凝视观测图像空间弱小目标检测方法
2014-03-27王鲲鹏马超伟王东亚
王鲲鹏 ,马超伟,2,侯 旺,王东亚
(1.北京跟踪与通信技术研究所,北京 100094;2.北京理工大学信息与电子学院,北京 100081;3.国防科技大学航天科学与工程学院,湖南 长沙 410073)
引言
凝视观测是空间目标监视常采用的一种观测模式,光学望远镜始终对准恒星目标,图像中恒星目标位置基本保持不变,则图像中运动目标即为待检测目标。由于观测系统视场大,卫星、碎片等空间目标在图像中的成像尺寸往往较小,且其信号强度较弱,细节特征基本缺失,易受月光、天光、薄云、大气湍流等气候条件和高亮目标拖尾等因素的影响,目标检测难度较大[1-2]。当前,弱小目标检测方法可以大致分成两类:跟踪前检测(detect before track-DBT)和检测前跟踪(track before detect-TBD)两大类。DBT方法[3-5]对每帧图像都作出目标存在与否的判断,随后目标跟踪算法将观测结果与目标轨迹进行关联,作出相应判决。常见的方法包括空域背景预测方法、熵方法、图像分割方法、马尔科夫随机场正则化方法和小波变换方法等,这些方法主要是利用目标图像的空间特性来检测小目标,忽略了目标和背景杂波的时间特性;TBD方法[6-8]将空间和时间信息融入多帧图像处理过程中,在三维图像空间中对所有可能轨迹进行跟踪,若某条轨迹的后验概率函数值超过某一门限,则认为该条轨迹代表一个目标。常见的方法包括管道滤波、多假设检验、动态规划、贝叶斯滤波、三维匹配滤波和时域滤波等方法,较适合低信噪比(如弱小目标淹没在复杂背景或噪声)条件下的目标检测问题,但计算量往往较大。本文提出了一种多帧频域特征累积的弱小目标检测方法,充分利用了空间目标图像的成像特点及运动规律,通过频域空间的特征累积快捷地获得了空域中灰度累积的效果,消除了恒星目标和噪声的影响,利用仿真图像和实际图像验证了算法的有效性。
1 基本原理
通常情况下,空间目标图像可表示为3个组成部分——目标、背景和噪声:
y(r,t)=s(r,t)+b(r,t)+m(r,t)
(1)
式中:y(r,t)是t时刻图像中像素r处的灰度值;s(r,t)、b(r,t)和m(r,t)分别表示该像素位置处目标灰度值、背景灰度值和噪声灰度值。
在凝视观测模式下,空间目标图像背景相对简单,恒星目标基本保持静止,图像中的噪声可近似表示为均值为零的白噪声。为消除恒星目标及背景变化对图像的影响,可先对前后帧图像进行配准,再采用临帧差分方法减除背景。经去背景处理后,(1)式可表示为
y(r,t)=s(r,t)+m(r,t)
(2)
若目标在图像上的运动已知,则可将图像对应像素累积,削弱噪声对图像的影响,同时提高目标灰度值,即增大图像信噪比。如图1所示,以3帧图像的特征累积为例,若已知目标的运动速度,则可将3幅图像对应像素灰度累加,获得增强后的多帧累积图像,进而检测出目标位置。

图1 目标图像特征累积检测原理Fig.1 Principle of object detection by feature accumulation
考虑到目标在图像空间中的平移对应于频域空间中的相位变化,可利用图像的二维傅里叶变换方便地描述目标运动情况,通过多幅图像在频域上的特征叠加,获得多帧累积图像的频域描述,进而由逆傅里叶变换获得图像空间的灰度累积结果。
2 具体步骤
2.1 背景消除
凝视观测模式下,由于成像设备本身的限制以及其他一些随机因素的影响,使得视场出现小幅变化,为提高目标检测精度,可利用配准算法匹配相邻两帧中的特征点,降低恒星目标运动对检测结果的影响。考虑到恒星目标在图像中较为显著,可利用恒星目标作为特征点进行图像配准。
选取高斯函数为成像系统的扩展函数,则恒星目标成像模型可描述为二维高斯分布[9]:
(3)
式中σ表示目标的灰度分布方差。图2描述了目标成像模型三维分布及实际恒星目标图像,其中左图为目标成像灰度的三维分布,右图为放大后的实际目标图像。

图2 目标成像模型及实际图像Fig.2 Model of target imaging and real image
由此可通过二值化方法快速定位图中明显的恒星目标[10],根据目标成像模型设计光团目标检测模板,匹配相邻帧中的恒星目标。由于恒星目标在相邻两帧图像中位置基本不变,在下一帧图像目标检测时,恒星目标搜索范围可局限在前帧图像检测结果附近。获得相邻两帧图像中对应恒星目标的精确位置后,可根据图像变换方程配准前后帧图像。在图像配准的基础上,可利用相邻帧差法消除背景变化,二值差图像D(x,y)表示:

(4)
式中:T是阈值;帧f(x,y,k-1)与帧f(x,y,k)为相邻两帧图像,由于目标灰度高于背景灰度,这里仅考虑差值大于零的情况,对应于第k帧的运动目标。
2.2 频域累积检测
对于背景消除后的序列图像,令s0(r)为初始时刻的目标灰度函数,假设图像中目标为匀速直线运动,速度为v,则t时刻目标的灰度可表示为
s(r,t)=s0(r-vt)
(5)
设序列图像的帧间隔时间为t0,利用(2)式和(5)式,nt0时刻图像可表示为
y(r,nt0)=s0(r-vnt0)+m(r,nt0)
(6)
式中n=0,1,…,N,表示图像帧序号,则该时刻图像的二维傅里叶变换可表示为
F{y(r,nt0)}=Y(k,nt0)=S0(k)exp{-ik·
vnt0}+M(k,nt0)
(7)
k表示频域空间的二维矢量,令Yn(k)=Y(k,nt0),Mn(k)=M(k,nt0),a=exp(-ik·vt0),参数a表示目标平移反应在频域中的相位变化,则(7)式可表示为
Yn(k)=S0(k)an+Mn(k)
(8)
令X(k)为频域累积特征,则对于单帧图像而言,X0(k)=Y0(k);对于两帧图像,目标在空域上的平移对应频域中相位的变化,可使第二幅图像对应频域空间的相位变化a后,再与第一幅图像对应的频域空间叠加,即:
X1(k)=Y1(k)+aY0k=Y1(k)+aX0(k)
(9)
同理,可得三帧图像的频域特征累积结果:
X2(k)=Y1(k)+a[Y1(k)+aY0(k)]=
Y2(k)+aX1(k)
(10)
由此可推导出n帧图像的频域特征累积结果为
Xn(k)=Yn(k)+aXn-1(k)
(11)
由(7)式与(11)式可得:
ajMN-j(k)]
(12)
由于图像中加性白噪声的均值为0,上式的期望可表示为
E{XN(k)}=(N+1)S0(k)exp{-ik·vNt0}
(13)
根据上式,可得到不同速度条件下的频域累积值,然后通过逆傅里叶变换即可获得图像空间中目标灰度的累加值,若累加值大于一定阈值即可认为是检测出目标,则第N幅图像中的目标检测结果可表示为
设s为目标平均灰度,m为背景的平均灰度值,σ为背景方差,则图像信噪比可表示为
(15)
频域特征累积的效果将使目标的平均灰度增大N+1倍,凝视观测模式下的空间目标图像,其背景平均灰度可近似认为0,且背景灰度的方差基本保持不变,显然图像信噪比将增大N+1倍。当N增大时,白噪声对频域特征累积的影响逐渐减小,目标被明显增强。
2.3 算法流程
算法流程图如图3所示,针对选定的序列图像,根据目标运动特点,预先设定速度搜索范围,经过去背景处理和FFT变换后,按照频域特征累积方法计算XN(k),由逆FFT变换获得空间域灰度累积图像,若存在某像素点处的累积值大于设定阈值Rth,则记录下本次检测结果,若不满足条件,则改变设定速度,重复上述过程,直至所有速度搜索域遍历完成,输出所有检测结果。

图3 算法流程图Fig.3 Flow chart of algorithm
3 实验分析
3.1 仿真实验
构造一组弱小目标运动的仿真序列图像,图像尺寸为51像素×51像素,目标灰度分布为高斯形式,方差为2,高斯分布峰值灰度为128,目标在图像中运动方程为

(16)
图4(a)为第15帧目标图像,向每幅序列图像添加均值为0、灰度方差为70的高斯噪声,添加噪声后的仿真图像如图4(b)所示,目标所在位置以方框进行标示,从中可以看出,目标几乎完全被淹没在噪声中。
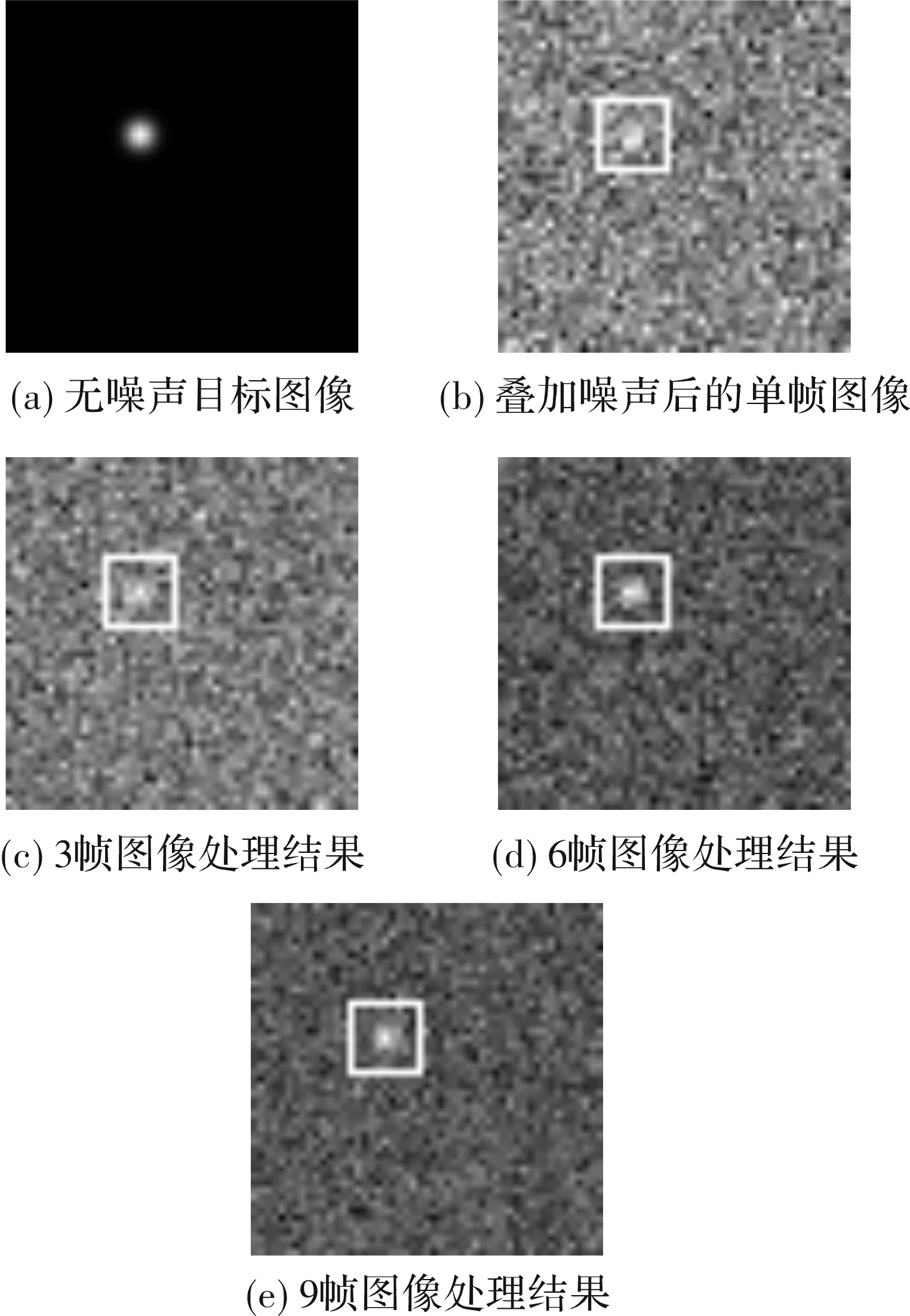
图4 仿真序列图像检测结果Fig.4 Object detection results of simulation images
采用本文方法,分别利用3帧、6帧和9帧图像进行处理,经FFT反变换后的图像分别如图4(c)、图4(d)、图4(e)所示,检测出的目标位置如图中方框所示。对第15帧图像进行处理,原图中目标信噪比为SNR0=0.54,表1描述了利用3帧、6帧、9帧图像分别进行处理后的目标信噪比及前后信噪比的比值。从中可以看出,随着累积图像帧数的增加,目标越来越明显,信噪比明显提高。
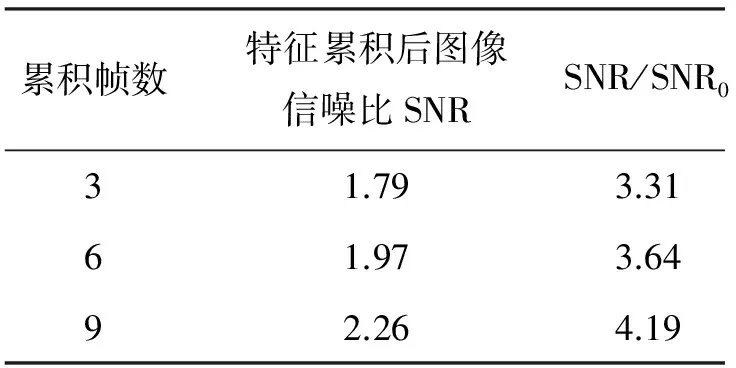
表1 累积帧数对目标信噪比的影响Table 1 Influence of frame number on SNR
3.2 实际图像检测结果
针对实际凝视观测图像,利用5帧图像的频域特征进行累积检测,其中2帧图像的检测结果如图5所示,图中检测出2个空间目标,其位置用图中十字丝表示。由于原始图像尺寸较大,为便于显示,这里对原始图像进行了裁剪,并在图像右下角给出了该目标区域的放大图像。从中可以看出,本文方法能够较好地检测出弱小运动目标。

图5 实际凝视观测目标检测结果Fig.5 Object detection results of real observation images
4 结束语
本文提出了凝视观测图像的频域特征累积目标检测方法,利用傅里叶变换将目标在空域中的运动特征转换为频域中的相位变化,基于运动目标序列图像构造了递归的频域特征累积形式,便于检测算法的编程实现。图像中目标信噪比随着叠加帧数的增加而增大,有利于弱小目标检测,但同时也应考虑到更多的帧数会让模型与目标实际运动的模型不吻合,不利于目标特征的累积,应针对目标实际运动情况选择合适的叠加帧数。
[1] Huang Zongfu,Wang Weihua,Han Jiantao,et al. A real-time algorithm for weak small target detecton in astronomical opto-electronic image sequence[J].Singal Processing, 2010,26(9):1379-1384.
黄宗福,王卫华,韩建涛,等.一种天文光电图像序列弱小目标实时检测算法[J].信号处理,2010,26(9):1379-1384.
[2] Liu Qingwu, Hu Xiaohui, Yuan Lin. Real time detection for dim moving target in visible optical image of deep outer space[J]. Acta Electronica Sinica, 2009,37(7):1614-1617.
柳庆武, 虎晓惠, 袁麟. 深空可见光图像中弱小运动目标实时检测[J]. 电子学报,2009,37(7):1614-1617.
[3] Bae T, Kim Y, Ahn S,et al. An efficient two-dimensional least mean square (TDLMS) based on block statistics for small target detection[J]. J Infrared Milli Terahz Waves, 2009,30:1092-1101.
[4] He Pengfei,Su Xinyan,Wang jian. Small target detection based on image sequences[J]. Journal of Applied Optics, 2011,32(2):272-275.
贺鹏飞, 苏新彦, 王鉴. 基于序列图像的小目标检测[J].应用光学, 2011,32(2):272-275.
[5] Bae T, Sohng K. Small target detection using bilateral filter based on edge component[J]. J. Infrared Milli Terahz Waves, 2010, 31:735-743.
[6] Yao R, Zhang Y, Yang T, et al. Detection of small space target based on iterative distance classification and trajectory association[J]. Optcs and Precision Engineering, 2012,20:179-189.
[7] Reed I, Gagliardi R, Stotts L. Optical moving target detection with 3-D matched filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1988, 24(4):327-336.
[8] Zhang T, Li M, Zuo Z,et al. Moving dim point target detection with three-dimensional wide-to-exact search directional filtering[J]. Pattern Recognition Letter, 2007,28:246-253.
[9] Lindeberg T. Feature detection with automatic scale selection[J]. IJCV, 1998,21(1):144-156.
[10] Yu Qifeng, Shang Yang. Videometrics: principles and researches[M].Beijing: Science Press,2009.
于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社, 2009.