改进转角法的实现及在海洋测绘中的应用
2014-04-03魏荣灏李京兵史永忠
魏荣灏,李京兵,史永忠
(浙江省河海测绘院,浙江 杭州 310008)
1 问题的提出
在海洋测绘工作中,采用验潮方法对大范围海域进行小比例尺测绘时,使用单潮位站进行水位改正的方法难以满足技术规范[1]的要求,必须进行分带潮位内插;采用多波束测深系统进行大比例尺测量时,为了保证测区数据全覆盖,获取数据常常会超出测量范围;另外,大部分多波束后处理软件常以矩形为单元处理数据,处理结果导出后往往与实际复杂的测区形状不同,测区外部经常存在多余数据,因此,必须对测区内外的数据进行筛选。采用人工方式操作时,不但费事费力,还容易出现错漏,需要反复操作,比较枯燥。若采用计算机自动处理,主要工作在于判别测点数据与测区的相对关系,即判断点与多边形的相对关系。
判断点在多边形内或外是一个基本却又非常重要的问题,在计算几何、计算机图形学、模式识别和地理信息系统中有大量的应用。为解决该问题,国内外众多学者已经进行了大量的研究,提出的算法主要可以分为2类:奇偶法 (射线法)[2-4]和非零环绕数法 (转角法)[2,5,6]。如果多边形是简单的 (没有自相交点),那么2个算法都可以给出相同的结果;但对于非简单多边形,转角法则有很高的精度。传统观点认为射线法的效率较高,转角法的速度较慢。
本文主要针对实际工作中需要判别点与任意多边形的关系,特别是存在自相交与带岛等特例的情况,研究利用改进的转角法判别点与多边形的相对关系,实现算法并应用于实践。
2 转角法及其改进模型
2.1 转角法
转角法是对角度的积分算法[7]。为了使其具有普遍性,定义在二维平面中某个封闭曲线关于某点的环绕数wn。令C(u)= (x(u),y(u)),0≤u≤1且C(0)=C(1),是二维连续曲线,点P为不在C(u)上的点。令CP(u)=C(u)-P为从点P到C(u)的矢量,且其单位方向矢量为W(u)=CP(u)/|CP(u)|。则该式定义了一个连续的从曲线C到单位圆S1的映射,且 W(u)可以表示为 W(u)= (cos(u),sin(u))。式中:(u)是正的逆时针方向的角。环绕数就等于W(u)环绕S1的次数的整数部分,可用式(1)表示:
在处理任意点P与由顶点V1,V2,……,VN=V0构成的多边形相对关系时,积分可以简化为计算带符号的角度的总和,这些角为PVi与PVi+1的夹角。若i=angle(PVi,PVi+1),则有:

当代数和为0,则点P在多边形的外部,否则,点在多边形的内部或边界上。
2.2 改进的转角法
由于转角法中使用了非常耗时的arccos函数,故效率不高,改进的转角法可以克服该缺点。在S1中任取一点Q。由于曲线W (u)环绕,则其可能多次经过Q点。当W(u)按逆时针方向经过Q点时,记为+1次;顺时针则记为-1次,则次数总和就是W环绕S1的次数,正好等于环绕数wn。以被检测点P为端点向Q方向延伸做一条射线R,则R穿越C的交点与W经过Q的点是一一对应的。当R从C的右边跨到左边时,该穿越数为正,记为+1;反之为负,记为-1。当曲线C退化为多边形时,算法只需要对多边形C的每一条边做一次判断。对所有的边测试完后,将所有的穿越值加起来就是环绕数wn了。当wn为0时,点在多边形外;否则在多边形内[7]。
3 算法实现
改进的转角法不但具有与射线法相同的效率,且更加精确[7]。实现该算法的问题主要有2个,一是射线的穿越数正负判别,二是射线的选取。在讨论完这2个问题后,将算法进行具体实现,并与人工处理结果进行验证。
3.1 穿越数符号判别
判别穿越数的正负号时,可以通过曲线C的一个法线矢量与方向适量Q的数量积的符号来判断。当曲线C退化为多边形时,只需要对C的每一条边做一次判断。
在实际判别过程中,不需要计算射线与边的交点,只需要判别点P是否在边的左边。对于方向向上与方向向下的边的判别与是否在左边的规则不同。对于方向向上的边,如果穿越射线到达P的右边,则P在边ViVi+1的左边 (见图1);对于方向向下的边,若穿越射线的正方向,则P在边 ViVi+1的右边 (见图2)。
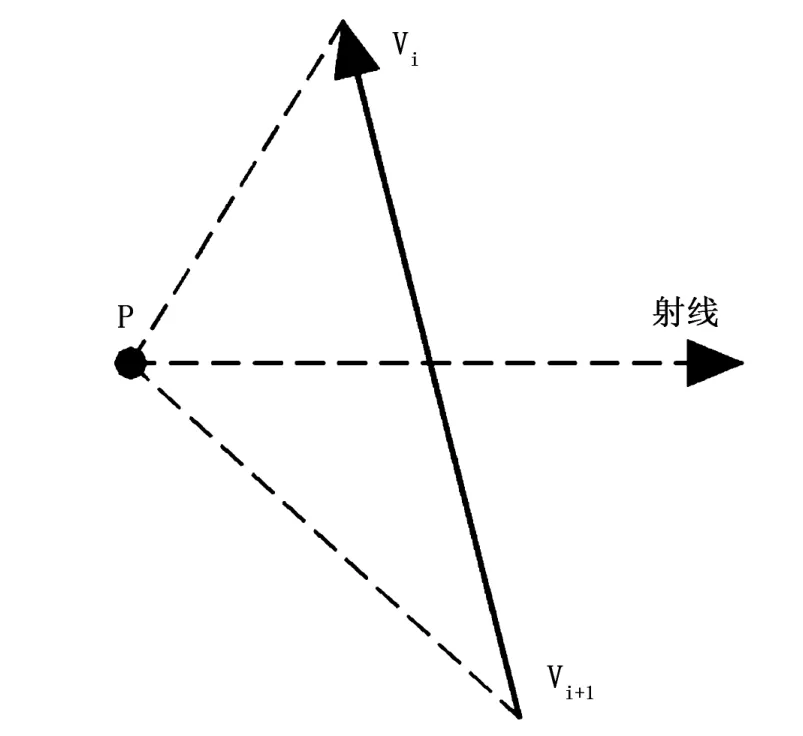
图1 方向向上的边判别图
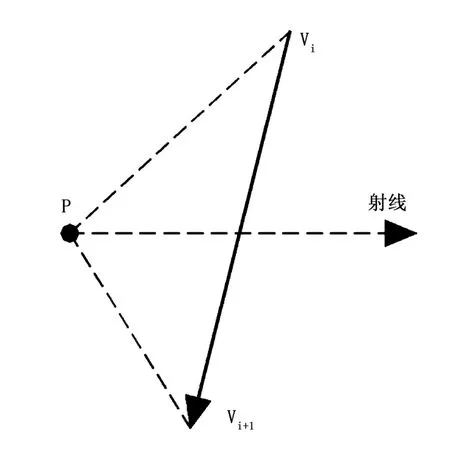
图2 方向向下的边判别图
3.2 射线选取
为了减少程序的计算量,常选取为一条向点P右边延伸且平行于X轴的射线。利用这条射线可以很容易地判别是否与多边形的边有交点。为了计算环绕数,算法简单地遍历多边形的所有边,测试是否穿越边及与穿越边的相对关系 (左右侧),最后将环绕数求和,便可判断其对应关系。
3.3 算法实现
根据2.2节的改进算法,编制程序进行具体实现。判别点与多边形的相对关系时,为了提升程序的处理效率,在读取多边形的各条边的坐标数据后,先生成一个涵盖该多边形的最小矩形范围,然后再依次计算并保存多边形各条边的相关参数,降低程序计算量。在判别点与多边形的相对关系时,首先判别点是否处于最小矩形范围内,如果点不在该范围内,则不可能落在多边形内,可直接排除;利用2.2节算法,依次判别各个数据点与多边形各条边的相对关系,计算点的环绕数。若环绕数等于0,则该点在多边形的外部;否则,该点在多边形的内部,并对其进行标记。处理完所有的数据后,将结果保存到文件中。
3.4 算例验证
为了验证程序的正确性,采用象山港某航道1∶500的多波束测量数据进行测试。测试区域分为2个部分,第一部分为四边形,第二部分数据为任意多边形,其中数据格网间距为4m,共有425301个。如果采用人工方式在AutoCAD中进行筛选,由于数据量大、导入时耗时长、操作效率低,容易产生错漏。采用程序处理时,只需按照给定的格式分别编辑多边形角点坐标及测点数据,便可以得到筛选后的结果。分别将采用人工方式和程序自动筛选的数据放在一起进行比较,两者之间的结果基本一致,采用程序进行处理效率较高。
4 结 语
本文通过分析点与多边形的相对关系,研究利用改进的转角法对地形数据进行筛选,使用该方法不但精度高,而且效率高,有效提高了作业效率。但是,目前该方法主要针对测区可以由多边形进行定义的情况,若测区边界存在圆弧等情况,则只能采用逼近或者人工局部干预的方法。为使算法满足更多情况,则需要继续研究。
[1]中交天津航道局有限公司,中交天津港航勘察设计研究院有限公司.JTS 131—2012水运工程测量规范 [S].北京:人民交通出版社,2012.
[2]Franco P.Preparata,Michael Ian Shamos.Computational Geometry:An Introduction [M].New York:Springer-Verlag,1985.
[3]周培德.判定点是否在多边形内部的算法 [J].北京理工大学学报,1995,15 (4):437-440.
[4]张宁宁,张树有,谭建荣.映射相关边概念的多边形内外点判别算法 [J].计算机辅助设计与图形学学报,2004,16(7):935-938.
[5]沈陈华.平面上点与多边形包含关系的Q算法 [J].扬州大学学报,1999,2 (4):24-26.
[6]董秀山,刘润涛.判别点与简单多变性位置关系的新算法[J].计算机工程与应用,2009,45 (2):185-186.
[7]张宏,温永宁,刘爱利.地理信息系统算法基础 [M].北京:科学出版社,2006.
