基于Elman网络的船舶运动模型辨识
2014-04-08孙洪波施朝健
孙洪波, 施朝健
(1.上海海事大学 商船学院,上海 201306; 2.集美大学 航海学院,福建 厦门 361021)
0 引 言
目前对于船舶操纵运动数学模型的研究基本上从两方面着手:一是机理建模研究,从基本运动方程出发,通过确定其水动力求解其运动参数的水动力模型;二是辨识建模研究,将船舶看作一个动态系统,舵角作为输入,船舶运动参数作为输出,进行水动力参数辨识和函数形式传递的船舶模型辨识.前一种方法需要测量和计算复杂的水动力导数,工作量大,而且某些水动力导数的理论估算目前还不能满足工程精度的要求,只能通过拘束船模试验精确确定,费用高,可行性较低.后一种方法中的水动力参数辨识,存在无法完全辨识的问题,而传递函数形式的船舶模型,更适合于宽阔水域的船舶操纵,不适合具有高强机动性的船舶操纵控制,若要应用于仿真,还需补充目前尚无统一形式的船舶纵向方程[1].近几年,随着神经网络研究的再度兴起,神经网络在模式识别、系统辨识、图像处理和自动控制等众多领域得到广泛应用[2-4],在运动建模与仿真,特别是在船舶操纵性中的应用也越来越受到国内外众多学者[5-8]的关注.神经网络具有自学习、自适应的能力,能够从输入数据中自动学习,抽取包含在数据中的映射关系,因此可以用来学习船舶在航行过程中的动态操纵特性.目前, 在系统辨识中应用最多的是多层前向网络. 该网络具有逼近任意连续非线性函数的能力, 但这种网络结构一般是静态的, 而人们更关心控制系统的动态特性, 这恰恰是反向传播(BackPropagation,BP)神经网络等前馈型网络所缺乏的.与静态前馈型神经网络不同,动态递归网络通过存储内部状态使其具备映射动态特征的功能, 从而使系统具有适应时变特性的能力, 更适合于非线性动态系统的辨识.动态递归神经网络是控制系统建模和辨识中极具发展潜力的网络.[9]本文将动态递归神经网络应用于船舶操纵运动辨识,建立一种基于Elman神经网络的辨识模型.该网络模型与已知的船舶动力学基本模型相对应,使网络结构具有明确的物理意义.随后,利用几种典型的船舶操纵性试验数据对网络模型进行训练和验证,得到比较满意的结果.
1 船舶运动数学模型
船舶的实际运动是一种具有6个自由度的异常复杂的运动.对大多数情况下的船舶运动及控制而言,可以忽略船舶垂荡、横摇和纵摇运动.国际海事组织(International Maritime Organization,IMO)要求的几种典型的船舶操纵性试验极少包含对船舶垂荡、横摇和纵摇运动的数据记录.本文的主要目的在于验证Elman神经网络对船舶运动辨识的可行性.考虑上述原因,仅对船舶3自由度运动进行辨识与建模,不考虑风、浪和流等外界条件的影响.
船舶3自由度的动力学方程[5]为
(1)
船舶3自由度的运动学方程为

(2)
式(1)和(2)中:m为船舶质量;u,v,r,x,y,Ψ,xg分别为船舶纵向速度、横向速度、转艏角速度、纵向位移、横向位移、航向、船舶重心距船中纵向位置;m11和m22为船舶附加质量,I26,I62,I66为船舶附加惯性矩,无量纲化数值见表1;Fx和Fy为作用于船体的合力,其中包括螺旋桨推力和舵力,分别为螺旋桨转数n和舵角δ的函数;Nz为作用于船体的合力矩.式(2)中矩阵为船舶附体坐标转换为大地坐标的转换矩阵.

表1 船舶附加质量和附加惯性矩
将式(1)和(2)联立,得到6个一阶微分方程表示的船舶运动数学模型.为便于计算机动态仿真,将式(1)写成离散时间系统的状态方程为

(3)

2 Elman神经网络辨识模型
2.1 Elman神经网络
Elman神经网络结构见图1.

图1 Elman神经网络结构
在无偏置的情况下对应的方程为
(4)
2.2 网络结构确定
神经网络对系统状态方程的辨识过程见图2.

图2 神经网络串并联辨识模型

f(x)=2/(1+e-2x)-1,x∈(-∞,∞)
(5)
2.3 样本的组织与训练
选取较易获取的几种典型的船舶操纵性试验数据作为网络的训练样本.到目前为止,操纵性试验的类型有18种之多,各行业组织和规则所要求的试验项目也不尽相同.[13]IMO决议A.751所要求的试验项目包括旋回试验、Z形试验和停车惯性试验,试验数据较易获取.因此,本文以一艘载质量为5万t的散货船为例,选用该船的10度Z形试验、20度Z形试验、满舵旋回试验和倒车停船试验数据作为网络的训练和检验样本.船型数据见表2.限于篇幅,本文仅列出该船的10度Z形试验数据,见表3.

表2 载质量为5万t散货船的主尺度
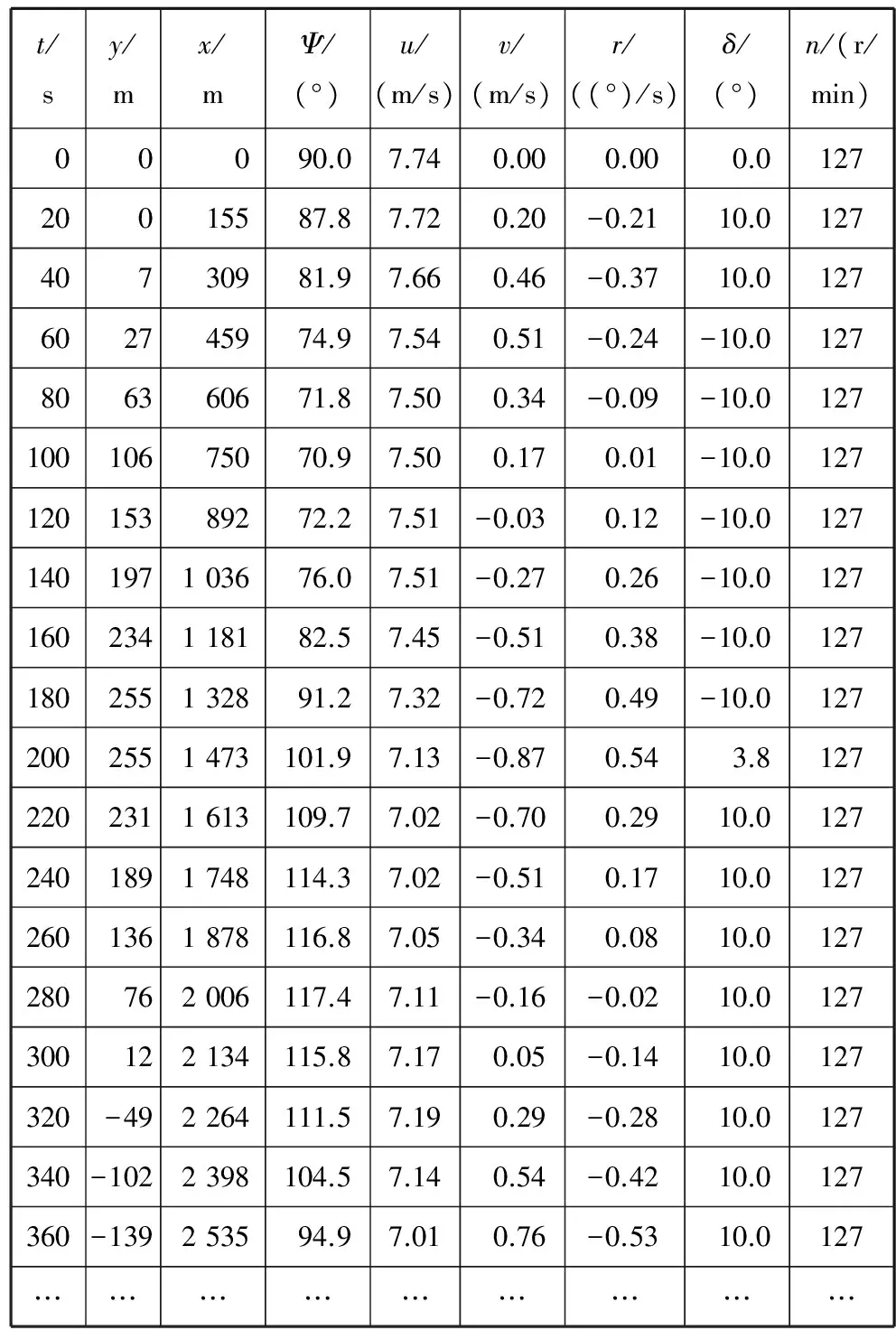
表3 10度Z形试验数据
将表3中的u,v,r,δ,n作为网络训练样本,取值范围分别为[-3.10,7.74],[-1.42,1.42],[-0.92,0.92],[-35.0,35.0]和[-90,127];y,x,Ψ作为检验样本.
首先根据训练样本的取值范围将其归一化到[-1,1]后对网络进行训练,然后分别选取训练样本输入训练好的网络,将网络输出(uvr)代入式(2)计算出(yxΨ),最后将计算结果与检验样本进行比对验证网络模型辨识的可行性和精确性.
3 仿真验证
选用10度Z形试验、20度Z形试验、满舵旋回试验和倒车停船试验数据对网络进行训练并仿真,结果见图4~7.
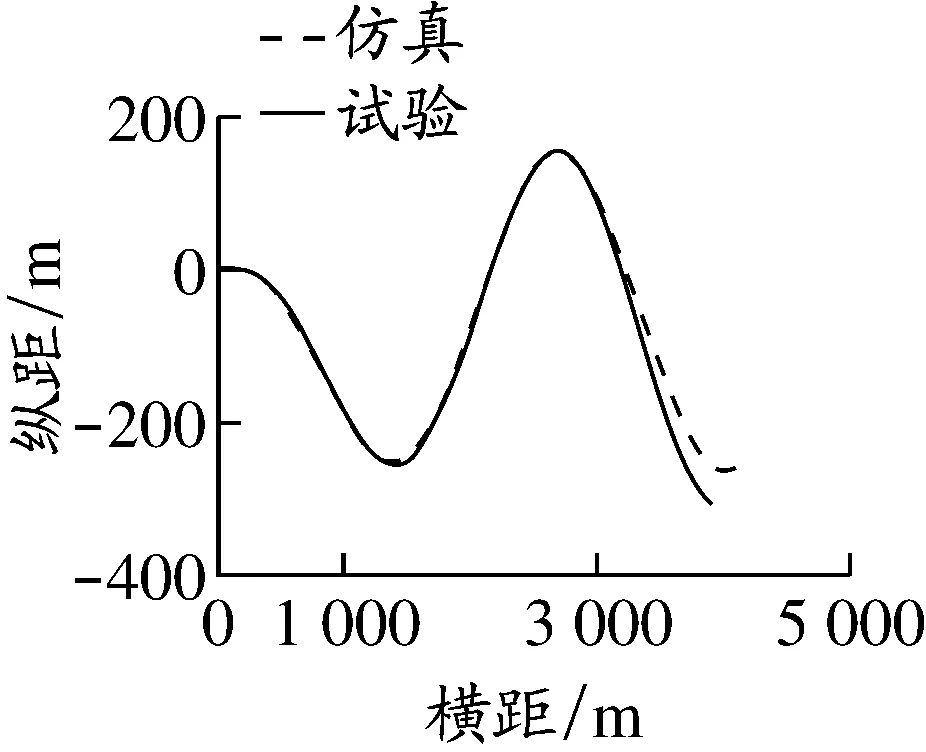
图4 10度Z形试验

图5 20度Z形试验
从仿真结果可以看出,基于Elman神经网络的辨识模型可以反映船舶的操纵性能.此外,虽然神经网络具有较强的逼近能力,但其泛化能力有限[14],利用同一网络不能精确地模拟船舶各种操纵性能,因此仿真结果都存在一定的误差.

图6 右满舵旋回试验
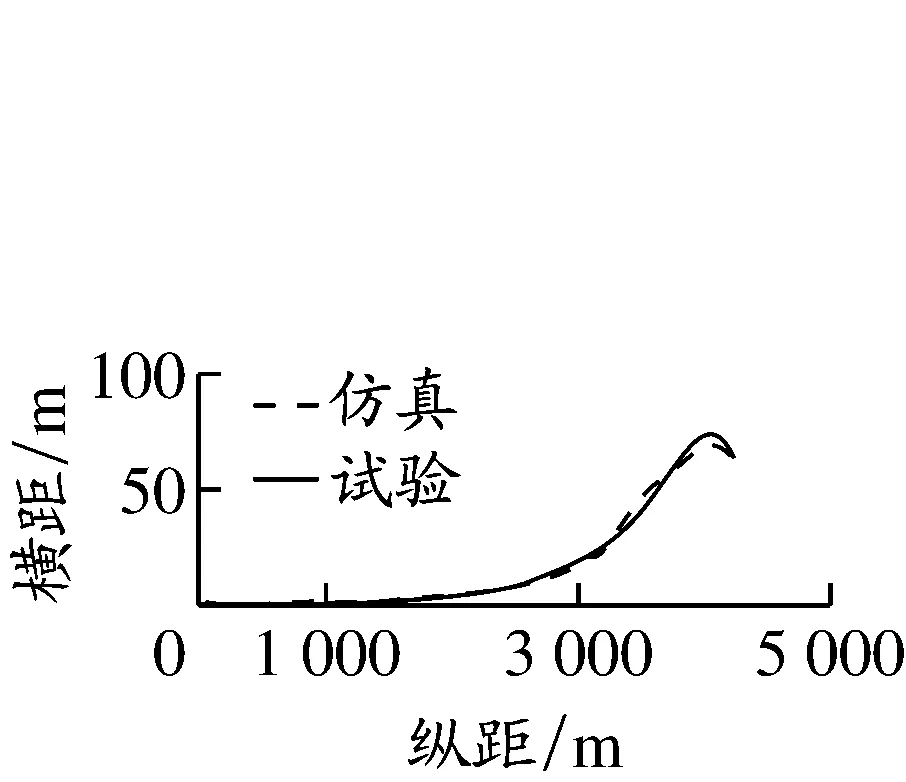
图7 紧急停船试验
4 结束语
在船舶操纵运动建模及控制应用中,存在大量的系统辨识问题,因此开展神经网络在非线性系统辨识及控制领域中的应用研究具有实际意义.本文建立一种基于简化的Elman神经网络的辨识模型,并通过几种典型的涵盖船舶轻度、中度和重度的船舶操纵性试验数据训练该网络,获得反映船舶动力学特性的神经网络模型,并进行仿真验证.仿真结果表明辨识模型基本符合船舶操纵性规律.由于反映船舶各种操纵状态的试验数据,特别是小采样步长的实验数据,较难获取,辨识结果存在一定误差,但就本文所采用的较易获得的船舶操纵性试验样本而言,该方法的辨识结果是可以接受的.
参考文献:
[1]贾欣乐, 杨盐生. 船舶运动数学模型——机理建模与辨识建模[M]. 大连: 大连海事大学出版社, 1999: 234-246.
[2]杨蕊蕊, 朱大奇. 基于生物启发模型的自治水下机器人平面轨迹跟踪控制[J]. 上海海事大学学报, 2011, 32(3): 58-62.
[3]金雪丹, 施朝健. 图像处理与神经网络识别技术在船舶分类中的应用[J]. 上海海事大学学报, 2007, 28(1): 11-16.
[4]翟久刚, 田延飞, 严新平. 基于BP神经网络与残差分析的船舶交通流量预测[J]. 上海海事大学学报, 2013, 34(1): 19-22.
[5]SKJETNE R, SMOGELI Ø N, FOSSEN T I. A nonlinear ship manoeuvering model: identification and adaptive control with experiments for a model ship[J]. Modeling, Identification & Contr, 2004, 25(1): 3-27.
[6]KALINLI A, SAGIROGLU S. Elman neural networks in model predictive control[J]. J Inform Sci & Eng, 2006(22): 1555-1568.
[7]林莉, 万德钧, 李滋刚. 基于人工神经网络的船舶运动数学模型的辨识[J]. 东南大学学报, 2000, 30(2): 71-74.
[8]奚海蛟, 张晓林. 基于Elman网络的共轴式直升机动力学系统辨识[J]. 北京航空航天大学学报, 2008, 34(7): 861-864.
[9]高钦和, 王孙安. 基于Elman神经网络的非线性动态系统辨识[J]. 计算机工程与应用, 2007, 43(31): 87-89.
[10]张德丰. MATLAB神经网络应用设计[M ]. 北京: 机械工业出版社, 2009: 191-198.
[11]王宏伟, 杨先一, 金文标.基于Elman 网络的时延预测及其改进[J]. 计算机工程与应用, 2008, 44(6): 136-138.
[12]DEMUTH H, BEALE M. Neural network toolbox user’s guide[M]. US: The MathWorks, Inc, 2000: 12-15.
[13]洪碧光. 船舶操纵原理与技术[M]. 大连: 大连海事大学出版社, 2007: 130.
[14]赵远东,胡为尧. 人工神经网络泛化性能改进[J]. 南京信息工程大学学报, 2011, 3(2): 164-167.