自动上下料机械手手部结构的设计
2014-04-02黄文婷
卷宗 2014年12期

摘 要:自动上下料机械手是一种模仿人手动作,根据控制程序自动完成操作的装置,本文进行了机械手手部结构的设计,该机构液在压缸的驱动力下,可以实现圆柱类零件的抓紧与放开。
关键词:机械手;手部;结构设计
在现代工业生产自动化领域里,材料的搬运、机床的上下料、征集的装配等是个薄弱环节。在机械工业部门,这些工序的费用占全部加工费用三分之一以上,所费时间约占全部加工时间三分之二以上,而且绝大多数的事故发生在这些工序。自动上下料装置和工业机械手就是为实现这些工序的自动化而设计和采用的。
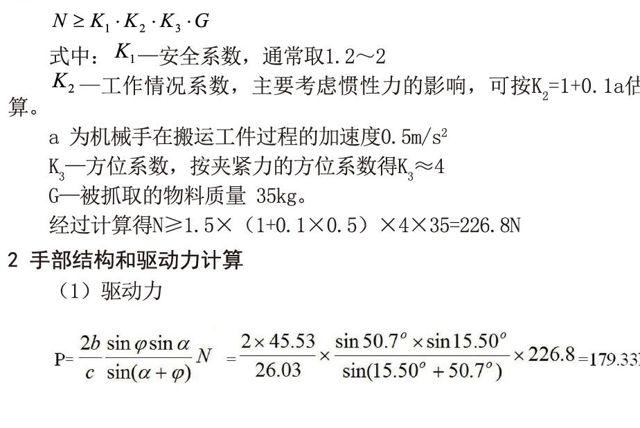
1 手指夹紧力的计算
上下料工业机械手是一种模仿人手动作,并按设定的程序,轨迹和要求代替人手抓、搬、运或者操作工具进行操作自动化的装置。在保证机械手有足够的强度与刚度的条件下,尽可能的从结构与材料上设法减轻机械手的重量,力求选高强度,轻质材料。针对物料质量是10~50kg,圆柱体零件,截面直径Φ100mm,利用液压缸驱动,实现机械手对零件的抓紧与放开。因此,手指对工件的夹紧力克按下式计算:
作者简介
黄文婷(1990-),女,江西科技学院,机械工程学院,硕士,助教。研究方向:机械设计及理论