智能控制在电梯乘坐舒适性方面的研究和应用
2014-04-03王永科张银娟
王永科,张银娟*
(1.许昌电气职业学院,河南许昌 461000;2.许昌学院电气工程学院,河南许昌 461000)
0 引言
目前,我国已进入城镇化快速发展阶段,高层建筑纷纷拔地而起,电梯已成为千家万户日常使用频率较高的工具,特别是高层建筑电梯,其运行安全可靠和舒适性成为大众日益关系的话题,电梯乘坐舒适性已经是电梯生产商和销售商的一大卖点,甚至已经影响到人身安全[1-4]。因此,从面向系统优化的先进控制算法出发,将智能控制引入电梯乘坐舒适性方面,利用神经网络自校正学习能力强的特性,对电梯驱动系统这样复杂的过程和系统参数进行有效控制,实现不降低电梯乘坐舒适性的同时,保证电梯最大限度地运行在稳定状态,具有重要的工程和经济意义。
1 单神经元自适应PID控制
单神经元PID控制结构简单且计算方便,突破传统的PID控制依靠精确模型和不易在线参数调整,实现在线调节系统指标参数,达到对时变性、非线性、强耦合的电梯曳引系统的过程和参数进行有效控制。
单神经元自适应 PID控制结构如图1所示,r(k)和y(k)为系统输入和输出,加权系数的调整采用有监督Hebb学习规则,对PID控制的比例、积分和微分环节分别采用不同的学习速度ηP、ηI和ηD,通过对加权系数的在线调整,表现出自适应和自学习强的特点,实现PID控制的收敛性和鲁棒性效果[5-6]。单神经元自适应PID控制算法如式(1):
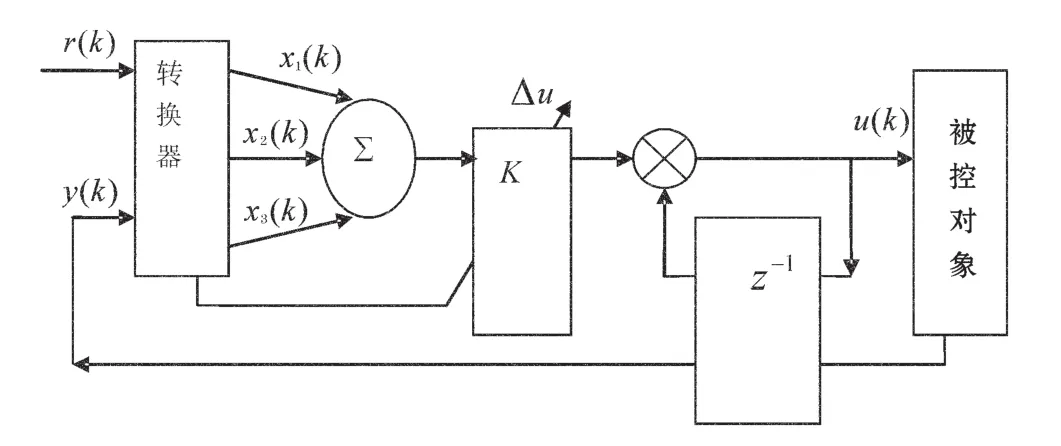
图1 单神经元自适应PID控制结构

ηP、ηI、ηD——比例、积分、微分的学习速率;K为神经元比例系数,K>0,对于电梯曳引系统这样复杂的系统,如果要保证系统的稳定性,K值不能太大。
2 电梯曳引控制系统研究
电梯乘坐舒适性的基本目标是改善电梯启动和制动的速度及加速度,提高电梯运动的稳定性,采用优化控制算法,引入先进的控制策略,以期通过对电梯曳引驱动系统参数和过程系统优化,实现电梯曳引驱动系统输出有较强的抗干扰和稳定性,达到理想的轿厢运行抛物线—直线相结合的速度曲线,保证电梯最大限度地运行在稳定的状态。
试验分别采用单神经元自适应PID控制算法和普通PID控制算法对电梯曳引驱动进行在线控制,以期通过对比分析,表征对电梯曳引驱动控制算法的优化。采用正常运行速度为2.5m/s的4层SX-701型电梯模型,设定采样周期为0.01s,K=0.05,ηP=100,ηI=200,ηD=20,初始加权的系数为ω1(0)=0.9,ω2(0)=0.8,ω3(0)=0.7,仿真结果如图2所示。
从图2可以看出,在电梯启动和制动阶段,由于曳引电机低转速运行,传统的PID控制系统速度输出爬行的现象比较严重,单神经元自适应PID控制得到系统输出速度曲线平滑,爬行现象得到显著改善,表现出较好的自校正和抗干扰的能力;当电梯匀速运行时,单神经元自适应PID控制得到系统输出速度较为稳定,波动较小,保持了较好的稳定精度。单神经元自适应PID控制比普通PID控制在速度响应、匀速和速度平滑性方面有较强的优势,电梯曳引驱动系统速度输出较好跟踪抛物线—直线相结合的速度曲线。

图2 系统输出速度曲线
3 总结与展望
单神经元自适应PID控制算法以其结构简单、计算简便和自学习适应能力强的特点广泛应用于实际生产生活。单神经元自适应PID控制对电梯曳引驱动系统在线实现自整定系数调整,得到较理想的控制参数,使得系统输出参数较好地趋近理想,在电梯加速、匀速和制动阶段具有较好的自适应和抗干扰能力,较好地改善电梯曳引驱动系统的输出品质,提高轿厢乘坐的舒适性。

[1]黄春蓉.关于电梯能耗评价的探讨[J].黑龙江科技信息,2009(25).
[2]金建峰.曳引式电梯的能耗建模及节能研究[D].上海:上海交通大学,2009.
[3]诸小鹏.电梯曳引系统控制及节能技术的应用研究[D].南京:中国人民解放军理工大学,2005.
[4]朱铨流.关于电梯曳引条件计算方法的讨论[J].电梯工业,2004(4).
[5]刘金琨.先进PID控制Matlab仿真[M].2版.北京:电子工业出版社,2004.
[6]许力.智能控制与智能系统[M].北京:机械工业出版社,2007.
