多光轴校轴仪调校关键技术研究
2014-03-27张向明张锦亮王养云赵红军刘奕辰孔龙阳
张向明,张锦亮,王养云,姜 峰,赵红军,刘奕辰,孔龙阳
(西安应用光学研究所,陕西 西安 710065)
引言
多传感器光电系统集激光测距、激光制导照射、可见光成像和红外热成像等为一体,可以在不同环境下准确探测敌方目标。这种光电系统内装备有多个传感器,传感器光轴之间的平行性决定了整个光电系统的瞄准精度,因此需要专用的多光轴校轴仪进行定期校正。目前用于光轴平行性测试的多为单一波段的测试系统,且系统较为复杂,为外场校轴带来许多不便,同时由于不同波段使用的测试系统不同,各波段光轴间的平行性测试精度会带来一定的偏差。因此这种单一波段的测试系统已经无法满足当前的使用要求,急需一种结构简单、检测精度高的多光轴平行性测试系统[1]。基于这种需要,本文提出一种光轴跨距较大的多光轴校轴仪,对校轴仪的装配关键技术进行研究,得出对激光、电视和热像三轴的检测平行精度达到10″以内。
1 多光轴校轴仪的工作原理
多光轴校轴仪的内部结构由主镜、次镜、陶瓷基靶板、照明装置、扩束棱镜组、双光楔镜组和保护玻璃等组成。如图1所示,主镜和次镜构成一个卡赛格林系统,陶瓷基靶板位于卡赛格林系统的焦面处。被测光电系统发射一束激光,激光光束经保护玻璃入射到扩束棱镜组的第1块反射镜折转90°后反射到双光楔镜组中,经双光楔镜组多次折射后入射到扩束棱镜组的第2块反射镜折转90°后入射卡赛格林系统中,经卡赛格林系统主镜第1次反射和次镜第2次反射后汇聚到陶瓷基靶板上,激光能量使靶面产生明亮的热闪光点。经卡赛格林系统次镜第1次反射和主镜第2次反射后,光点的一部分能量经红外窗口进入到热像通道,另一部分能量的出射路径与激光入射路径类似,同样经扩束棱镜组的2次反射和双光楔镜组的折射后,经保护玻璃进入到电视通道。此时在电视和热像显示屏上会显示出一个亮点,启动视频跟踪电子装置,调整电视摄像机和热像仪电子分划线的位置,使其中心与亮点中心重合,这样就可以保证激光、电视和热像3个光轴的平行性[2]。
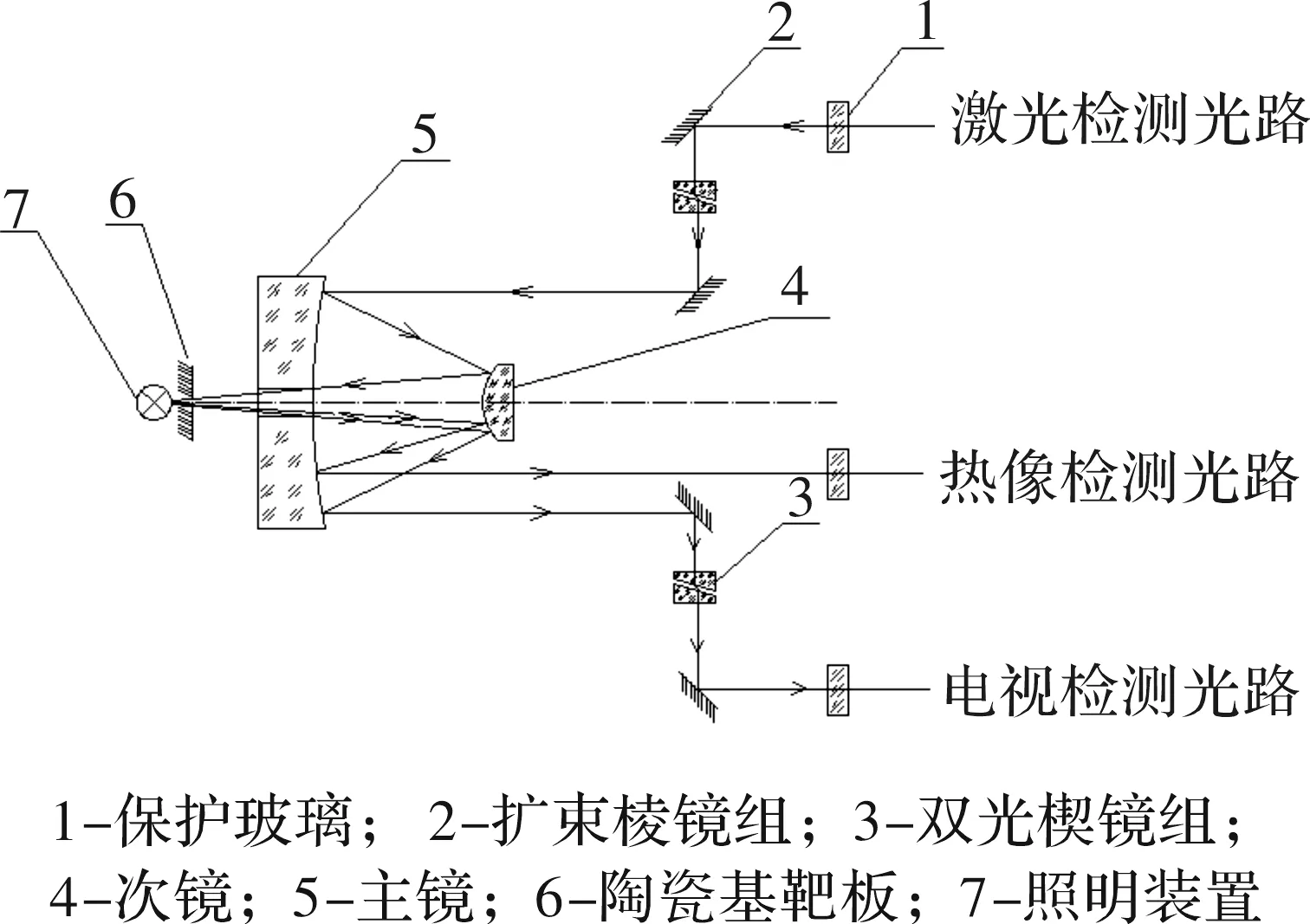
图1 多光轴校轴仪光学系统Fig.1 Optical system of multi-spectral axes calibration machine
2 影响多光轴校轴仪校准精度的因素
卡赛格林系统的主镜为抛物面,相对口径和质量较大,镜体自重会破坏主镜的面形精度,导致系统的成像光点模糊变形,无法找到光点中心位置,因此需要特殊装配方法来消除镜体自重对反射面面形的影响[3]。多光轴校轴仪对系统出射光束的平行性有着极高的要求,当陶瓷基靶板的位置与卡赛格林系统的焦面重合时,系统出射光束的平行性最好,测量光轴平行性的准确度最高。因此陶瓷基靶板的定焦精度直接影响了多光轴校轴仪的精确度。扩束棱镜组的使用,可以有效缩小主镜的口径,但是会引入各检测光路出射光轴的平行误差,需要双光楔镜组对出射光轴方向进行微调,因此各检测光路出射光轴的平行性也是影响多光轴校轴仪校准精度的关键因素之一。
3 主镜面形变化的主要原因
1) 主镜自身质量引起的变形。主镜与主镜座采用中心轴定位[4]方式进行粘接固定,主镜自重较大,如果其自身重力不能得到平均分摊,中心孔处应力过于集中,将破坏主镜的面形,影响系统的成像质量。
2) 主镜玻璃与主镜座材料热膨胀性能的差异所产生的热应力对主镜面形的影响[5]。镜体与镜座在温度变化后会产生应力,该应力对主镜面形造成破坏。
3) 主镜定光学中心,车削主镜座外圆时车削力对主镜面形的影响。卡赛格林系统在装配时需要找到主镜的光学中心。一般的方法是将主镜粘接到主镜座后,使用专用工装将其固定在车床上对主镜进行光学定中心,并按要求尺寸车削主镜座外圆,车刀的车削力经主镜座传递到主镜上,破坏镜体的面形精度,而且碎屑有时也会损伤主镜表面。
3.1 对以上主镜变形采取的措施
1) 根据主镜装配时受力情况的分析与模拟,在主镜座底面制相应的灌胶孔,使镜体自重均匀分布在各灌胶点上和中心轴处,减少主镜自重对面形的影响;
2) 固定主镜使用的硅橡胶在固化后体积收缩量很小,同时主镜座采用与主镜玻璃热膨胀系数相近的铟钢材料,可以有效减少胶斑内部产生的应力;
3) 主镜座在加工时不再留有传统光学定中心所需的车削余量,主镜座与镜筒内壁圆周面要求配合紧密,间隙在0.01 mm以内;使用装有CCD摄像机的高精度反射式定中心仪,可以观测到主镜表面的球心像,并显示在监视器上,如图2、图3所示。

图2 主镜定光学中心示意图Fig.2 Schematic diagram of primary mirror fixing optical center

图3 监视器显示的主镜球心像图Fig.3 Image for center of primary mirror showed by monitor
主镜与主镜座组装后固定在气浮转台上,旋转转台利用杠杆百分表测量镜框的端面跳动和径向跳动,通过调整气浮转台的倾斜和平移将主镜座的端面跳动和径向跳动控制在0.01 mm以内[6]。通过定中心仪找到主镜表面的球心像,转动气浮转台,监视器中显示出球心像运动轨迹所形成的椭圆线,光学回转中心轴的位置通过中心十字线显示。微调主镜在主镜座的相对位置,当球心像与中心十字线重合时,主镜光轴与主镜座回转中心轴一致,此时在主镜孔与主镜座中心轴间的缝隙中填入硅橡胶,在固化过程监测主镜的中心偏差,如有变化及时调整,待硅橡胶固化后完成主镜的光学定中心。
主镜连同主镜座倒转180°放置,在主镜座的预制灌胶孔内灌入硅橡胶,严格控制每个灌胶孔的灌胶量,保证固化胶斑体积一致,防止胶液流动到临近灌胶点处,避免胶斑收缩应力不均匀导致的主镜面形变化,同时胶层固化过程应处于温度和湿度恒定的环境,减少胶层固化过程中所产生应力。通过以上工艺方法的改进,主镜粘接完成后,使用干涉仪对其面形进行检测,如图4所示,干涉图像变化较小,符合使用要求。

图4 粘接前后主镜的面形干涉图Fig.4 Surface interference graphs of primary mirror after and before bonding
卡赛格林系统的成像质量可以通过星点法进行检测。下图5中的(a)为主镜未采用本文所述的粘接和光学定中心方法装配的卡赛格林系统所成的星点像,可以看到光点明显有拖尾现象;图5(b)采用上文所述主镜粘接和光学定中心方法后,卡赛格林系统所成的星点像光点均匀,没有拖尾现象,说明光学系统成像质量良好。
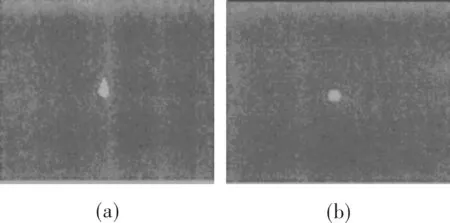
图5 卡赛格林系统所成的星点像Fig.5 Star images of Cassegrain system
4 多光轴校轴仪光学系统平行性的调校
4.1 卡赛格林系统光学平行差的调校
卡赛格林系统要求出射光束为平行光,因此陶瓷基靶板应准确定位到系统的焦面处。陶瓷基靶板中心设有直径为0.5 mm的通光孔,照明装置照射后会形成明亮的光点,用于校正卡赛格林系统出射光束的平行差。如果靶板位于焦面处,该光点所发出的光束经卡赛格林系统出射为平行光束,如果有位置偏差,出射光束将会发散或会聚,因此通过测量出射光束的平行性就能确定靶板的位置。光束的平行性可以由五棱镜法进行检测。测量设备包括前置镜、五棱镜和导轨。公式1为测量前置镜平行差角[7]的计算方法。
(1)
式中:ε′为卡赛格林系统要求的出射光束平行差角为5″;Γ为前置镜放大率,前置镜选用T3型经纬仪,该经纬仪的放大率为28倍,通过计算可知前置镜观察到的平行差角ε=140″,人眼的最小角分辨率为e=60″,能够敏感分辨前置镜内140″的平行差角,满足检测要求。
具体操作方法如下:在卡赛格林系统出射光路的垂直方向放置导轨,将五棱镜一个通光面紧靠导轨面放置,前置镜对正五棱镜的另一个通光面放置,通过前置镜观察经五棱镜反射出卡赛格林系统的光点像,沿导轨前后移动五棱镜,如果像点左右移动,说明出射光束不是平行光,此时需要沿光轴方向微调靶板位置,直至观察到的像点不再移动,此时卡赛格林系统出射光束为平行光。
4.2 各检测光路出射光轴平行性调校
多光轴校轴仪的主镜口径为Ø200 mm,即检测口径最大为Ø200 mm,而被测光电系统各传感器间跨距达到600 mm,因此需要采用扩束棱镜组将平行光束进行扩束,达到检测要求。扩束棱镜组由2块反射面互相平行的平面反射镜组成,该反射镜由H-K9L材料制成,且反射面与出射光束夹角为45°。2个反射面的平行差要求为1′,导致出射光轴出现偏斜,需要双光楔镜组对光轴进行微调。图6为双光楔组件微调光轴示意图,光线垂直光楔前表面入射后经过一系列的折射,从后表面出射产生一定的偏向角,实现在光路中转折光轴的作用[8]。激光光束为单一波段,光楔采用H-K9L玻璃制成,楔角为10′;电视探测波段较宽,经光楔折射后会产生色差,因而光楔采用H-K9L和F5两种玻璃进行消色差设计,楔角为10′。

图6 双光楔组件在光路中的示意图Fig.6 Schematic diagram of optical path for double-wedge mirrors
当楔角为α的光楔,可实现的偏向角为
δ=α(n-1)
(2)
经过计算,通过双光楔的光轴可实现大约0′~10′的偏转角度。本文中电视和激光检测光路安装双光楔镜组,调校时以热像检测光轴为基准,对另外2组出射光轴进行微调,最终达到3束出射光轴彼此平行。
校准多光轴校轴仪所用的仪器为大口径离轴抛物面反射式平行光管[9],如图7所示,窗口口径大于多光轴校轴仪测试口径。点亮多光轴校轴仪内的照明装置,将校轴仪检测方向正对平行光管的出射方向,由于校轴仪前盖板上安装的保护窗口玻璃有一定平行差,会引起出射光束的偏折,因此在校正光轴平行性时需要将前盖板安装到位。通过前盖板上加工的调试孔调整双光楔镜组,在平行光管的焦面外侧放置观察目镜进行观测,如果观察到的是3个独立的光点,说明多光轴校轴仪的3个光轴彼此不平行,微调双光楔镜组,使3个光点完全重合,此时多光轴校轴仪的光轴平行性最高。
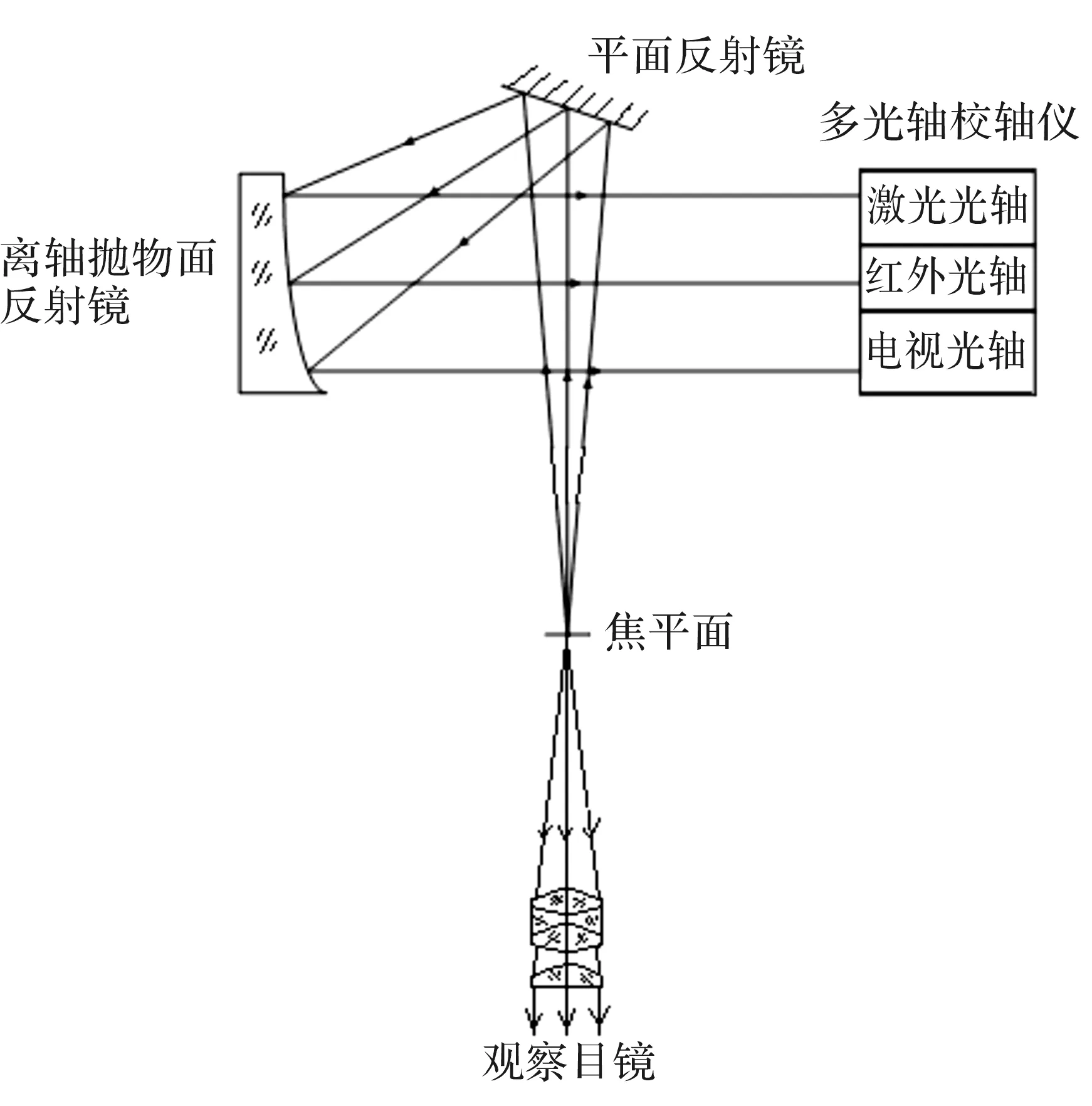
图7 多光轴校轴仪调校光轴一致性示意图Fig.7 Schematic diagram of optical axis consistency for multi-spectral axes calibration machine
4.3 调试精度分析
(3)
根据上式可得视放大率为20倍,人眼的最小角分辨率为60″,根据公式(1)得到最小分辨角ε为3″,满足多光轴校轴仪出射光轴平行差为10″的调试要求,实现光轴平行性高精度的调校。
5 调校误差分析
多光轴校轴仪调校误差来源主要为大口径离轴抛物面反射式平行光管的出射光束平行性和检测光路平行性的调校误差。
平行光管出射光束平行性通过五棱镜法进行调校,平行光管的口径D=650 mm,五棱镜口径为DP=50 mm,前置镜的放大率为Γ=28,出瞳为D′=2 mm,其调校误差[10]计算如下:
5.2×10-6
δ1= 206 265″ΔSD*D′=206 265″×5.2×
10-6×2=2.13″
计算得到调校误差为2.13″。
检测光路调校出射光轴平行性时,由于人眼对两光点对准误差为60″,通过望远系统观察的误差计算如下:
系统调校总误差计算如下:

扩展估计误差为2倍,得到系统调校总的估计误差为7.4″,小于系统检测精度10″的要求。
6 多光轴校轴仪使用效果
多光轴校轴仪通过高精度的调校,其检测精度达到10″以内,具有精度高、便携、检测速度快和测量口径大的优点。在操作时只需将检测窗口正对被测多传感器光电系统的探测窗口,控制被测光电系统的激光器发射一束激光脉冲,激光进入多光轴校轴仪后,在陶瓷基靶板上形成一个均匀的热闪光点,通过观察在红外和电视监视器中光点的位置,调整分划十字线的横纵坐标使其中心与光点中心重合,就可以完成对多传感器光电系统的校轴过程。图8和图9分别为红外和电视监视器中热闪光点的图像。
图8 红外监视器图像Fig.8 Image of infrared monitor

图9 电视监视器图像Fig.9 Image of TV monitor
7 结论
多光轴校轴仪通过主镜粘接和光学定中心方法的改进,达到了检测所需像质要求;热闪光点小而均匀,便于确定光点的中心位置,提高了对准精度;五棱镜法调校卡赛格林系统出射光束平行性,使出射光束平行差达到5″以内;大口径离轴反射式平行光管对红外、激光和电视3个检测光轴平行性进行调校,其光轴平行差可达10″以内。多光轴校轴仪能够很好地满足多传感器光电系统在各种环境下调校光轴平行性的精度要求。
[1] Chen Wenjian,Zheng Baozhong,Yang Jianli.Auto-collimating technique of multispectral and multibeam axes[J].Journal of Applied Optics, 2004,25(1):60-64.
陈文建,郑宝忠,杨建莉.多光谱多光轴自动校准技术[J].应用光学,2004,25(1):60-64.
[2] Han Juan,Duan Jiayou,Zhang Jun.Alignment method for large aperture aspheric mirror[J].Journal of Applied Optics, 2012,33(3):490-495.
韩娟,段嘉友,张钧.大口径非平面主反射镜的装调方法研究[J].应用光学,2012,33(3):490-495.
[3] Li Xiaoyan,Fu Xing,Wang Peng, et al.Alignment method of aspheric optical reflector[J].Journal of Applied Optics, 2013,34(3):498-502.
李小燕,付兴,王鹏,等.非球面光学反射镜的装调方法[J].应用光学,2013,34(3):498-502.
[4] You Rui,Wang Jing,Wang Wenge, et al.Adjustment and error analysis of the large mirror of test system[J].Journal of Changchun University of Science and Technology:Natural Science Edition, 2008,9,31(3):20-23.
尤锐,王晶,王文革,等.大口径测量系统主反射镜装调及精度分析[J].长春理工大学学报:自然科学版,2008,31(3):20-23.
[5] Duan Zhijiao.Calibration and measurement of afocal telescope consisting of lense with short focal length and small aperture[J]. Optical Ship,2004,40(2):32-33.
段志姣.由小焦距小口径透镜组成的远焦系统望远镜的检测[J].舰船光学,2004,40(2):32-33.
[6] Ma Shibang,Yang Hong,YANG Zhaojin,et al.Mutil-spectral axes parallelism calibration of eletro-optical system[J].Journal of Applied Optics, 2011,32(5):917-921.
马世帮,杨红,杨照金,等.光电系统多光轴平行性校准方法的研究[J].应用光学,2011,32(5):917-921.
[7] Zhu Heling.Optical system design about testing optical axis parallelism of multi-axial system[D].Changchun: Changchun University of Science and Technology,2009.
朱贺玲.多光轴轴线检测光学系统设计[D].长春:长春理工大学,2009.
[8] Ye Lu,Shen Xiangheng,Liu Zexun.Boresight between laser rangefinder and IR sensor[J]. Journal of Applied Optics, 2007,28(6):760-761.
叶露,沈湘衡,刘则询.强激光与红外光学系统光轴平行性检测方法的讨论[J].应用光学,2007,28(6):760-761.
[9] Wang Gang,Cheng Gang,Li Gangliang,et al.Optical axics detection instrument for shipborne photoelectrical devices[J]. Journal of Applied Optics,2010,31(1):91-94.
王刚,程刚,李广良,等.一种舰船光电装备光轴检测仪[J].应用光学,2010,31(1):91-94.
[10] Xu Zhaodong, An Shifu,Liu Xin.Methods for testing sight-axics consistency of multi-sensor photoelectric system[J].Acta Photonica Sinica, 2007,36(11):2121-2123.
许照东,安世甫,刘欣.多传感器光电系统视轴一致性测试方法研究[J].光子学报,2007,36(11):2121-2123.
