基于转速控制的机车防空转滑行控制方法
2014-04-05蔡志伟
蔡志伟,高 磊
(中国北车大连机车车辆有限公司 技术开发部,辽宁大连116022)
专题研究
基于转速控制的机车防空转滑行控制方法
蔡志伟,高 磊
(中国北车大连机车车辆有限公司 技术开发部,辽宁大连116022)
介绍了目前主要的机车防空转滑行控制方法,提出了一种基于转速控制的机车防空转滑行控制方法。试验结果表明,上述方法能有效的防止发生牵引空转和制动滑行,最大限度的利用黏着力,可实现机车全天候的防空转滑行控制。
转速控制;防空转滑行控制;牵引;制动;黏着力
轮对产生的轮周牵引力或制动力大于轮轨间的黏着力时车轮就会发生空转或打滑,轮轨间的黏着力受轮轨表面状况、线路状况、机车轴重分配等因素的影响,并且与司机操纵方式及机车运行速度有关。空转或打滑会使轮轨发热、轮轨擦伤,严重时还会影响机车的安全运行,危害极大。轮轨之间的黏着是一个具有不确定性的复杂时变系统,最大化地利用轮轨黏着力,并且有效防止牵引空转和制动滑行,已经成为世界铁路机车车辆黏着控制技术领域发展的方向。
1 现有技术及其缺点
1.1 差动继电器法
目前国产直流传动机车大多采用差动继电器法,在机车主电路中配装有差动继电器,每个差动继电器与两台牵引电机相连,机车正常运行时,两台牵引电机相连的差动继电器两端的电压是平衡的。当有一个车轮发生空转时,该车轮的牵引电机与另一个车轮的牵引电机之间的电位差就会发生变化,使差动继电器得电,使串联在该差动继电器常开触点电路中的声光报警器接通,发出空转报警。司机发现空转报警后,手动撒沙、降功率。利用电压差并不能准确判断发生空转的严重程度,当司机看到空转指示灯亮之后再脚踏撒沙,同时通过手动操作削减机车牵引功率来制止空转。这个操作过程时间比较长,而且很难把握合适的功率削减值。
1.2 判据法
检测机车各个牵引电机转速和电流,通过计算转速差、车轮加(减)速度、加(减)速度微分信号、滑移率及电流差、电流变化率等参数,并且设定这些参数的限定值,当超过或低于这些限制值时,即判断为空转或滑行,并立即实施撒沙及减牵引力(制动力)。采用这样的方法,不能实时获得合适的减载率百分比、减载持续时间、撒沙执行时间。通过采用多个反馈及计算参数联合控制,同时观测多个参数,对黏着利用状况进行综合评估,然后综合判断空转及滑行,空转及滑行时刻判断的准确度虽然有所提高,但是减载率百分比,减载持续多长时间仍难把握,很难给出一个定量的合理控制值,难以实现既充分利用黏着,又有效防止空转滑行的控制效果。
1.3 模糊控制法
模糊控制系统通常由输入输出接口、模糊控制器、执行机构、传感器和被控对象5个部分构成,其中模糊控制器是模糊控制系统的核心。模糊控制法必须编制大量的程序来进行仿真分析,或者等到控制器设计完成后通过试验来分析验证。整个过程繁琐并且工作量较大。
2 基于转速控制的机车防空转滑行控制方法
2.1 系统结构及控制原理
基于转速控制的机车防空转滑行控制方法的控制框图如图1所示,根据机车运行状态生成牵引力(制动力)给定值VTref,检测牵引力(制动力)反馈值VTfdb,送入牵引力(制动力)PID闭环控制器VT,得出牵引力(制动力)控制值VTout;计算速度差给定值VDref,计算速度差反馈值VDfdb,将VDref及VDfdb送入速度差PID闭环控制器VD,得出转速差控制值VDout;根据机车运行状态生成最大加速度给定值VAref,计算最大加速度反馈值VAfdb,将VAref及VAfdb送入加速度PID闭环控制器VA,得出加速度控制值Aout;比较牵引力(制动力)控制值VTout、转速差控制值VDout、加速度控制值VAout,取三者中的最小值控制机车牵引力(制动力)。
采用该控制方法,通过转速差PID闭环控制器和加速度PID闭环控制器的作用,可以使各牵引电机转速差和加速度限制在合理的范围内。由于PID调节器的作用使得系统在偏差较大时具有快速调节特性,在偏差较小时具有连续的稳定调节特性,在偏差信号快速变化时具有超前调节特性,能够最大限度的利用黏着力,可实现机车全天候的防空转滑行控制。
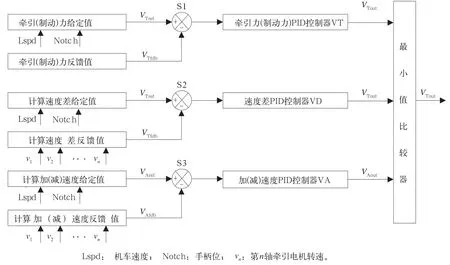
图1 基于转速控制的机车防空转滑行控制方法框图
2.2 基于转速控制的机车防空转滑行系统硬件组成及基本原理
基于转速控制的机车防空转滑行系统硬件组成由微机控制系统、各牵引电机转速传感器、电压传感器、电流传感器等。下面以出口新西兰CKD9B机车为例,对基于转速控制的机车防空转滑行系统的基本原理进行简要说明。
CKD9B交直流电传动内燃机车牵引主电路如图2所示,通过微机控制主发电机励磁机的励磁电流,实现对主发电机整流后直流电压的控制。Rlt为励磁电阻,D1为续流二极管,Q1为场效应管,EXC为励磁发电机,ERC为励磁整流器,MG为主发电机,MRC为主整流器,M1~M6为牵引电机,SD1~SD6为牵引电机转速传感器。机车微机控制器输出的PWM信号通过控制Q1的导通占空比,控制流过EXC励磁线圈的励磁电流,EXC发出的三相交流电通过ERC整流后,为主发电机励磁绕组供电,主发电机发出的三相交流电经MRC主整流柜整流后向M1~M6供电。通过调节PWM信号的脉冲宽度值即可调整牵引电机的直流端电压,进而调整牵引电机牵引力。

图2 CKD9B交直流电传动内燃机车牵引主电路
CKD9B交直流电传动内燃机车电阻制动主电路如图3所示,牵引电机M1~M6分别以Rz为负载以发电机方式运行。SD1~SD6为牵引电机转速传感器。主发电机发出的三相交流电经MRC主整流柜整流后向牵引电机M1~M6串联的励磁绕组供电。通过调节PWM信号的脉冲宽度值即可调整流过6个牵引电机励磁绕组的励磁电流,实现牵引电机制动电流的调整,进而实现制动力的调整。
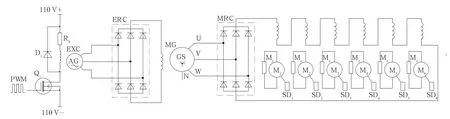
图3 CKD9B交直流电传动内燃机车电阻制动主电路
通过检测司机控制器手柄位状况、机车速度、牵引电流(主发电机输出电流)分别计算出牵引力(或制动力)给定值VTref、速度差给定值VDref、最大加速度给定值VAref,然后根据牵引电机电压及电流反馈计算牵引力(或制动力)反馈值VTfdb,根据第1~6轴牵引电机转速反馈分别计算速度差反馈值VDfdb、最大加速度反馈值VAfdb。将VTref及VTfdb送入PID闭环控制器VT,得出牵引力(或制动力)控制值VTout,将VDref及VDfdb送入速度差PID闭环控制器VD,得出转速差控制值VDout;将VAref及VAfdb送入加速度PID闭环控制器VA,得出加速度控制值VAout;比较VTout、VDout和VAout,取三者中的最小值控制机车PWM信号通过控制Q1的导通占空比,进而控制机车牵引力(或制动力)。
2.3 软件设计
基于转速控制的机车防空转滑行控制主程序流程图参见图4,应用定时器1中断产生10 ms定时中断。中断子程序首先在框1.1关闭定时器1中断,在框1.2清除定时器1中断标志。然后进入框1.3,判断牵引指令是否为真:如果是,则进入框1.4,执行牵引力控制子程序,否则进入框1.5。在框1.5,判断制动指令是否为真:如果是,则进入框1.6执行制动力控制子程序;否则进入框1.7。在框1.7,打开定时器1中断,为下一次定时器1中断作好准备。然后中断子程序运行结束。
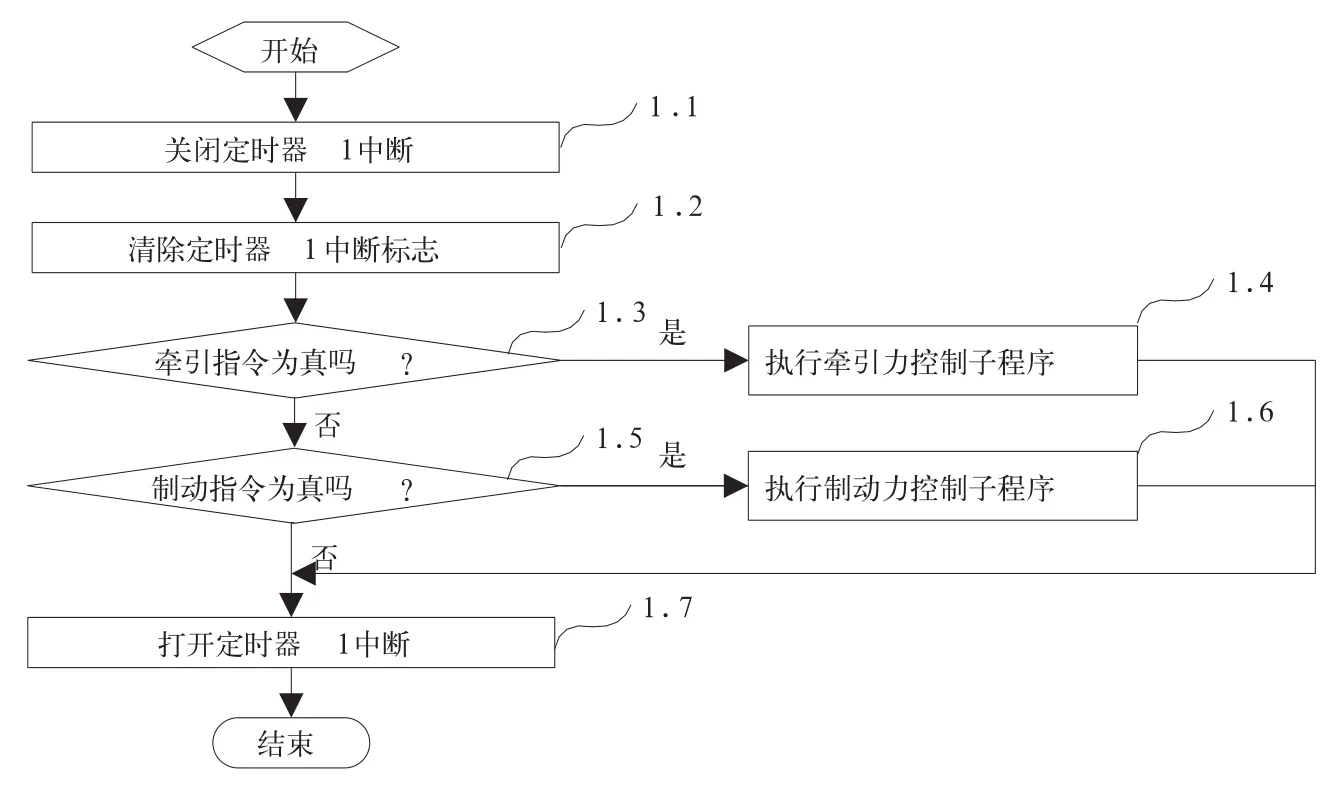
图4 基于转速控制的机车防空转滑行控制主程序流程图
牵引力控制子程序和制动力控制子程序流程图如图5、图6所示,两者程序流程非常相近,基本程序流程如下:根据机车运行状态生成牵引力(制动力)给定值VTref,检测牵引力(制动力)反馈值VTfdb,送入牵引力(制动力)PID闭环控制器VT,得出牵引力(制动力)控制值VTout,且限制VTmin≤VTout≤VTmax;检测各轴的转速值,计算平均轮周线速度Vavr、最大轮周线速度Vmax及最小轮周线速度Vmin,计算机车速度Lspd=Vavr,检测机车牵引力(制动力)反馈值,计算速度差给定值VDref和最大加速度给定值VAref;计算速度差反馈值:VDfdb=Vmax-Vavr(牵引模式)或VDfdb=Vavr-Vmin(制动模式),计算各轴转速加速度值VAfdb1~VAfdbn(牵引模式)或各轴转速减速度值VAfdb1~VAfdbn(制动模式),计算加速度反馈值VAfdb等于各轴转速加速度值VAfdb1~VAfdbn中的最大值(牵引模式)或减速度反馈值VAfdb等于各轴转速减速度值VAfdb1~VAfdbn中的最大值(制动模式);将VDref及VDfdb送入速度差PID闭环控制器VD,得出转速差控制值VDout,且限制Vmin≤VDout≤Vmax;将VAref及VAfdb送入加速度PID闭环控制器VA,得出加速度控制值VAout,且限制Vmin≤VAout≤Vmax;按转速差控制值VDout、加速度控制值VAout、牵引力(制动力)控制值VTout三者中的最小值控制机车牵引力(制动力)。

图5 牵引力控制子程序流程图
3 基于转速控制的防空转滑行控制方法在新西兰机车上的应用
基于转速控制的机车防空转滑行控制方法已经成功应用于CKD9B型出口新西兰机车,解决了在机车应用过程中出现的牵引空转和电阻制动滑行问题,可以有效保护轨道及机车轮缘,降低司机的劳动强度,提升机车的牵引和制动性能,使得机车的应用更加安全可靠。
图7为CKD9B型机车防空转性能试验波形,图形上部分为励磁脉宽、主发电机电流、柴油机转速曲线,下部分为第1、3、5轴牵引电机转速曲线及撒沙指令曲线。试验线路为新西兰汉密尔顿至米申布什钢厂,负载为1 300 t,坡道22‰,天气状况为中雨,轨面湿滑。机车以42 km/h(对应牵引电机转速为1 260 r/min)的初始速度爬坡,在机车速度降低的同时,主发电机电流不断增加,机车速度降到23 km/h(对应牵引电机转速为690 r/min),主发电流达到4 200 A,机车速度开始逐渐恢复。在此过程中,微机控制系统根据牵引电机转速反馈计算牵引电机转速差反馈值和最大加速度反馈值。一方面这两个反馈值分别与电机转速差撒沙阈值和最大加速度撒沙阈值对比,当其中任意反馈值大于其相应撒沙阈值时,微机输出撒沙指令;另一方面,这两个反馈值分别与电机转速差给定值和最大加速度给定值比较,通过相应PI调节器调节,微调或快速调节主发电机电流,既能有效抑制牵引电机空转,又能最大限度的利用黏着牵引力。

图6 制动力控制子程序流程图
图8为CKD9B型机车防滑行性能试验波形,图形上部分为励磁脉宽柴油机转速、第1、3、5轴牵引电机电流曲线,下部分为第1、3、5轴牵引电机转速曲线和撒沙指令曲线。试验线路为新西兰汉密尔顿至奥克兰,负载为1 000 t,天气状况为小雨,轨面湿滑。机车以58 km/h(对应牵引电机转速为1 740 r/min)的初始速度进行电阻制动,机车速度不断下降,当制动电流达到580 A时,从牵引电机转速曲线可以看出,机车速度降到23 km/h(对应牵引电机转速为690 r/min),主发电机电流达到4 200 A,个别牵引电机发生了滑行,微机控制系统根据牵引电机转速反馈计算牵引电机转速差反馈值和最大减速度反馈值。一方面这两个反馈值分别与电机转速差撒沙阈值和最大减速度撒沙阈值对比,当其中任意反馈值大于其相应撒沙阈值时,微机输出撒沙指令;另一方面,这两个反馈值分别与电机转速差给定值和最大减速度给定值比较,通过相应PI调节器调节,微调或快速调节主发电机励磁脉宽,进而调节制动电流(牵引电机电流),既能有效抑制牵引电机滑行,又能最大限度的利用黏着制动力。
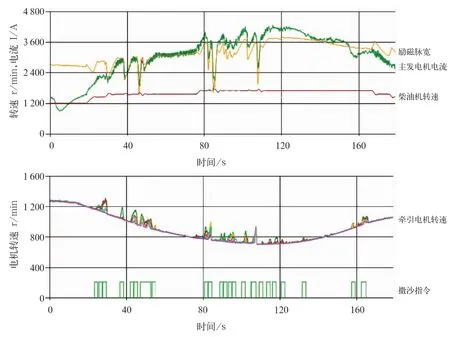
图7 CKD9B型机车防空转性能试验波形
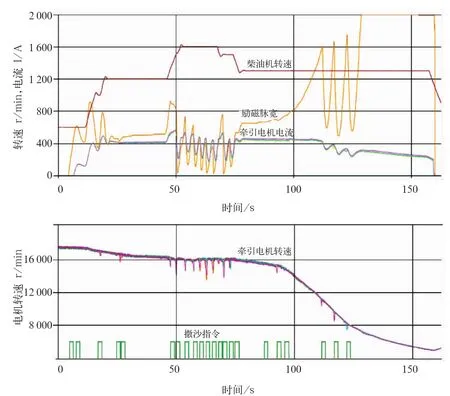
图8 CKD9B型机车防滑行性能试验波形
4 结束语
目前基于转速控制的机车防空转滑行控制系统已成功地应用于大连机车车辆有限公司研制的出口新西兰、阿根廷等多种机车中。应用表明,该控制系统既能满足机车正常工况下的稳定运行,又能满足黏着控制过程中的快速响应,在保证不发生空转(滑行)的情况下,实现牵引力(制动力)的最大化,具有较高的实际推广价值。
[1] EN 15595:RAILWAY APPLICATIONS-BRAKING-WH EEL SLIDE PROTECTION[S].
[2] UIC 541-05-2005:Brakes-Specifications for the construction of various brake parts-Wheel Slide Protection device(WSP)[S].
[3] 李江红,马 健,彭辉水.机车黏着控制的基本原理和方法[J].机车电传动,2002,(6):4-8.
[4] 赵红卫.机车黏着自适应控制系统的研究[J].中国铁道科学,1998,9(4):33-40.
[5] 颜光耀.机车全自动化空转控制装置的研究[J].内燃机车,2009,(4):11-14.
[6] 王 辉,肖 建.机车模糊黏着控制及其仿真研究[J].机车电传动,2002,(3):19-23,43.
Locomotive Anti-slip Method Based on the Speed Control
CAI Zhiwei,GAO Lei
(Technology Development Department,CNR Dalian Locomotive and Rolling Stock Co.,Ltd.,Dalian 116022 Liaoning,China)
The present locomotive anti-slip control methods are briefly introduced,and an anti-slip control method based on the speed control is proposed.Test results show that this method based on the speed control can effectively prevent the occurrence of traction idling and brake sliding,can get maximum usage of adhesion,and can realize the all-weather anti-slip control for locomotives.
speed control;anti-slip control;traction;brake;adhesion
U260.37
A
10.3969/j.issn.1008-7842.2014.01.05
1008-7842(2014)01-0028-06
5—)男,高级工程师(
2013-08-16)
