GNSS组合导航系统校准方法
2014-04-13彭军何群孙丰甲郭建麟李娜娜
彭军,何群,孙丰甲,郭建麟,李娜娜
(中航工业北京长城计量测试技术研究所,北京100095)
1 导航方法综述
可靠性和成本因素是推动导航系统发展的重要因素。导航的作用是为运载体提供服务,满足其所提出的特定要求,一般需要考虑其导航精度、覆盖范围、信息更新率、可靠性、完善性、多值性、系统容量和提供的导航信息等参数。目前主要的导航系统有:陆基无线电导航系统,惯性导航系统,天文导航系统,地形辅助导航系统,卫星导航系统,组合导航系统等。
陆基无线电导航是以无线电技术为基础的导航台站建立在地球上的导航系统,具有代表性的有塔康系统、伏尔系统、罗兰-C、测距器、多普勒导航雷达等。其主要优点是整个导航系统的复杂性集中在导航台上,用户设备简单、价格低。但由于依赖于电波在空间的传播,系统的生存能力、抗干扰能力差。
惯性导航是利用加速度计、陀螺等惯性敏感器件在飞机、舰船、火箭等载体上测量其相对于惯性空间的线运动和角运动参数。当给定载体的初始状态,根据牛顿运动定律,即可推算载体的瞬时速度、位置及姿态[1]。惯性导航系统具有独立性、自主性、隐蔽性好及高精度的特点,在军用和民用领域获得了广泛的应用。其固有的缺陷是误差随时间而积累,因此长时间工作将会产生较大的积累误差[2]。
天文导航根据天体来测定飞行器位置和航向,天体的坐标位置和它的运动规律是已知的,测量天体相对于飞行器参考基准面的高度角和方位角就可以推算出飞行器的位置和航向。天文导航系统是自主式系统,不需要地面设备,不受电磁场的干扰,不向外辐射电磁波,隐蔽性好,定位定向精度高,定位误差与时间无关[]。但在低空飞行时因受能见度的限制,较少采用天文导航。
卫星导航系统是以人造卫星为导航台的星基无线电导航系统,能为全球陆、海、空、天的各类军民载体、全天候、24 小时提供高精度的三维位置、速度、和精密时间信息[4]。主要代表是美国的GPS 系统、俄罗斯的GLONASS 系统、我国的“北斗”系统以及欧洲的“伽利略”系统。
两种或两种以上的导航系统组合后称为组合导航系统。每种单一的导航系统都有各自独特的性能和局限性,把几种不同的单一系统组合起来,可构成一种有多余度和准确度更高的多功能导航系统[2]。如:惯性导航系统(INS)和全球导航卫星系统(GNSS)、惯性导航系统和天文导航系统(CNS)、惯性导航系统与雷达组合的系统等都构成组合导航系统。地形辅助导航系统(TAN)也是一种组合导航系统,它是由惯性导航系统与无线电高度表和数字地图构成的组合导航系统。各类组合导航系统有效地利用了系统中各自的优点,进行系统间的取长补短,能有效地减少系统误差,提高精度,同时可降低导航与制导系统的成本。目前以惯性导航系统(INS)和全球导航卫星系统(GNSS)构成的组合导航系统应用最为广泛。
2 INS/GNSS 组合导航的工作原理
以惯性导航系统(INS)和全球导航卫星系统(GNSS)构成的组合导航是目前主要的组合导航方式之一。惯性导航系统可提供十分完整的导航数据,包括载体位置、速度、航向和姿态角参数,具有更新率高、短时精度和稳定性好的优点,但存在定位误差随时间累计和初始对准时间长等缺点。GNSS 是一种星基导航和定位系统,可为陆、海、空、天的用户,全天候、全时间、连续提供三维位置、三维速度及时间信息,但其存在动态响应能力较差、信号易被遮挡、易受干扰等缺点。
将惯性导航系统(INS)和全球导航卫星系统(GNSS)有机地结合起来,可在性能上扬长避短。其结构如图1所示。
根据不同的任务要求采用不同的组合结构和算法,在图2(a)和(b)结构中,GPS 接收机和INS 都是独立的导航系统,GPS 给出位置、速度、时间解(p,v,t),INS 给出位置、速度、姿态解(p,v,θ)。图2(c)结构中,GPS 和INS 是非独立的导航系统,仅作为传感器使用,它们分别测量伪距及伪距率和加速度及角速度。这三种结构分别为非耦合方式、松耦合方式和紧耦合方式[1]。
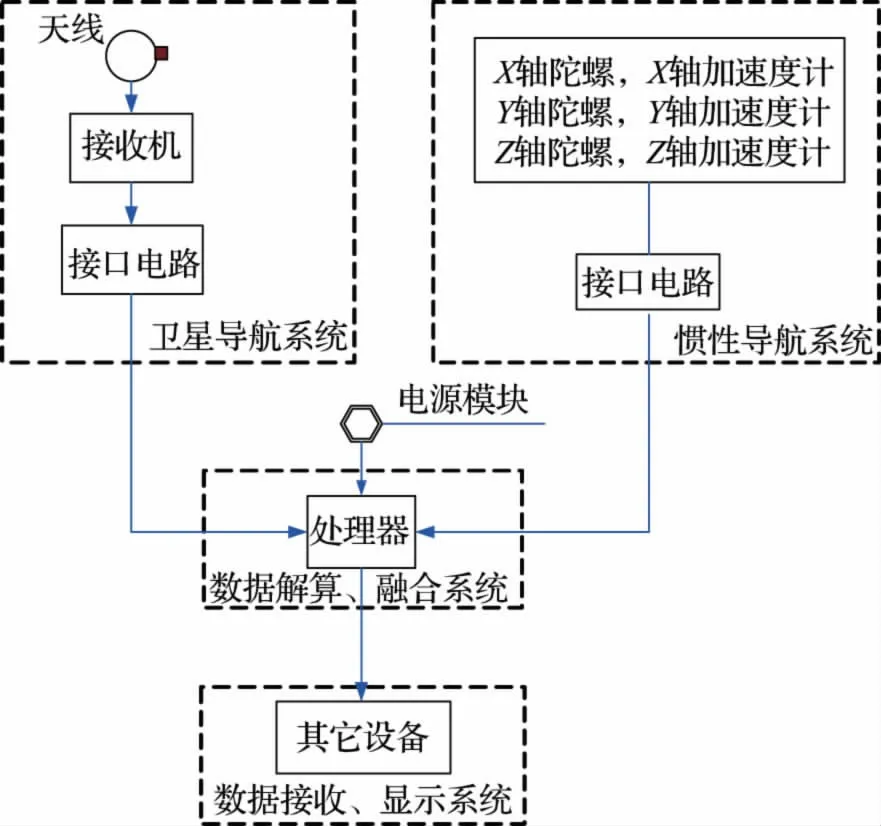
图1 组合导航系统构成图
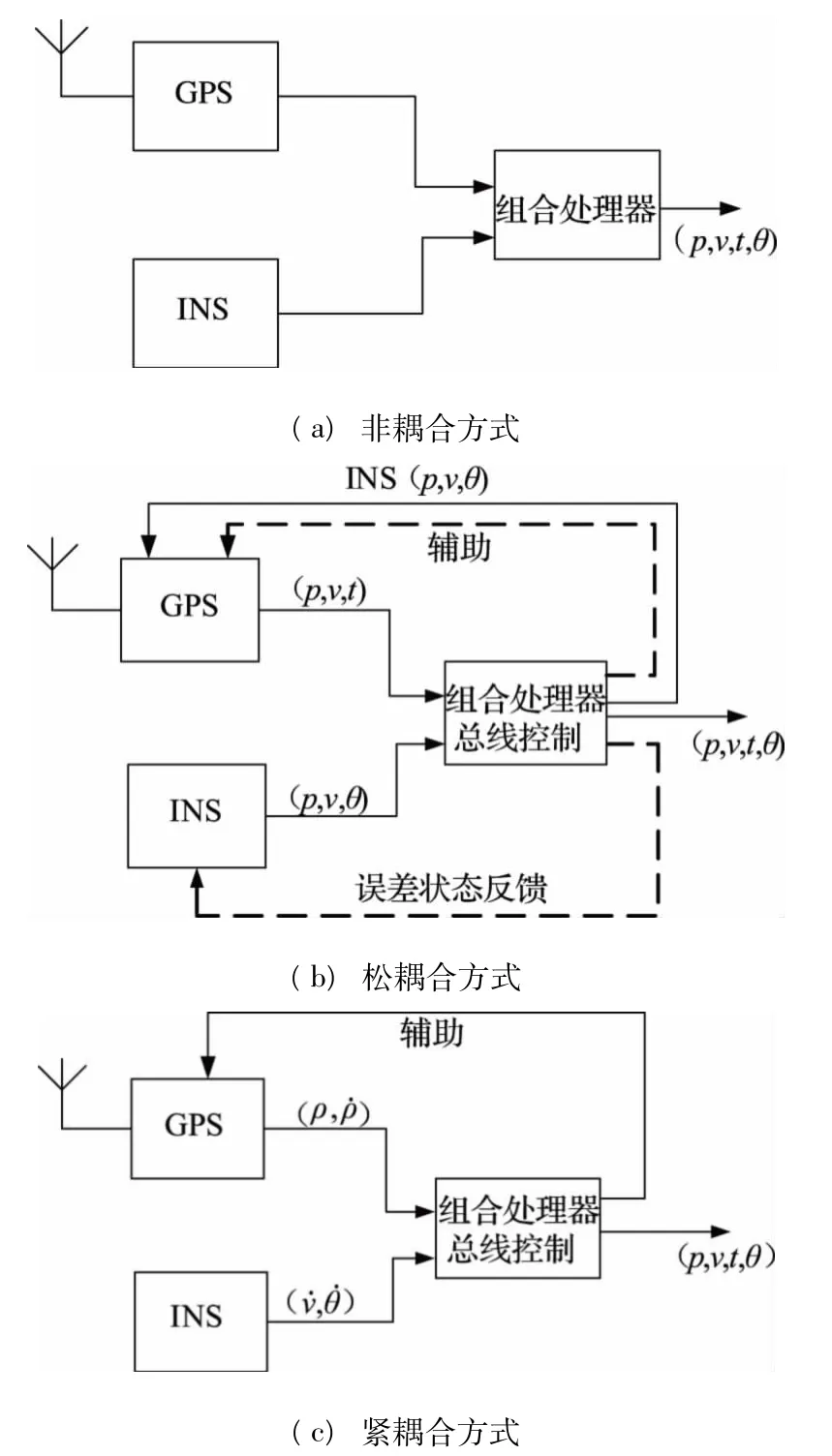
图2 GPS/INS 组合导航组合结构图
INS/GNSS 组合导航系统有两种基本的组合算法:选择算法和滤波算法。采用选择算法时,只要GPS 设备测量值在可接受的准确度范围内,就选取GPS 测量的值作为系统的导航值。当要求的速率高于GPS 设备的输出速率时,可以在两个GPS 数据中间用INS 的数据进行内插。当GPS 信号中断时,从最近一次GPS 测量值开始,采用INS 进行测量,直到GPS 信号恢复为止。这种算法比较简单,它可以有效地消除INS 系统的累积误差,同时在GPS 信号中断时,持续地保持导航能力。滤波算法是根据信号的统计特性,从包含干扰的测量信号中计算出被估计量的统计滤波值。滤波算法大都采用卡尔曼滤波方法,利用上一时刻的估计值以及实时测量值进行实时估计,它是INS/GNSS 组合导航系统经常采用的一种算法。
3 组合导航校准方法
组合导航系统提供的技术指标主要有:定位精度,速度精度,航向精度,姿态精度等。为了考核组合导航系统的算法及组合导航系统的性能指标,国内外目前对INS/GPS 组合导航系统的校准方法主要有以下几种:
3.1 三轴转台实验室仿真校准
利用卫星信号模拟器和三轴转台进行组合导航系统的校准,考核系统的性能指标。将组合导航系统安装在三轴转台上,利用三轴转台的三个轴变化来模拟载体的飞行姿态角;利用卫星模拟器模拟载体运动的位置和速度并模拟产生对应的卫星射频信号,提供给组合导航系统中的卫星接收机,如图3所示。将组合导航系统解算的结果与三轴转台的状态参数及卫星模拟器的状态参数进行比较,得到组合导航系统的位置精度、速度精度和航向、姿态精度。该种方法的优点是测试设备和方法简单、成本低,在组合导航的研制过程中大量地采用了此方法[5-7]。
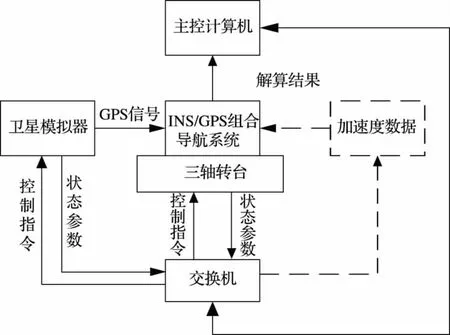
图3 组合导航系统三轴台校准
3.2 旋转臂测试台校准
旋转臂测试台置于外场,组合导航系统置于测试台上,可接收卫星信号。测试台与旋转臂顶端相连,实现不同的方位a、横滚r 和俯仰p 运动,旋转臂可绕水平轴转动,得到不同的仰角e,如图4所示。在该装置的初始位置给出大地坐标(经度、纬度和高度)以及测试台与正北的夹角。利用装置旋转时,方位角、仰角、俯仰角及横滚角的变化,使安装在测试台上的被校INS/GPS 组合导航系统得到不同的姿态、位置和速度数据;利用坐标变换,将这些数据转换成相应平面和方向上的数据,同步锁存这些数据与被校组合导航仪表的输出,并对二者进行分析比较,实现对INS/GPS 组合导航系统进行地面校准的目的[8]。
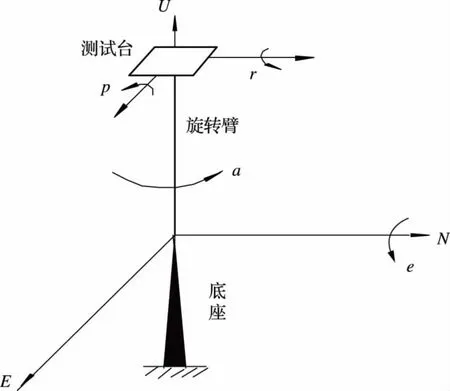
图4 旋转臂测试台校准
该测试方法的优点是通过测量某一具体时刻各轴角位置,很容易对测试台的位置、姿态和速度进行控制与测量。缺点是变换的位置与高程受转动臂长的限制。
3.3 跑车校准
采用在同一跑车上安装两套组合导航系统的方法进行比对校准。以高精度的组合导航系统为参考标准,来对被校组合导航系统进行测试校准[9-11],如图5。也可以采用高精度差分GPS 接收机作为位置和速度标准,将车载惯性平台的输出作为标准姿态角对组合导航进行校准[3];还可将一套组合导航系统安装在跑车的平台上,从一个标准大地点跑到另一个标准点时,位置精度由观察组合导航系统的输出与标准点的位置差得到,此时刻的姿态精度则用组合导航系统的姿态输出值与车载惯性平台的姿态角进行比较得到。
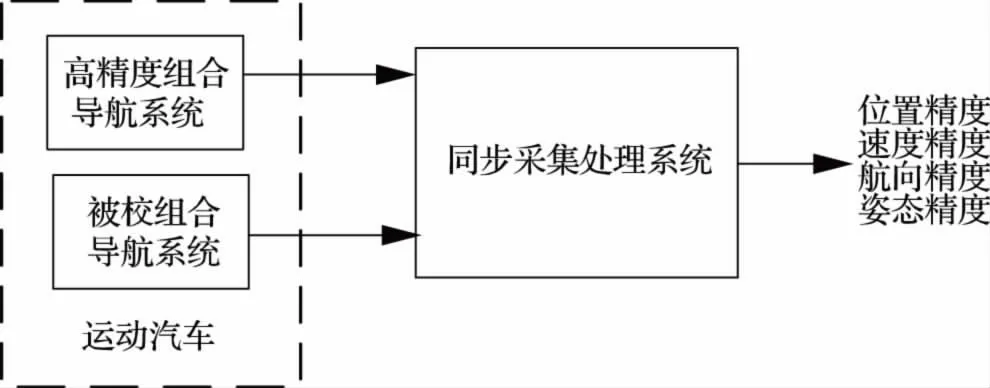
图5 车载试验校准
INS/GPS 组合导航系统跑车校准的优点是在测试过程较为接近实际工作状态,但该校准依赖同类产品的性能状态,受环境等因素影响较大,试验重复性差。
3.4 火箭橇校准
利用已有的火箭橇轨道,对组合导航系统进行校准。美国的火箭橇有多个,尤以位于美国新墨西哥州霍洛曼空军基地(Holloman AFB)的中央惯性制导实验室(简称CIGTF)为代表,它是一个从事制导、导航、辅助导航和空间定位传感器及其系统专业测试、评估、分析的技术中心,是一个中央权威技术机构,只有那些在CIGTF 得到性能验证的制导、导航系统才会成为当前和未来应用的选择对象。在上世纪90年代被定为负责全球定位系统用户设备的主管测试机构,并受命支持空军2000年计划,负责组装和测试空军飞机的全球定位系统(GPS)用户设备[9],已在火箭橇上进行了组合导航系统的相关测试。火箭橇试验系统可以提供高速度、高加速度、大过载,较好地模拟INS/GPS 组合导航系统真实的工作状态。火箭橇试验方法是验证INS/GPS 组合导航系统在复杂环境下的误差模型以及大过载条件下分离系统误差的有效手段[13-14]。
国内仅探索采用火箭橇进行组合导航系统试验,尚未利用其进行INS/GPS 组合导航系统校准技术研究。
火箭橇校准法的优点是可考察高动态情况下INS/GPS 组合导航系统的工作性能,接近载体的飞行状态。但单次试验成本较高,校准过程中缺少高程及姿态变化,测试过程中的溯源性还有待深入研究。
3.5 飞行校准
采用在飞机上同时安装两套INS/GPS 组合导航系统的方法进行比对。用高精度的组合导航系统作为参考标准,来对被校组合导航系统进行测试校准;也可以在飞机上安装高精度航拍相机,以拍摄地面标准场得到的结果为标准,来校准组合导航系统[15]。飞机飞行校准的优点是最接近载体的运行状态,但单次试验成本高,在进行比对校准时依赖同类产品的性能状态;用航拍标准场的方法受天气环境、相机本身的姿态控制精度等因素影响较大。
4 小结
INS/GNSS 组合导航系统的应用极为广泛,对其校准尤为重要。通过对INS/GNSS 组合导航系统的工作原理、目前组合导航一些校准方法的总结分析,可以看出若完成对组合导航系统的校准,校准装置需要具备以下条件:可产生标准的空间位置和速度,可产生标准的姿态角度变化,已知的大地坐标及北向基准,可有效地接收GNSS 卫星信号,统一的时间基准与同步信号。
[1]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007.
[2]张天光,王秀萍,王丽.捷联惯性导航技术[M].2 版.北京:国防工业出版社,2007.
[3]张国良,曾静.组合导航原理与技术[M].西安:西安交通大学出版社,2008.
[4]干国强.导航与定位——现代战争的北斗星[M].北京:国防工业出版社,2001.
[5]孙友,谭云,杨静.GPS 模拟器在GPS/INS 组合导航系统地面仿真试验的应用[J].航天控制,2007,25(1):68-71.
[6]谢华,杜小菁,谢鹏.GPS 模拟器在制导炮弹半实物仿真中的应用研究[C]//2005年飞行力学与飞行试验学术年会论文.[出版地不详]:中国航空学会飞行力学与飞行试验专业委员会,2005:408-412.
[7]徐丹,袁洪,廖炳瑜.一种组合导航终端测试系统的改进设计与仿真[J].计算机仿真,2011,28(8):71-75.
[8]黄庆根.国外惯性器件及GPS 动态测试台最新改进意见[C]//国外惯导测试设备测试技术文集.北京:中国航空精密机械研究所,1995:107-122.
[9]Jose A Rios,Elecia White.Low Cost Solid State GPS/INS Package Crossbow Technology[R].1998.
[10]Lorga J F M,chu Q P,van Rossum W,et,al.Developing and testing a tightly couple GPS/IMU navigation system[C/OL]//59th proceeding of the national technical meeting,2003.[2014- 05- 20].http://www.ipi.uni- hannover.de/fileadmin/institute/pdf/113-casella.pdf.
[11]Brown Alison K,Lu Yan.Navsys Corporation Performance Test Results of an Integrated GPS/MEMS Inertial Navigation Package[C/OL]//59th proceeding of the national technical meeting,2003.[2014- 05- 23].http://www.ipi.unihannover.de/fileadmin/institute/pdf/113-casella.pdf.
[12]张春京,原俊安.中央惯性制导实验室开展精密测试的历程[J].导航与控制译文集,2005(1).
[13]高波,牟建华,王仕成.惯性系统火箭橇试验模拟导弹振动的方法[J].中国惯导技术学报,2009(12):6-7.
[14]胡腾,王跃钢,季邵.基于火箭滑橇试验的加速度计误差模型辨识实验设计[J].弹箭与制导学报,2008,28(4):158-160.
[15]Casella V,Franzini M.Experiences in GPS/IMU calibration rigorous and independent cross-validation of results[C/OL]//59th proceeding of the national technical meeting,2003.[2014- 05- 20].http://www.ipi.uni-hannover.de/fileadmin/institute/pdf/113-casella.pdf.
