测点高度对道路交通噪声监测数据的影响
2014-03-27魏峻山张守斌刘砚华
汪 贇,魏峻山,张守斌,刘砚华
中国环境监测总站 国家环境保护监测质量控制重点实验室,北京 100012
道路交通噪声是城市中的主要噪声源,根据美国的调查显示,46%的城市人口受到噪声的困扰,其中86%的人指出噪声主要来自汽车[1]。在中国城市道路交通噪声普查式监测已经开展了近30年,由各城市的环保部门在每年春季或秋季进行。按城市规模不同监测点位数量可为几十至几百个,按监测点位所代表的道路长度加权得到城市道路交通噪声的平均值[2]。在此类监测中,监测点位高度是选在距离地面1.2 m处。采用这个高度是因为目前主要是人工监测,此高度在手工监测时较为方便。但是,在1.2 m测量容易受到往来行人活动和交谈的干扰,并受到道路两侧绿化带衰减、地面反射等影响。随着监测技术的发展,自动化水平的提高,中国噪声监测已由人工监测为主向自动监测[3-5]为主的方向转变,对自动监测而言,从仪器运行、仪器安全、仪器维护等角度,也需要提升监测点位高度。欧盟的噪声指标标准中规定,户外噪声监测高度宜离地面4 m以上,比传统的1.2 m能更好反映户外噪声水平[6-7]。中国近年对自动监测点位布设的探讨中,也采用了点位高度在4 m以上的做法[7-8]。
然而,点位高度上移会使测量结果随之改变,这造成了与传统监测数据不连续和与相关标准[2]评价值不匹配。该文首次系统研究了道路交通噪声监测点位高度改变对测量结果的影响,通过在4城市多道路开展试验,分析了噪声测量值的变化规律并探讨了监测高度提高的优点。
1 道路交通噪声测点高度试验
为了使试验具有广泛代表性,在北京、天津、上海、沈阳4个城市,共选择了132条城市道路进行监测,包括不同车道数、车流量及道路类型,道路具体信息列在表1中。
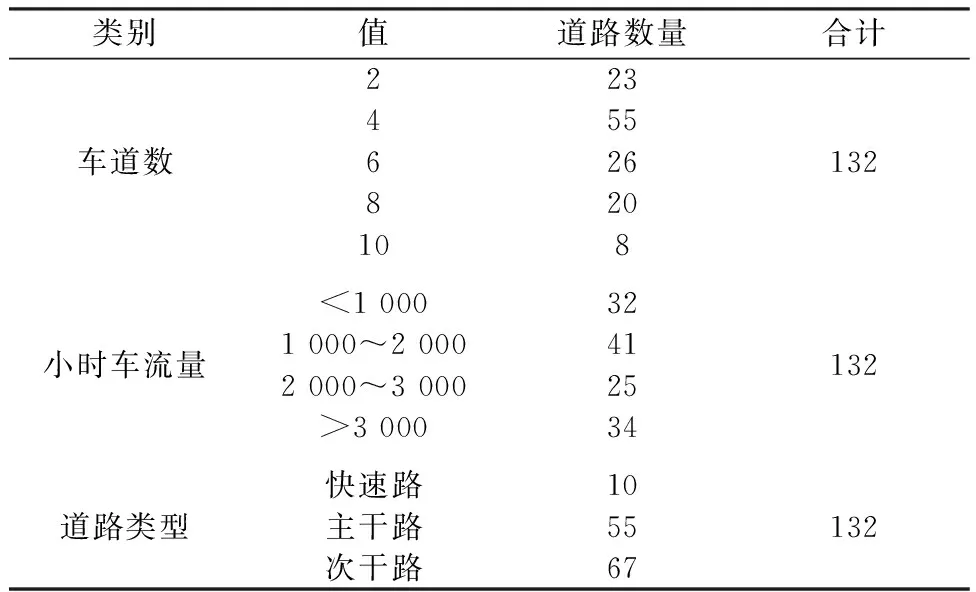
表1 道路基础信息表
试验中使用的监测仪器是AWA 6228和AWA 6291型声级计,精度等级为1级。测量量为20 min等效声级,测量时同步记录了大型车/小型车流量及路况信息。
试验中测点高度分别设在1.2、4.5 m,均符合《环境噪声监测技术规范 城市声环境常规监测》(HJ 640—2012)中对道路交通噪声点位高度的要求。1.2 m是传统手工监测高度,监测时使用三角架固定声级计。4.5 m代表了自动监测点位高度,按照《环境噪声自动监测系统技术要求(暂行)》中推荐的传声器高度(4~6 m)布设。在4.5 m监测时使用延长杆和延长线,将传声器架设到高处测量。为在试验中避开其他因素的干扰,两个高度同时在同一测点位置测量。
测点位置分两种情况布设:多数布设在机动车道外20 cm处,此类占监测道路总数的60%(图1a)。另有部分道路的机动车道紧邻非机动车道或应急车道,出于人员和仪器的安全考虑只能把点位布设在最外侧车道外,因此与机动车道最近边界的水平距离有2~8 m(图1b)。由于机动车是道路交通噪声的主要声源,测点与机动车道的距离是影响噪声值的重要因素之一,分别记录不同水平距离的测量值以便后续分析。所有测点都布设在绿化带前,与道路间无任何遮挡。
2 结果与分析
试验中,测得1.2 、4.5 m高度道路交通噪声值共132组。由于主要研究的是两高度测量值的差别,因此以下均使用两者的差值进行分析。按车道数、车流量、测点距机动车道水平距离分别对测量的道路进行分类,分析不同类型道路两高度噪声测量值的区别。
2.1 按车道数分类比较
分析在不同车道数的条件下,测量高度对噪声测量值的影响。为了不引入其他影响因素,统一采用距离机动车道0.2 m处测得的数据(共77组),详见表2。测量结果表明在路边0.2 m处的点位,90%以上是1.2 m高度的噪声值比4.5 m高度的噪声值高,平均高1.2 dB(A),最大的一组高2.8 dB(A)。仅在10车道时出现了几组反例,4.5 m高度的噪声值反而高于1.2 m高度。
按车道数分类,计算不同车道数道路的两测点高度噪声差值的平均值。结果表明,此差值随着道路车道数的增加逐渐减小,由2车道的1.8 dB(A),降至10车道时0.0 dB(A)。这是因为一方面,1.2 m高度比4.5 m高度的测点与声源距离更近,声源能量几何发散衰减较小,使总体上1.2 m高度声级较高。另一方面,远车道的噪声在传播到测点的途径中,1.2 m高度受地面吸收等影响衰减较强,4.5 m高度主要是直达声衰减较小。因此车道数较多时, 4.5 m声级升高得比1.2 m高度多。综合这两方面的原因,就出现了道路车道数较多时,1.2 m高度与4.5 m高度差距减小的现象。
因此,测量高度提高后噪声监测结果的变化与测量道路的车道数有密切关系。对于测点布设在路边0.2 m的情况,2~10车道平均声级变化范围是0~1.8 dB(A)。
2.2 按车流量分类比较
车流量是道路交通噪声强度的关键性影响因素之一。与上节相同,分析两高度噪声差值与其关系时也统一使用距离为0.2 m处的测量数据以便比较。试验中测量了大型、小型车流量。按照国标《汽车加速行驶车外噪声限值及测量方法》(GB 1495—2002),每辆大型车的噪声排放可相当于8辆小型车。按此将大型车流量折算为小型车后,与测量的小型车流量相加,得到总车流量。
并且,车流量与车道数有一定关联。比如道路行驶车辆接近饱和时,车道数越大往往车流量越高。为了去除车道的影响,分析时用总车流量除以车道数,得到每车道平均车流量,反映了道路的车流密度。
将两高度噪声差值随每车道平均车流量之间的变化趋势做图得图2,数据分布较均匀并没有呈现明显趋势。为了进一步分析,将测量数据按每车道平均车流量分为五档,计算每档的两高度噪声平均差值:当每车道平均车流量小于400辆/小时时,差值是1.4dB(A);当每车道平均车流量为400~500辆/小时时,差值是1.3 dB(A);当每车道平均车流量为500~600辆/小时时,差值是1.1 dB(A);当每车道平均车流量大于600辆/小时时,差值是1.0 dB(A)。因此,两高度噪声平均差值随每车道平均车流量的增加递减,但降低幅度很小。
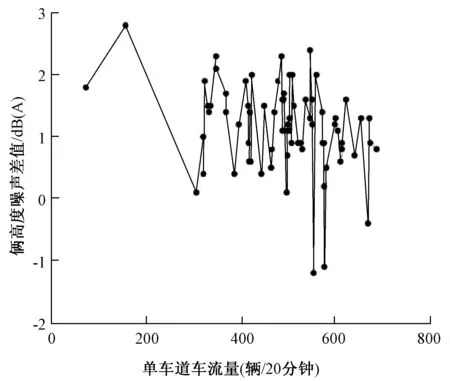
图2 两高度噪声差值随车流量分布图
同时,计算两高度噪声差值与每车道平均车流量之间的相关性,两者相关系数仅为-0.33,存在弱的负相关。因此,每车道平均车流量是两高度噪声差值的一个较弱的影响因素。
2.3 按距机动车道水平距离分类比较
部分道路由于自身结构,布设道路交通噪声自动监测点位时与机动车道边沿间隔了一定距离(见图1b)。在试验中测量的132条道路,因存在有无非机动车道或应急车道以及车道宽窄等区别,与机动车道较近边界的水平距离有0.2、2、3、4、6、8 m多种情况,基本涵盖了大部分道路结构类型。此节分析这类监测点位在监测高度改变后噪声数据变化情况。按测点距路沿不同水平距离把测量的道路分为6类,计算每类两高度噪声差值的平均值:距离路沿0.2、2、3 m处,1.2 m高度噪声值较高,两高度噪声差值的绝对值分别是1.2、0.2、0.7 dB(A);距离路沿4、6、8 m处,4.5 m 高度噪声值较高,两高度噪声差值的绝对值分别是1.5、1.3、0.9 dB(A)。
对比其结果,发现距离远近不同时,测量高度提升后噪声变化趋势相反:距离机动车道水平距离在3 m内,1.2 m高度平均声级较高;距离较远为4~8 m时,是4.5 m高度平均声级较高。测点高度提升时测量值的平均改变量分别是-1.5~1.2 dB(A)。
2.4 两高度水平距离衰减对比
为了进一步验证上节结论并分析其原因,选择了车道数相近(4~6车道)、车流稳定的3条典型道路,道路一在0.2、6 m处测量,道路二在0.2、8 m处测量,道路三在0.2、10 m处测量。同条道路在距道路边沿不同距离两点测量时道路交通声源强度接近,因此测点与机动车道的水平距离是声级变化的主要原因。测量结果见表3。三组测量结果都符合之前的规律:即对于同一条道路,距离0.2 m处是1.2 m高度噪声值较高,点位后移到距离6~10 m处则是4.5 m高度噪声值较高。
分析此现象产生的原因:在水平距离0.2 m处,4.5 m高度测点与近车道声源的距离是1.2 m高度的2倍以上,因噪声能量几何发散而声级较低。但测点水平距离增加后,高1.2 m与4.5 m相比较,距声源相对较近,几何发散衰减快;且噪声在1.2 m高度传播中更易受遮挡,逐渐变为4.5 m高度声级更大。
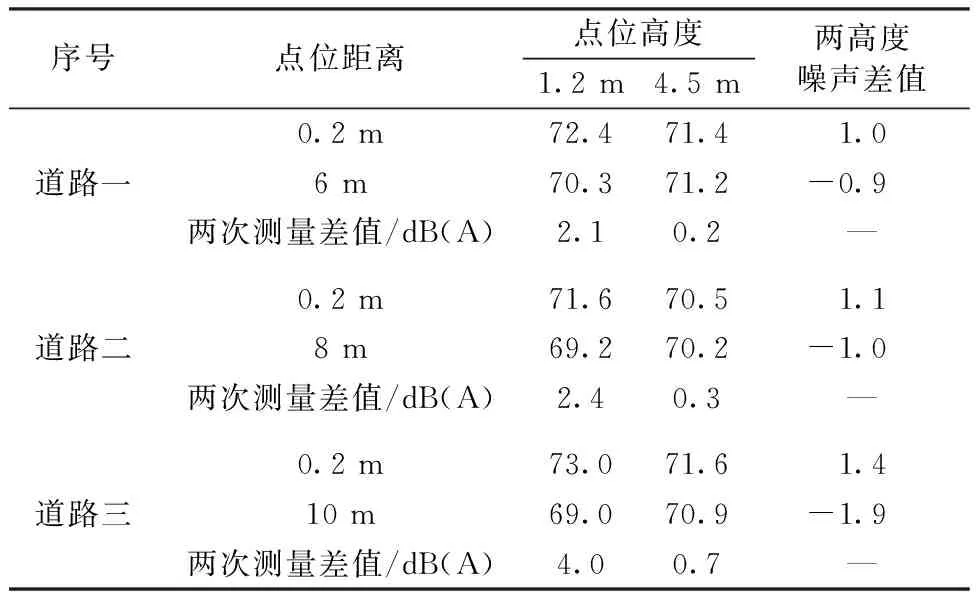
表3 不同距离的高度对比试验数据 dB(A)
注:“—”表示无数值。
另外,比较两次测量之间1.2、4.5 m高度噪声值变化情况。三组试验中,1.2 m高度两次测量变化量分别是2.1、2.4、4 dB(A),而4.5 m高度两次测量变化量是0.2、0.3、0.7 dB(A)。说明道路交通噪声在道路两侧的分布特点是4.5 m高度的噪声值随水平距离变化量更小,相对更稳定。
3 结论
通过该次的道路交通噪声测点高度试验,结果表明,在监测高度从手工监测时的1.2 m提高到自动监测时的4.5 m后,监测的道路交通噪声值均出现了明显变化。声级是升高或降低,以及变化幅度主要取决于道路车道数和测点距机动车道距离这两个因素。据试验统计,不同类型道路的监测结果变化范围均在± 3 dB(A)以内。考虑到现行道路交通噪声评价的标准中,每2 dB(A)划分为一个噪声等级,因此点位提高后,会造成道路交通噪声级别在小范围内更改。另外,此次试验结果也表明4.5 m高度噪声值随距机动车道水平距离增加衰减较小,可更灵活选择布点位置。
[1] 马蔚纯,林健枝,沈家,等.高密度城市道路交通噪声的典型分布及其在战略环境评价(SEA)中的应用[J].环境科学学报,2002,22(4):514-518.
[2] HJ 640—2012 环境噪声监测技术规范 城市声环境常规监测[S].
[3] 刘砚华.环境噪声监测的现实与未来[J].环境保护,2011,7:25-26.
[4] 秦勤,张斌,段传波,等.环境噪声自动监测系统研究进展[J].中国环境监测,2007,23(6):38-40.
[5] 刘砚华,张朋,李文君,等.道路交通噪声自动监测中最少监测时间研究[J].中国环境监测,2010,26(4):52-54.
[6] European Commission.Position paper on EU noise indicators:A report produced for the European Commission[M].Luxembourg:Office for Official Publications of the European Communities,2000.
[7] 张远东.环境噪声自动监测技术问题的浅究[J].自动化技术与应用,2012,31(5):82-84.
[8] 方孝华,陈潇江.功能区噪声自动监测点位布设探讨[J].环境监测与预警,2010,2(4):23-25.
