基于卫星导航系统的列车定位技术现状与发展
2014-04-01刘江蔡伯根王剑
刘江,蔡伯根,王剑
(1. 北京交通大学 轨道交通控制与安全国家重点实验室,北京,100044;2. 北京交通大学 电子信息工程学院,北京,100044)
当前我国铁路运输处于高速发展时期,在支撑铁路系统运行发展的众多支撑技术中,位置服务已显示出其重要性,特别是事关安全的列车运行控制、调度指挥、安全预警等位置应用系统,对准确、实时掌握列车位置与运行状态. 提出了切实需求。由于列车只运行在固定轨道上,铁路线路限定了列车运行的空间范畴,实际使用的列车位置是以线路固定位置为起点,沿线路方向延伸的一维距离度量。适于一维属性的列车定位方式及传感器选择方案与道路车辆、水运船舶等运输载体相比存在固有特殊性。传统列车定位系统广泛采用测速测距方式,在一维坐标系下将速度、位置描述统一起来,选择安装于列车动轮轮轴上的速度传感器实现速度/距离测量,方案简单、不易受干扰,时至今日仍广泛应用于各类列车。然而,随着铁路智能化、现代化发展,相关系统结构功能日趋复杂,列车运行速度及服务等级提升对列车定位的要求越来越苛刻,车轮空转、打滑、磨耗等速度传感器测速定位的制约因素引发定位系统优化的迫切需要,应答器、多普勒雷达、惯性传感器、涡流传感器等方式下的列车定位方案不断产生[1]。以“应答器+速度传感器”为代表的组合模式成功应用于高速铁路。然而,高昂的建设维护成本导致其成本与性能之间的矛盾,制约了自主性及性能效益的实现。近年来发展迅速的卫星导航定位因其实时、高精度、全天候等特性得到广泛关注与应用[2]。世界上已建成包括GPS,GLONASS 及我国北斗二代卫星导航系统在内的多个全球导航卫星系统(global navigation satellite system,GNSS),此外还包括欧盟GALILEO 系统以及日本、印度等国的区域及增强系统。将卫星导航系统引入列车定位领域,能够使列车定位尽量减少对地面设备的依赖,实现低成本与高自主性优势,符合现代铁路安全/非安全应用服务的发展需要。卫星导航系统在列车定位领域的应用能够充分利用卫星资源的突出优势,激活并优化众多铁路系统基于位置的应用服务。国内外研究人员在基于卫星导航的列车定位技术与方法方面开展了大量工作,取得了许多有价值的成果。未来随着卫星导航资源的不断充实,将在系统集成、性能优化、服务拓展等多个方面得到不断深化并发挥效用。本文作者将对卫星导航系统应用于列车定位的原理与需求进行分析,综述国内外技术发展与研究进展,并将对其未来方向进行展望。
1 列车卫星定位原理与需求
采用卫星导航系统的模式下,以高速运动的卫星瞬间位置作为已知计算依据,采用空间距离后方交会方法可确定列车车载接收天线所在空间位置。为进一步提高列车定位对复杂及苛刻信号接收条件与环境的适应性,利用辅助传感器与卫星导航定位进行组合是一种必然选择。图1 所示为一种典型的基于多传感器集成的列车定位系统结构。
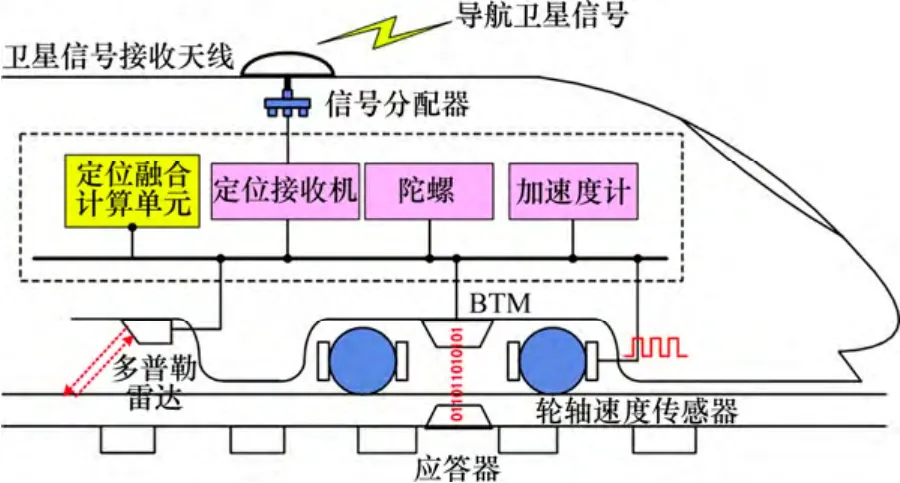
图1 基于卫星导航的列车定位系统典型结构Fig.1 Typical system structure of satellite navigation system based train positioning
从列车定位的空间属性来看,不同于常规道路车辆在二维空间中的运行特性,列车在既定轨道线路上的运行可以看作一种“受约束”的特殊运行方式,这也造就了列车定位的典型特点,概括为以下3 点:
1) 坐标系定义方式。列车位置是一种一维相对位置,通常在轨道上以某个固定参考点建立沿轨道的一维位置参考坐标系,利用列车在所在方向与该参考点的相对距离描述列车位置。
2) 坐标系对应统一。卫星导航定位结果通常是椭球坐标系下的三维空间坐标位置,因此,最终列车位置求解需通过坐标变换以符合轨道坐标系约束。图2所示为青藏铁路某站地理地图与站场示意的对应实例。为保证位置描述在多股道并存条件下的唯一性,通常以铁路正线位置为基准进行统一定义。
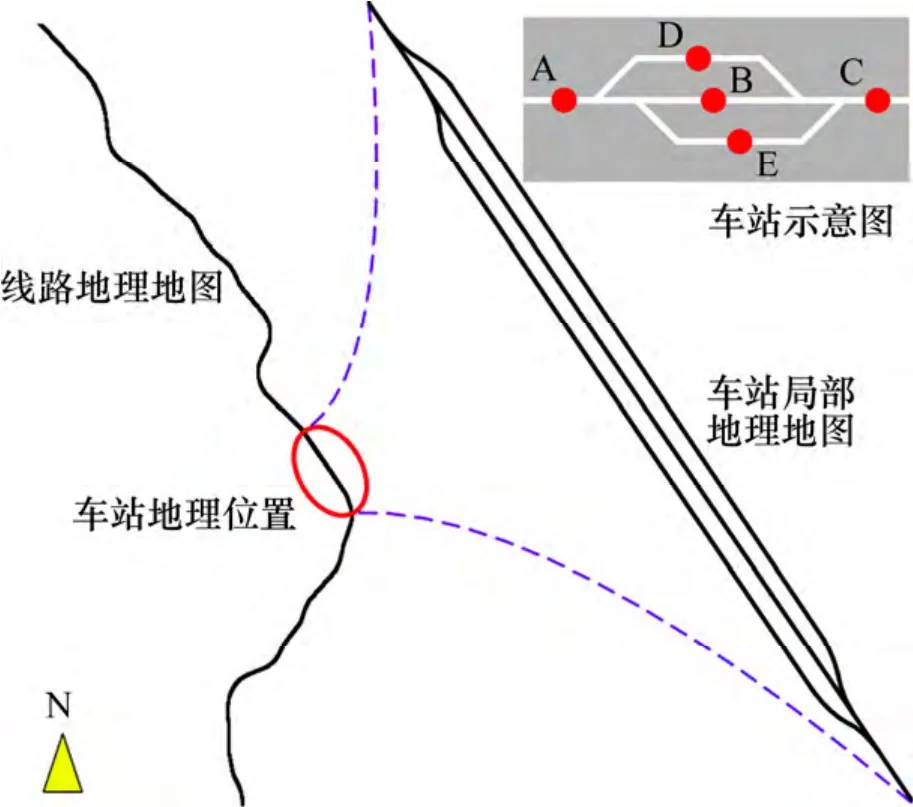
图2 铁路线路地理地图与示意图的对应Fig.2 Corresponding relationship between the geographical railway track map and schematic diagram
3) 安全性紧密关联。安全是铁路系统一切活动的首要前提,列车位置与其相关铁路系统安全应用具有紧密联系。以列车运行控制为例,计算所得列车前端、后端位置需增加一定的安全裕量,从而形成一维安全包络,降低定位的不确定性对位置信息应用安全的影响。
列车定位特性赋予卫星导航新的应用特征,不同的列车位置应用对列车定位的需求,特别是在定位性能方面,以安全为出发前提可拓展至多个方面,包括精确性、完好性、连续性、可用性及覆盖度等。与铁路可靠性、可用性、可维护性和安全性(reliability,availability, maintainability and safety,RAMS)需求之间的关联赋予列车定位应用特殊性。基于卫星导航的列车定位及应用性能框架如图3 所示。图3[3]以安全性和可信性为核心描述了基于卫星导航的列车定位及应用性能框架,明确了卫星导航定位性能与铁路RAMS 指标体系间的关系,这些目标也促进了众多相关科学应用问题构成面向性能优化的研究方向。
2 国内外应用与发展
伴随GPS 的发展应用,美国较早开展了卫星导航在铁路定位领域的研究,最早可追溯至20 世纪80 年代的ARES(advanced railroad electronics system),提出采用GPS 替代轨道应答机的定位方式[4]。20 世纪90年代中期开展PTS(positive train separation)计划,对采用惯性器件辅助DGPS、转速计及轨道地图构成列车定位系统的可行性进行了尝试。同期,采用DGPS、速度传感器及轨道地图的增强型列车控制系统(incremental train control system,ITCS)成功开发,至今已在中国、澳大利亚一些低密度线路上得到实际使用。如今,基于DGPS、速度传感器及电子地图的列车定位系统仍在开发完善中,如NAJPTC 计划等[5]。21 世纪以来,美国正在分阶段实施铁路列车碰撞防护系统(collision avoidance system,CAS),利用广域差分辅助GPS 为铁路客货运输及现场工作人员提供安全保护[6]。
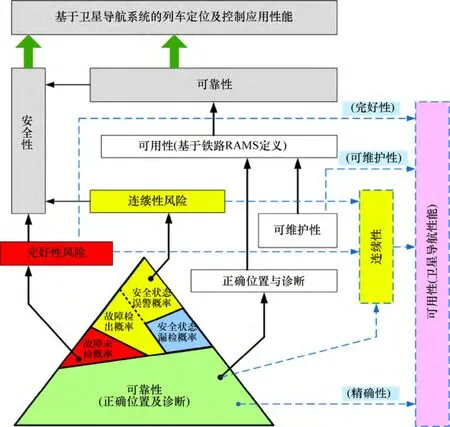
图3 基于卫星导航的列车定位及应用性能框架Fig.3 Performance frame of satellite navigation based train positioning and application
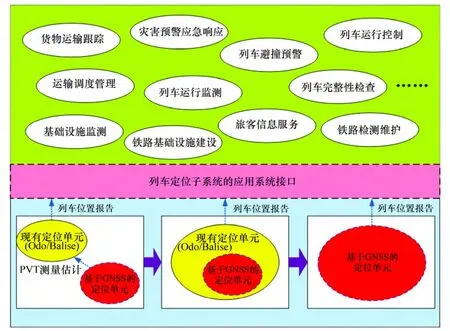
图4 欧洲基于卫星导航的列车定位技术发展策略Fig.4 Developing strategy of satellite navigation-based train positioning technology in Europe
欧盟自20 世纪90 年代即提出构建全球化卫星导航系统的计划,逐步发展GALILEO 卫星导航系统,并将铁路安全运输作为GALILEO 系统拓展应用服务的重要方向。特别是在列车控制方面,为提高运营效率、互操作性与安全性,降低运营成本,国际铁路联盟启动ETCS-LC(European train control system-low cost)计划,利用卫星导航集成多种传感器替代常规ETCS 位置决策系统(location determination system,LDS)。欧盟先后启动多项计划对卫星导航铁路生命安全应用所需的技术标准等进行探索,如APOLO[7],GADEROS[8], INTEGRAIL[9], LOCOPROL[10],RUNE[11],GRAIL[12],ECORAIL[13]和DemoOrt[14]等。为了对既有列车测速测距模式形成互操作并实现渐进化发展,规划了3 个阶段的发展策略,如图4 所示,以逐步实施卫星导航的体系化应用。随着卫星导航产业规模的扩展,卫星导航系统在欧洲铁路运输系统众多安全应用中得到了更多重视,最具代表性的是2010年德国宇航中心RCAS(railway collision avoidance system)计划[15],基于电子地图辅助卫星导航实现精确列车定位,对未来卫星导航在铁路系统中的结合应用起到重要的推动作用。
俄罗斯继承前苏联1976年开始构建的GLONASS系统,近年来逐步加强了对其卫星导航系统的部署和维护工作,并正逐步将卫星导航纳入铁路列车定位方案。1992 年,莫斯科COMPASS 设计局在GLONASS卫星导航系统基础上,与莫斯科铁路管理局联合开发了卫星导航接收设备,由试验证实了在列车位置管理上应用卫星导航的可行性。在此基础上,自1997 年起研制列车安全设备KLUB-U,利用GPS/GLONASS 导航设备及车载线路地图实现精确位置检测,2002 年至今已在俄罗斯铁路数千列机车上安装使用[16]。
随着北斗二代系统快速发展,我国已具备自主化卫星导航系统的掌控能力,并带动卫星导航产业在多个应用领域的发展。铁路运输作为重要应用领域之一,受制于发展模式以及安全特性,卫星导航未被广泛纳入我国铁路系统技术体系,仅在一些对性能要求较低的应用中被采纳,如在机车综合无线通信设备中用于GSM-R 与450 MHz 通信频点的切换等[17]。2006 年开通的青藏铁路因其特殊自然地理条件,引进了美国的ITCS 列控系统,采用差分GPS 定位技术进行列车定位及占用检查。为有效应对GPS 用于列车控制的可靠性、安全性及自主性问题,我国近年来已逐步开始卫星导航系统用于铁路系统的相关工作[18]。
纵观当前世界各主要卫星导航技术持有国在铁路列车卫星定位方面的应用现状,卫星导航系统资源及技术发展与铁路系统智能化、现代化的发展需求共同促进了两者的结合,未来卫星导航逐步拓展到铁路列车定位应用是不可避免的必然趋势。利用卫星导航系统实现列车定位功能、性能及应用拓展所需的核心理论、技术策略是决定其发展的关键因素。
3 研究进展
3.1 列车定位专用型卫星导航接收机设计
卫星导航接收机作为接收处理导航卫星信号的关键设备,在用于铁路列车定位实际过程中,需对其信息属性、安全性及效用性进行针对性设计。Filip 等[19]早期即开始对卫星导航用于铁路列车定位的主要问题进行总结,指出在铁路线路以及道岔等关键位置出现卫星信号盲区的可用性及安全性风险,分析了卫星导航在列车定位的适应性及应对措施。Marais 等[20]利用PREDISSAT 工具对列车运行环境的卫星信号多径模型及可视模型进行了分析。Polivka 等[21]概括了卫星导航用于列车的安全风险,如SIS(Signal-In-Space,空域信号)可用性限制、多径、SIS 验证失效及电磁干扰等。Wiss 等[22]对卫星导航在列车定位应用领域的需求进行归纳,形成了GNSS 铁路定位应用技术开发的指导性文件。这些前期工作成果为卫星导航专用接收机相关技术开发以及实用化提供了重要依据。
常规基于硬件结构的卫星导航接收机因其低灵活性及硬件依赖性,无法对功能结构、计算处理逻辑等进行针对性调整。为对用于列车定位的接收机进行应用适应性优化,研究人员引入软件接收机思想,采用软件化结构实现部分甚至绝大部分替代硬件装置完成卫星信号接收处理功能,以较为简便灵活的手段对接收机内部的处理逻辑、功能结构做出调整。Bertran等[23]分析了列车设备环境下硬件GPS 接收机的电磁干扰情况,验证了软件接收机列车定位方案的必要性。梁前浩[24]设计实现了用于列车定位的软件接收机结构与弱信号环境处理逻辑。安毅[25]针对卫星可视性不完备条件提出了解决方案,设计了三星、双星及单星定位算法满足列车定位及完整性检查的要求。
列车定位专用卫星导航接收机的设计中,与列车位置应用的有效耦合是另一重要方向。欧盟GALILEO FP6 框架的Grail 计划,首次提出“铁路生命安全接收机”(rail SoL receiver)的概念,从铁路系统提供生命安全服务(service-of-life,SoL)能力的角度出发,提出了卫星导航在列车运行控制等安全苛求系统的应用规范及专用技术[26]。此外,已有针对卫星导航铁路列车定位应用的相关测试验证平台相继出现,如CaRail 和PREDISSAT (PREDIctive software for satellite availability in the field of transport)工具等[27],为卫星导航未来在铁路运输领域的应用形成了良好的技术储备,对面向铁路运输领域的接收机专业化及市场化发展具有重要推动作用。
3.2 卫星导航与多传感器的数据融合理论
在设计实现基于卫星导航的列车定位系统时,为确保在不同工作条件下均能满足列车定位需求,需要根据实际情况为其配置辅助传感器,以应对列车运行可能面临的恶劣及极端条件。辅助传感器的选择本质上在于对列车位置状态中若干或全部属性在测量域的补充,如何尽可能挖掘传感器测量能力并获取高性能定位结果是关键问题。多传感器数据融合技术为这一问题提供了有效解决思路,其目的在于根据特定规则对多种传感器的感知信息进行综合处理,从而得到对客观目标的统一理解与认识。
列车定位传感器的选择直接决定融合估计逻辑所需系统及量测模型,从传感器组合策略上看,考虑不同信息来源的互补性与相容性,任何能对卫星定位可能的性能降级、功能终止进行补偿的感知资源均可用于构成组合定位系统。近年来,集成涡流、视觉、光纤光栅传感器的多种新型方案均已有探索尝试[28-29]。组合融合所需误差建模、信息变换、结构调整等策略的选择也促进众多列车卫星定位辅助方案的产生。
在利用卫星导航与其他传感器构成组合结构策略的情况下,滤波估计是利用多源信息对特定状态进行准确判别的重要途径,近年来,随机系统贝叶斯估计方法方面形成了众多成果。贝叶斯方法将未知参数看作随机变量,使用先验概率和当前观测信息计算后验概率,构成协调先验信息和当前信息的统一框架[30]。Kalman 滤波作为贝叶斯估计基于高斯假设在线性随机系统中的一种具体形式,被用于众多列车定位系统的研究开发方案[31]。然而,由于Kalman 滤波无法应对非线性、非高斯条件的约束,促使EKF,UKF 和CKF 等非线性滤波方法被引入列车组合定位融合。以Monte-Carlo 模拟为基础的粒子滤波作为一类重要方法也被用于列车组合定位,确保滤波估计对实际列车运行环境非高斯条件具备稳健的处理能力[32]。此外,考虑列车定位信息在支撑特定应用时的安全敏感性,鲁棒估计方法为提高系统对故障、干扰及不确定性因素的容忍能力提供了有效途径[33]。融合估计理论方法的发展,未来还将在与列车定位应用的结合中产生更多创新方向。
3.3 轨道电子地图生成及辅助列车定位方法
基于列车位置的空间从属性,轨道电子地图为地理坐标与一维轨道坐标体系的映射提供了有效途径。轨道地图以某种组织原则构成数据库,对轨道线路对象位置在不同坐标体系下的表达给出具体描述,形成类似“字典”的参照作用,其研究集中在大规模测量数据处理[34]、数据库构建[35]、铁路曲线整正[36]以及效能评估[37]等方面,总体上仍处于发展阶段。国外包括WCRM,LOCOPROL,OpenTrack 和ITCS 列控系统等均对轨道电子地图进行了探索,但目前尚未形成统一标准。RailML 标准对铁路电子地图规范接口形式起到了推动作用[38]。从轨道电子地图的应用层面来看,列车定位系统采用的地图信息应用方法对地图发挥的辅助能力具有决定性作用。根据地图信息在定位处理逻辑中的耦合深度不同,可以将其划分为2 个层次。
首先,地图匹配作为基本的地图应用模式,在列车定位中提供了一种松散耦合层次的辅助方案,目前已形成了基于线路拓扑分析、相似度、概率描述等多种不同类别的计算方法[39]。针对铁路线路在车站等区域存在多股道并存的情况,轨道电子地图的引入为股道识别提供了更优的选择,隐马尔科夫模型[40]、Hausdorff 距离[41]等方法为轨道占用识别及精确匹配提供了可行思路。其次,考虑地图信息与定位传感器测量的独立性和属性同一性,可以将其统一纳入融合估计构成紧密耦合辅助方案。Zheng 等[42]利用不同精度等级的轨道地图信息实现紧耦合列车定位方案。李翀[43]提出了地图辅助列车定位解算模型,有效提高了列车定位对导航卫星信号质量的适应能力。
在利用轨道地图辅助实现列车定位的过程中,出于列车位置应用模式适应性考虑,虚拟应答器(virtual balise,VB)是有一种独特的地图辅助定位方式。国际铁路联盟将其定义为“一个通过软件处理GNSS 组合单元定位信息并实现应答器功能的车载系统”[44],其主要特征在于与现有铁路设备规范相兼容,利用卫星定位结果与已存储应答器位置的电子地图进行“虚拟捕获”,从而替代物理应答器设备功能。文献[45]给出了欧盟GADEROS 计划对虚拟应答器原则和整体结构的设计方案。国内已有虚拟应答器捕获算法、报文编制等方面的研究成果[46]。这些积累能为我国自主发展基于卫星导航的铁路安全应用提供有效技术参考。
3.4 列车卫星定位的完好性及安全性保障
面向生命安全的铁路系统应用服务对采用卫星导航实现列车定位的完好性及安全性提出了十分严格甚至苛刻的要求。完好性与安全性从不同层面反映了列车定位系统满足安全相关应用需求的能力。从列车定位内在过程来看,完好性从策略方法层面描述了系统各功能过程状态正确性及性能水平的可信程度[47]。完整的定位过程包括传感器信息提取、融合及地图辅助操作,所采用的定位完好性监测方法也各具针对性。
在列车定位传感器信息提取过程中,完好性保障监测直接作用于传感器原始测量可能的故障异常,Filip 等[48]对采用冗余检验的故障检测方案进行了设计;Mirabadi 等[49]提出采用多滤波器残差χ2 检验的列车定位传感器故障检测方法;此外,小波变换、主成分分析、统计检验等基于信号处理方法用于列车定位故障检测能更为灵活地取得较理想的诊断性能和隔离能力[50-51]。在列车定位传感器数据融合过程,可用保护水平、可信度水平等表征估计状态,Filip 等[52]提出一种定位自主完好性监测(locator autonomous integrity monitoring,LAIM)方法,利用概率数据关联滤波及统计量检验监测完好性;唐一哲[53]将滤波残差拓展至列车安全缓冲以确保列车定位系统的完好性水平;此外,将估计方差、Slope 等多种方式集成能够获得更完备的完好性保障能力[54]。在列车定位的地图辅助校正过程,从输出层面衡量定位完好性能够有效避免不确定性带来的困难,Jana[55]提出基于匹配偏差统计特性检验的完好性监测(position integrity monitoring, PIM)方法;Zheng[56]将接收机自主完好性监测方法直接用于紧耦合解算模型,实现对地图辅助定位过程的一体化监测及完好性优化。
从列车定位的外在表征来看,卫星导航赋予列车定位的系统特性及风险模式与铁路系统对列车位置服务的需求之间还存在一定差异,对二者进行统一将对卫星导航在铁路列车定位领域的应用特别是在关于铁路运营首要前提的安全性方面具有决定性意义。欧盟长期以来针对GALILEO 系统铁路应用的安全分析及验证方面取得了重要成果,包括卫星导航在铁路生命安全领域应用的安全性概念探索[3]、形式化建模分析[57]、验证体系框架[58]、量化需求验证[59]以及卫星导航与铁路RAMS 需求体系统一描述[60]等。近年来,全生命周期模型[61]等铁路系统安全设计思想的引入促进了卫星导航在安全苛求系统设计、开发、验证工作的科学性和规范化。在参考验证层面上,以DemoOrt系统[62]和测量参照平台CaRail[63]等为代表的应用开发成果为未来对卫星导航铁路定位安全应用的测试、校核、验证等提供了重要的平台技术基础。
4 未来发展展望
近10 年来,我国铁路运输处于高速发展时期,国家“十二五”规划明确了未来我国铁路建设进程的主要目标,以高速铁路、中西部地区线路为主导的建设发展规划为卫星导航系统在铁路领域的长远部署提供了关键的阶段性机遇,为我国自主掌握并利用北斗卫星导航系统提出了紧迫需求。世界各主要卫星导航资源持有国均在积极进行应用探索和稳步实施,这也为我国北斗二代卫星导航系统这一新兴产业与铁路运输系统的合理融合带来了重要的外部环境与战略挑战。未来在基于卫星导航的铁路列车定位领域尚有许多工作需进一步深化,主要集中在以下4 个方面。
1) 多模卫星系统的兼容并用。卫星导航将进入GPS,GLONASS,GALILEO 和北斗四大全球性导航系统为主、多种增强辅助系统为补充的全球化格局,卫星系统资源的不断丰富为铁路列车定位应用提供了更为充分的发展条件。多模式导航系统提供信息源保障改变了传统依赖于单一卫星导航模式的贫信号、弱信号限制。这一目标的实现有赖于在列车定位中有效实现多模式卫星导航系统兼容。可以预见,列车定位专用卫星导航接收机的兼容性优化和相关技术壁垒的突破,是卫星导航在铁路系统发展应用进程下的必然选择。
2) 多信息源的高耦合度融合。目前卫星导航用于列车定位的多源数据融合中,基于松耦合结构的融合方案仍占主要地位,无法摆脱对信息源表征能力挖掘的局限性。随着多传感器数据融合技术的不断发展和成熟,通过更为紧密的耦合态势将多种可用资源及轨道电子地图集成为统一整体,使融合估计与传感器自身处理过程一体化结合,将极有助于实现更高集成化的融合能力,有效消除卫星导航在信号全遮蔽、强干扰环境下面临的困境,适度降低完好性监测、地图辅助校正等策略的复杂性,从而在一定程度上缓解列车定位需求对传感器本身的选择限制,使低成本列车定位走向实际应用成为可能。
3) 位置应用的自主特性拓展。自主性是列车定位采用卫星导航的主要原因与鲜明特色,如何利用卫星导航系统优势提高列车定位及其应用系统的自主性是重要发展目标,它包含2 方面内涵:其一,北斗导航系统引入列车定位能极大提升卫星导航的资源自主性,对列车定位的众多安全相关应用具有重大战略意义;其二,基于卫星导航的列车位置应用能够有效解除对地面设备的依赖,相较于铁路现有方式在建设、维护等方面具有十分明显的附加成本优势。此外,在虚拟应答器的基础上进一步拓展对既有模式功能的虚拟化和兼容性,将对促进列车定位及其应用的自主化、实用化具有积极推动作用。
4) 应用安全性的规范化统一。随着北斗二代系统在铁路系统中应用进程的加快,如何针对性地开发安全参考标准对卫星导航应用效能进行合理定义与规范,是从研究探索层面落实到应用过程的必要途径。这一目标的实现需要充分利用先进技术手段并结合已有基础,提出适合于我国铁路路情以及北斗卫星导航系统阶段特性的合理方案。在相应应用系统的设计、开发、测试、评估、验证、确认等生命周期全过程,有待于形成统一化规范,构建有效的测试参考平台,优化理论方法,这将从安全这一铁路系统核心目标出发实现整个体系的完善,也将为卫星导航系统在其他相关领域形成参考价值。
5 结语
1) 对基于卫星导航系统的列车定位技术的研究进展及现状进行了系统性总结。卫星导航作为重要的战略资源,与铁路运输系统的位置服务应用需求具有明显切合度和强劲的发展潜力。
2) 铁路系统现代化进程以及北斗卫星导航系统快速发展的双重动力,促使这一领域的研究、开发与应用工作将在未来时期得到快速发展,与世界多极并存的卫星导航系统资源构成开放、兼容的多元格局,形成自主化竞争力。
3) 良好的外部环境以及迫切的内在发展需求需要进行持续的创新和突破,以加速我国北斗二代卫星导航系统步入全球卫星导航事业引领地位,同时在应用融合中推动我国铁路运输体系核心竞争力的进一步提升和巩固。
[1] Filip A, Bazant L, Mocek H, et al. Dynamic properties of GNSS/INS based train position locator for signalling applications[C]// Proceeding of 8th International Conference on Computer System Design and Operation in the Railway and Other Transit Systems, Southampton: WIT Press, 2002:1021-1030.
[2] Hegarty C,Chatre E. Evolution of the global navigation satellite system (GNSS)[J]. Proceedings of the IEEE, 2008, 96(12):1902-1917.
[3] Filip A, Beugin J, Marais J, et al. Safety concept of railway signalling based on Galileo safety-of-life service[C]//Proceedings of 11th International Conference on Computer System Design and Operation in the Railway and Other Transit Systems,Southampton:WIT Press,2008:103-112.
[4] Craven P. A brief look at railroad communication vulnerabilities[C]// Proceedings of 7th International IEEE Conference on Intelligent Transportation Systems, Piscataway:IEEE,2004:245-249.
[5] Federal Railroad Administration. The North American joint positive train control (NAJPTC) project[EB/OL]. [2009-04-05].http://www.fra.dot.gov/downloads/Research/rr0905.pdf.
[6] Federal Railroad Administration. Alaska railroad collision avoidance system (CAS) project[EB/OL]. [2009-08-16].http://www.fra.dot.gov/downloads/research/rr0916.pdf.
[7] Filip A, Mocek H, Bazant L. GPS/GNSS based train positioning for safety critical applications[J]. Signal and Draht, 2001, 93(5):51-55.
[8] Urech A. Galileo demonstrator for railway operation system -project overview[R]. Madrid: European Commission,Directorate General Energy and Transport,2002:1-4.
[9] Bedrich S, Gu X. GNSS-based sensor fusion for safety-critical applications in rail traffic[EB/OL]. [2009-01-02]. http://www.galileo-services.org/library/2.1-Bedrich.pdf.
[10] Simsky A, Wilms F, Franckart J. GNSS-based failsafe train positioning system for low-density traffic lines based on one-dimensional positioning algorithm[C]// Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies. Noordwijk: European Space Agency,2004:1-8.
[11] Albanese A, Marradi L. The RUNE project: the integrity performances of GNSS-based railway user navigation equipment[C]// Proceedings of 2005 ASME/IEEE Joint Rail Conference,Piscataway:IEEE,2005:211-221.
[12] Jenkins B, Urech A, Prieto M. GNSS introduction in the rail sector[C]// Proceedings of IET Seminar on Global Navigation Satellite Systems. Stevenage: Institution of Engineering and Technology,2007:143-155.
[13] Thevenot V, Bruckmueller T, Doederlein C, et al. ECORAIL: A step towards safe railway controlling systems based on satellite positioning[C]// Proceedings of the 2003 European Navigation Conference. Graz: European Group of Institutes of Navigation,2003:1-18.
[14] Becker U, Hansel F, May J, et al. Concept of vehicle autonomous localisation for railway application[C]// Proceedings of 6th International Conference on ITS Telecommunications.Piscataway:IEEE,2006:326-330.
[15] Lehner A, Muller F, Strang T, et al. Reliable vehicle-autarkic collision detection for rail-bound transportation[C]// Proceedings of 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services. Brussels: Intelligent Transportation Systems and Services for Europe,2009:1-8.
[16] Zorin V. Satellite technologies for railway traffic control[J]. The RZD-Partner International China,2008,1(3):30-31.
[17] 徐程龙, 田秀臣, 韩赞东, 等. 基于GPS 的CIR 卫星定位单元设计[J]. 铁道通信信号,2012,49(5):65-68.XU Chenglong, TIAN Xiucheng, HAN Zandong, et al. Design of GPS-based CIR satellite positioning module[J]. Railway Signalling&Communication,2012,49(5):65-68.
[18] 王剑. 基于GNSS 的列车定位方法研究[D]. 北京: 北京交通大学电子信息工程学院,2007:3-16.WANG Jian. Research of the train positioning technologies based on GNSS technology[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2007:3-16.
[19] Filip A, Bazant L, Mocek H, et al. Satellite navigation based railway signalling concept[C]// Proceedings of International conference of COMITE.Prague:European GNSS Agency,2001:1-20.
[20] Marais J, Berbineau M, Heddebaut M. Land mobile GNSS availability and multipath evaluation tool[J]. IEEE Transactions on Vehicular Technology,2005,54(5):1697-1704.
[21] Polivka A, Filip A. Satellite-based positioning for CBTC[C]//Proceedings of 2nd International Conference on Reliability,Safety and Diagnostics of Transport Structures and Means.Pardubice:University of Pardubice,2005:293-300.
[22] Wiss J, Barbu G, Frosig P, et al. Requirements of rail applications[EB/OL]. [2000-05-01]. http://etcs.uic.asso.fr/docs/specifications/etcs_lc_satellite.pdf.
[23] Bertran E, Delgado-Penin J. On the use of GPS receivers in railway environments[J]. IEEE Transactions on Vehicular Technology,2004,53(5):1452-1460.
[24] 梁前浩.GPS 中频信号仿真与微弱信号捕获、跟踪方法研究[D]. 北京: 北京交通大学电子信息工程学院,2008:36-43.LIANG Qianhao. Study on GPS IF signal simulation and weak signal acquisition, tracking algorithm[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2008:36-43.
[25] 安毅. 一种基于卫星定位的列车完好性检查方法研究[D]. 北京: 北京交通大学电子信息工程学院,2008:24-32.AN Yi. Research of train integrity monitoring method based on GPS[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2008:24-32.
[26] Marradi L, Foglia L, Franzoni G, et al. Girasole receiver development for safety of life applications[J]. Signals and Communication Technology,2008,2:313-327.
[27] Poliak P, Marais J, Hansel F, et al. Methods and tools for the certificationof GALILEOlocalisationfor railway applications[C]// Proceedings of 8th World Congress on Railways Research.Paris:International Union of Railways,2008:1-8.
[28] Geistler A. Robust velocity measurement for railway applications by fusing eddy current sensor signals[C]// IEEE Intelligent Vehicles Symposium, Piscataway: IEEE, 2004:664-669.
[29] 郭保青, 朱力强, 史红梅, 等. 基于单幅图像的轨检车位置校正方法研究[J]. 铁道学报,2011,33(12):72-77.GUO Baoqing, ZHU Liqiang, SHI Hongmei, et al. Research on track inspection car position correction method by use of single image[J]. Journal of the China Railway Society, 2011, 33(12):72-77.
[30] Chen Z.Bayesian filtering:From Kalman filters to particle filters,and beyond[J].Statistics,2003,182(1):1-69.
[31] 张献州.GPS/INS 组合列车实时定位信息融合方案研究[C]//中国测绘学会第七次全国会员代表大会. 北京, 2001:494-499.ZHANG Xianzhou.Research on the real-time information fusion strategy for GPS/INS integrated train positioning[C]//Proceedings of 7th National Congress of Chinese Society for Geodesy Phatogrammetry Cartography.Beijing,2001:494-499.
[32] 高社生, 桑春萌, 李伟. 改进的粒子滤波在列车组合定位系统中的应用[J]. 中国惯性技术学报,2009,17(6):701-705.GAO Shesheng, SANG Chunmeng, LI Wei. Application of improved particle filter to integrated train positioning system[J].Journal of Chinese Inertial Technology,2009,17(6):701-705.
[33] 刘江, 蔡伯根, 唐涛, 等. 基于CKF 的GNSS/INS 列车组合定位鲁棒滤波算法[J]. 交通运输工程学报,2010,10(5):102-107.LIU Jiang, CAI Baigen, TANG Tao, et al. CKF-based robust filtering algorithm for GNSS/INS integrated train positioning[J].Journal of Traffic and Transportation Engineering, 2010, 10(5):102-107.
[34] Chen D, Fu Y, Cai B, et al. Modeling and algorithms of GPS data reduction for the Qinghai-Tibet railway[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):753-758.
[35] 刘江, 蔡伯根, 唐涛, 等. 基于GPS 的列控轨道地图数据生成方法研究[J]. 测绘学报,2011,40(1):111-117.LIU Jiang, CAI Baigen, TANG Tao, et al. Research on GPS based track map data generation method for train control[J].ACTA Geodaetica et Cartographica Sinica, 2011, 40(1):111-117.
[36] 丁克良, 刘大杰, 周全基. 既有铁路曲线整正平差算法[J]. 测绘学报,2004,33(3):195-199.DING Keliang,LIU Dajie,ZHOU Quanji.Adjustment algorithm for realignment of the existing railway curve[J]. ACTA Geodaetica et Cartographica Sinica,2004,33(3):195-199.
[37] Chen D, Tang T, Cao F, et al. An integrated error-detecting method based on expert knowledge for GPS data points measured in Qinghai-Tibet railway[J]. Expert Systems with Applications,2011,39:2220-2226.
[38] Gerlach K,Horste M.A precise digital map for GALILEO based train positioning systems[C]// Proceedings of 9th International ConferenceonIntelligentTransportSystems Telecommunications, Piscataway:IEEE,2009:343-347.
[39] Jiang Z. Digital route model aided integrated satellite navigation and low-cost inertial sensors for high-performance positioning on the railways[D]. London: University College London.Department of Civil, Environmental and Geomatic Engineering,2010:158-168.
[40] 王剑, 张辉, 蔡伯根, 等. 基于HMM 的列车轨道占用自动识别算法研究[J]. 铁道学报,2009,31(3):54-58.WANG Jian, ZHANG Hui, CAI Baigen, et al. The algorithm of automatic track occupying identification based on HMM[J].Journal of the China Railway Society,2009,31(3):54-58.
[41] 蔡伯根, 严细辉, 王剑, 等. 列车轨道占用自动识别算法[J].交通运输工程学报,2010,10(6):111-126.CAI Baigen, YAN Xihui, WANG Jian, et al. Automatic identification algorithm of train track occupancy[J]. Journal of Traffic and Transportation Engineering,2010,10(6):111-126.
[42] Zheng Y, Cross P. Integrated GNSS with different accuracy of track database for safety-critical railway control system[J]. GPS Solutions,2012,16(2):169-179.
[43] 李翀. 数字轨道地图辅助的列车定位方法研究[D]. 北京: 北京交通大学电子信息工程学院,2008:35-43.LI Chong. Research on train positioning method aided by track digital map[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2008:35-43.
[44] Barbu G. Virtual Balise functional requirement specification[R].Utrecht:European Rail Research Institute(ERRI),2002:10-16.
[45] Garcia M. On-board location subsystem requirement specification[R]. Madrid: Galileo Demonstrator for Railway Operation System(GADEROS),2003:13-22.
[46] 张雅静, 王剑, 蔡伯根. 基于GNSS 的虚拟应答器研究[J]. 铁道学报,2008,30(1):104-108.ZHANG Yajing, WANG Jian, CAI Baigen. Research of virtual Balise based on GNSS[J]. Journal of the China Railway Society,2008,30(1):104-108.
[47] 刘江. 基于鲁棒估计理论的列车组合定位方法研究[D]. 北京:北京交通大学电子信息工程学院,2011:16-20.LIU Jiang. Research on robust estimation theory based train integrated positioning method[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2011:16-20.
[48] Filip A, Maixner V, Mocek H, et al. Fault diagnosis in high integrity GNSS based train position locator[C]// Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies. Noordwijk: European Space Agency,2004:1-8.
[49] Mirabadi A, Mort N, Schmid F. Fault detection and isolation in multi-sensor train navigation systems[C]// Proceedings of UKACC International Conference on Control,Piscataway:IEEE,1998:969-974.
[50] 张峰. 列车组合定位系统故障检测与隔离算法的研究[D]. 北京: 北京交通大学电子信息工程学院,2007:19-27.ZHANG Feng. Research on fault detection and isolation of integrated train positioning system[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2007:19-27.
[51] Liu J, Cai B, Tang T, et al. A PCA based fault detection and isolation method for train locating system[C]// Proceedings of International Conference on Information Technology for Manufacturing Systems, Clausthal-Zellerfeld: Trans Tech Publications,2010:688-693.
[52] Filip A, Taufer J, Mocek H, et al. The high integrity GNSS/INS based train position locator[C]// Proceedings of 9th International Conference on Computer Aided Design, Manufacture and Operation in the Railway and Other Advanced Transit Systems,Southampton:WIT Press,2004:497-506.
[53] 唐一哲. 基于GNSS 的列车定位完善性研究[D]. 北京: 北京交通大学电子信息工程学院,2007:34-39.TANG Yizhe. Research in GNSS based train positioning integrity[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering,2007:34-39.
[54] Liu J, Tang T, Cai B, et al. Integrity assurance of GNSS-based train integrated positioning system[J]. Science China Technological Sciences,2011,54(7):1779-1792.
[55] Jana H. GNSS train position integrity monitoring by the help of discrete PIM algorithms[J]. Journal of Applied Mathematics,2009,2(3):73-80.
[56] Zheng Y. Improving positioning accuracy and integrity in rail safety-critical applications through the integration of GNSS with a track data base[C]// Proceedings of 20th ION GNSS International Technical Meeting of the Satellite Division, Red Hook:Curran Associates Inc.,2007:1456-1465.
[57] Horste M, Ptok B, Schnieder E, et al. A case study for the automated system development: the satellite-based train control system[C]// Proceedings of IFAC Conference on Control Systems Design.Kidlington:Elsevier Science,2000:329-334.
[58] Hansel F, Poliak J, Schnieder E, et al. Framework for certification of GALILEO for railway applications[EB/OL].[2006-01-26].http://www.railway-research.org/IMG/pdf/298.pdf.
[59] Mocek H, Filip A, Bazant L. Verification of quantitative requirements for GNSS-based railway applications[C]//Proceedings of 12th International Conference on Computer System Design and Operation in Railways and Other Transit Systems.Southampton:WIT Press,2010:711-722.
[60] Beugin J,Filip A,Marais J, et al.Galileo for railway operations:question about the positioning performances analogy with the RAMS requirements allocated to safety applications[J].European Transport Research Review,2010,2(2):93-102.
[61] Beugin J,Marais J.Simulation-based evaluation of dependability and safety properties of satellite technologies for railway localization[J].Transportation Research Part C,2012,22:42-57.
[62] Hartwig K, Grimm M, Horste M, et al. Requirements for safety relevant positioning applications in rail traffic: A demonstrator for a train borne navigation platform called “DemoOrt”[EB/OL].[2003-12-12].http://elib.dlr.de/21252/1/wcrr.pdf.
[63] Poliak J, Beisel D, Becker U, et al. Satellite based localisation system for secondary railway lines[J]. Mechanics Transport Communications,2007,3:11-16.
