一种基于整体区域特征的地面飞机识别方法
2014-04-03张连峰李元垒
王 威, 张连峰, 王 平, , 李元垒
WANG Wei1,2 , ZHANG Lianfeng3, WANG Ping2, LI Yuanlei3
1.长沙理工大学 计算机与通信工程学院,湖南 长沙 410114
2.国防科技大学 ATR国防重点实验室,湖南 长沙 410073
3.海军航空工程学院 青岛分院,山东 青岛 266041
1.School of Computer and Communication Engineering, Changsha University of Science & Technology, ChangSha 410114, China
2.ATR Key Lab, National University of Defense Technology, Changsha 410073, China
3.Qingdao Branch of Naval Aeronautical Engineering Institute, Qingdao 266041, China
1 引言
目标检测识别问题,尤其是关于飞机等飞行器的检测是国内外研究者一直关注的一个重要研究方向。随着数据采集设备精度的提高和模式识别技术的发展,基于高分辨率遥感图像的飞机目标的检测已经从单纯的目标检测发展到目标具体类型与型号的分析识别。
飞机识别根据需要不同,可以分为空中飞机识别以及地面飞机识别两类。在空中飞机识别方法中,由于飞机姿态以及成像角度的影响,需要综合考虑相似变换、仿射变换、尺度变化、云雾等遮挡等因素。目前,有很多相关研究提出了一些有效地处理方法。在进行地面机场中的飞机识别,研究者更加关注在不同区域内飞机变化情况,如飞机的转场、型号和数量的变化等等。Zhang Feng等[1]研究了如何利用小波时间不变量进行飞机目标识别。J.-W.Hsieh等[2]的方法则首先对遥感图像进行预处理,并进行旋转校正,分析飞机目标的对称性,然后通过样本训练,通过层次化方法进行具体型号识别。刘刚等[3]分别计算飞机目标的Hu矩和归一化转动惯量来构成组合不变矩,同时结合分割图像的面积比特征来实现飞机飞行姿态的识别。李兴唐[4]提出了基于飞行器结构特征点和仿射变换的飞行器识别算法。杜鸿英等[5]则通过构造飞机图像的模板库,提出了两种通过不变矩特征构造基本置信函数,然后运用D-S证据理论进行融合识别。朱旭锋等[6]提出利用飞机图像的仿射矩,Zernike 矩,小波矩,SIFT 特征点梯度模值,结合支持向量机组成分类器进行多分类器融合。王树国等[7]提出了可见光图像中飞机目标的 5 个典型识别特征的提取方法,最后利用模糊模式识别方法完成对飞机目标的识别。王刘莉等[8]提出了一种自适应核聚类算法。结合角点检测方法,可以有效的识别模糊图像中的多个飞机。李科等[9]首先建立机样本图像库,然后提取训练样本库中飞机图像的特征量,进行实验分类。
上述方法绝大多建立在图像分割和二值化的基础上,而遥感图像由于成像条件等因素的约束致使理想化图像分割变得困难而且不稳定。如果不能得到很好的图像轮廓信息,会严重影响目标识别结果。因此,需要研究不受分割结果影响的识别方法。本文采用区域整体特征对地面机场中的某些大型飞机进行型号识别,从而避免了不稳定的图像分割。首先对感兴趣的飞机参数进行分析,然后在高频信息增强Gabor滤波的基础上,通过比较滤波结果的先验信息进行飞机型号识别。
2 先验信息分析
得到包含飞机目标的区域图像后,首先需要对感兴趣的飞机目标的先验信息进行处理和管理。本文主要研究停放在机场中的大型飞机,目的是通过对地面停放飞机的识别,找出飞机型号数量的变化,为进一步分析和处理提供依据。图1给出了几种飞机的先验图像。

图1 部分感兴趣飞机型号的先验图像
在具体过程中,我们首先确定三个参数:机场所属国家、图像分辨率类型和区域大小。飞机所属国家参数主要由成像设备给出的经纬度确定,这样处理的好处是如果两个国家的主要机型尺寸类似,也可以较好分辨。图像分辨率则决定了飞机目标成像的大小。区域大小则根据分析确定,经过分析发现,一般战斗机的大小为长度 20米左右,翼展也大多数在 20米以内,而大型运输飞机则可能达到80多米。因此我们设置三种区域类型,分别是30*30,60*60,和 90*90。部分飞机外形尺寸如表1所示,表中对飞机真实型号进行了重新编号。
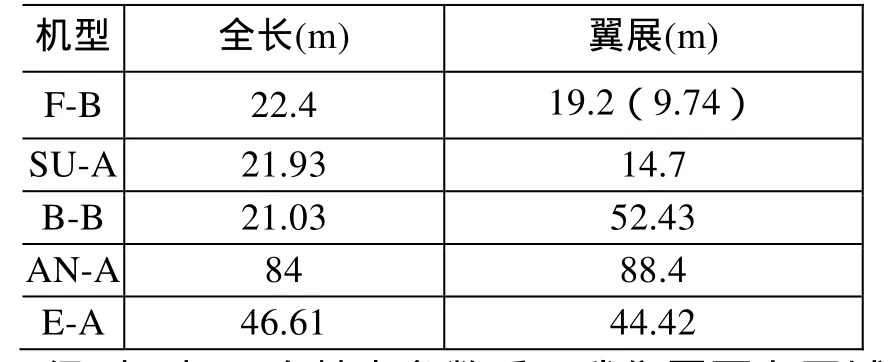
表1 部分飞机外形尺寸
得到飞机三个基本参数后,我们需要在区域上采集整体特征描述参数,将所有参数存储到数据库中作为先验信息。在待检测图像中计算出特征描述参数后,通过和数据库中的参数进行相似性比较来确定飞机型号。任务中采用Gabor滤波后的特征作为参数。在具体滤波过程中,由于我们主要关注的是目标的对称边缘区域,因此需要进行对称边缘的增强处理。同时,由于滤波具有方向性,要确定飞机的主轴方向。
3 目标主轴方向的确定
为了更准确的识别飞机,对飞机的定位进行修复显得很有必要。飞机都是以它们机身为对称轴,即使它们受到噪声污染,或是有的飞机有较长的翅膀,仍能保持对称。本文我们采用文献[2]的方法确定飞机对称轴。飞机对称轴的确定方法如图2所示。
对于飞机R,用φ(R)来表示的飞机对称性。如果θaxis是R的体轴方向,则应该满足以下公式:

Rθ由R通过旋转角度θ确定,在这个等式中,如果两个方向相差180度,则认为是相等。为了得到式(3),首先要计算对称测量Φ(R)。
The application of HWENO-LW scheme and immersed boundary method
假设 HR(j)表示位置 j处的水平方向:


图2 对称轴确定方法
其中wR为R的宽度。由此得到第 j行中心坐标x:

因此,可以用{xR(j)}的偏差来表示R对称性。XR的偏差为:


实际应用时,为了提高处理效率,可以采用由“粗”到“细”的方法:首先把可能的方向角范围粗略地量化到一个较小的集合当中。在此基础上,采用更小的量化阈值进行进一步量化寻找最佳角。
另外,用对称的方法估计飞机的轴方向,并不能判断机头位置。根据分析,飞机的头部占据的区域比它的尾巴要小,因此,可以根据两端的面积判断头部方向。本文不进行图像分割,但是主轴方向的确定仍然需要粗略计算灰度值较大的像素。
4 特征增强与提取
4.1 Gabor滤波
很多基于遥感图像的飞机识别,都会采用对图像分割得到二值化目标图像,之后再进行检测识别。因此对目标遥感图像进行二值化处理成为关键环节,是后期识别检测成败与否的关键。然而由于诸多因素的影响,例如成像条件、噪声等,使得从图像中分割出包含飞机目标的精确区域很困难,这会直接影响后期识别检测。鉴于此种影响,可以在整体区域上直接采用Gabor滤波,利用滤波结果进行判断识别[10]。
对于二维高斯函数 f(x, y):

其中,σ、(0,0)分别表示标准差和中心点,通过欧拉变化,可以得到进一步的关系:
其中ejws表示倾向于水平方向的波,在高斯包络条件下,可得:

定义f为中心频率,得到关系l=6σ/f,取一个角度θ,将其中的x, y通过以下方式进行取值:

实部定义为:

虚部定义为:

从上述公式中可以看出,f,θ, σ,为GaborR和GaborI三个参数。σ的取值大小和其能量是否分散有很大关系。针对每一个滤波器,进行运算中的卷积运算,可得Q(x, y):

4.2 对称高频信息增强的Gabor滤波
上面介绍的Gabor滤波是在整幅图像上进行的。然而,在基于形状匹配的目标识别过程中,真正有重要作用的是目标中的边缘等信息,也就是高频信息。具体到飞机目标识别,则可以认为是关于对称轴对称的高频信息,因此在目标对称轴确定以后,可以用对称高频信息增强的方法进行Gabor滤波。
图像可以分为低频部分和高频部分,因此对于图像I,可以表示为 I=IL+IH。其中IL表示图像中的低频部分,IH表示图像中的高频部分。由于边缘信息主要集中于图像的高频部分,与此同时,在我们研究的目标中,飞机目标具有对称性,因此在确定好对称抽之后,可以将目标高频部分进一步划分为对称部分IHU和非对称部分IHS,即图像可以表示为:

为了更好的进行滤波,设定系数向量为:λ=[λ1, λ2, λ3],则滤波后的图像为:

5 实验结果与分析
实验采用由同一卫星得到的带有经纬度和分辨率信息的遥感图像为研究对象,对大型飞机目标进行识别研究。大型地面飞机目标大多数停放在机场中。根据任务需要,能够停放大型飞机的机场在目标库中都有经纬度等情报信息。为了从图像中自动检测出大型飞机所在的位置,在得到需要处理的光学图像后,可以根据图像中的经纬度信息,在事先制作的ROI((Region Of Interest,感兴趣区域)数据库中查找与需要处理的光学图像 A相匹配的ROI图像,通过经纬度坐标进行图像截取。由于采集图像之间的时相不可能完全一致,因此首先应该进行灰度归一化和仿射变换,然后进行背景减法二值化,得到粗略的结构信息。然后通过结构信息对目标进行初步筛选,找出疑似飞机的目标。最后,在需要处理的图像A上进行对称信息增强的Gabor滤波,进行识别。为了使识别结果更加准确,在初步筛过程中,我们还采集了分辨率、目标所在位置所属国家、以及识别时使用的矩形框大小信息,也作为匹配特征使用。如:在美国势力范围内,不检测苏型飞机;在一米分辨率下,,因为我们感兴趣的飞机长度都在 90像素以内,因此如果目标长宽超过90像素,则自动分辨出不是飞机目标。
因为实验主要是为了验证方法的有效性,因此实验中采用固定参数λ=[0.5,0.8,1.5],Gabor滤波器参数为(3,3,2π)。实验流程如图3所示。

图3 飞机检测识别流程图
根据流程,我们进行了实验。在进行结果判断时,因为目标识别很难做到百分之百的肯定,所以采用相似度来衡量待检测图像和已有目标的匹配程度,相似度S的计算公式为:

其中为相似度,n为特征参数个数,而ωi为第i个参数的归一化权值,试验中采用平均权值实验结果如图4所示,在图4中的上图中,左边是待处理的原始图像,右边是根据边框大小剪裁的经过对称轴确定后的目标区域。
实验共采用96幅相关遥感图像,在这些图中共有256架不同型号的飞机。这些图像是关于M国和R国的部分特定飞机场的不同季节和不同时相的遥感图像,首先人工挑选50幅比较清晰的飞机图像作为先验信息的采集样本,然后再所有图像上进行分析识别。实验结果中的部分参数如表2表3所示。其中共检测出飞机235架,有189架正确,46架检测错误。由此可得查全率(recall)为:91.79%,查准率(precision)为80.43%,基本达到了预期目的。在实验中,我们并没有和基于分割的方法进行比较,这是因为不同分割方法以及不同图像类型对结果影响很大,方法之间不具有可比性。

图4 飞机检测识别结果

表2 部分飞机的滤波结果(实部)

表3 部分飞机的滤波结果(虚部)
6 结束语
本文研究了地面飞机目标的识别方法,实现了遥感图像中的飞机目标的自动检测识别并取得了较好的效果。需要进一步说明的是,本方法的研究是根据具体类型的遥感图像展开的,在实验过程中选择的是满足一定约束条件(如无遮挡,无云雾等)的图像。针对更加复杂的情况,识别检测效果会有较大的下降,针对上述复杂情况,还需要从理论和实验方法上进一步研究。另外,由于开始时受样本的限制,我们只采用数据库管理的方式进行比较,随着多时相实验数据的增加,可以考虑利用分类器对数据进行分类识别。
[1]Zhang Feng,Liu Shang-qian,Wang Da-bao,Guan Wei.Aircraft recognition in infrared image using wavelet moment invariants [J], Image and Vision Computing, 2009,27:313-318.
[2]J.-W.Hsieh, J.-M.Chen, C.-H.Chuang and K.-C.Fan.Aircraft type recognition in satellite images [J], IEE Proc.-Vis.Image Signal Process, 2005,152(6):308-315.
[3]刘刚,梁晓庚,张京国.基于红外图像的飞机目标关键攻击部位识别[J], 计算机工程与应用, 2011,47(24):174-177.
[4]李兴唐, 曹立, 王思雯.仿射变换的飞行器识别[J], 光学精密工程, 2009, 17(2):402-408.
[5]杜鸿英, 郭雷, 李晖晖, 刘坤.基于不变矩与证据理论的飞机序列图像识别[J], 计算机仿真, 2010, 27(2):92-95.
[6]朱旭锋,马彩文.基于多不变量和多分类器融合的飞机识别[J], 仪器仪表学报, 2011, 32(7):1621-1627.
[7]王树国, 黄勇杰, 张生.可见光图像中飞机目标的特征选择及提取[J], 哈尔滨工业大学学报, 2010,42(7):1056-1059.
[8]王刘莉,吴秀清,牛宗标.模糊图像中的飞机识别方法[J],计算机仿真, 2006,23(3):164-166.
[9]李科,王润生,王程.一种用于飞机型号识别的树分类器方法[J], 计算机工程与科学, 2006,28(11):136-139.
[10]曾姝彦,张广军,李秀智.基于Gabor滤波器的图像目标识别方法[J].北京航空航天大学学报,2006,36(8):954-957.
