基于Kalman滤波的无线传感器网络多目标跟踪*
2014-03-27夏候凯顺叶小朋余辉荣邬依林
夏候凯顺 , 严 娟,叶小朋,余辉荣, 邬依林,2
(1. 华南理工大学 自动化科学与工程学院,广东 广州 510640;2. 广东第二师范学院 计算机科学系,广东 广州 510310)
无线传感器网络是由大量具有有限能量和内存的静止或移动的传感器以自组织和多跳路由的动态拓扑方式构成的无线网络[1],它集成了传感器技术、嵌入式计算机技术、数据融合技术和短距离无线通信技术,可以实现数据的采集、处理和传输功能,在军事、环境、医疗、农业等领域有着广泛的应用前景[2-4]。无线传感器网络中的目标定位跟踪的优化问题是当前的研究热点,但是关于这方面的研究主要还是集中在理论研究上[5-7],而缺少实际物理系统的验证。因此,本文搭建了多目标实时跟踪系统的实验平台,以实现对理论算法的验证和优化。
系统在运行过程中,存在多种因素影响跟踪性能,例如时钟同步[8]、传感器干扰[9]、信道冲突[10]、网格切换和定位算法等[11],针对这些因素,本文提出相应的事件辅助机制和策略。卡尔曼滤波器是一种高效率的递归滤波器[12],它能够从一系列不完全及包含噪声的测量中,估计出动态系统的状态,在目标定位跟踪和轨迹预测方面有着广泛应用。为了提高系统的跟踪性能,结合辅助机制和策略对Kalman滤波算法进行了改进。
1 实验平台简介
实验平台由检测层、网络层和数据服务中心三部分组成,系统框架如图1所示。12个网络节点均匀分布组成了一个4 m×6 m,坐标从(0,0)到(400,600)的监视区域,将监视区域划分为6个网格,每个网格大小为2 m×2 m,包含4个节点。
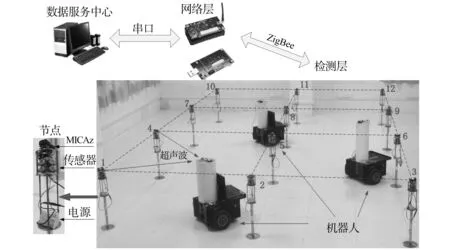
图1 实验平台系统框架图Fig.1 Block diagram of the test bed
检测层由12个传感器节点组成,每个节点有6个有效测量角度为60°的SRF08超声波传感器,6个传感器可实现360°全方位测量。传感器运用TOF(Time of Flight)方法测距[13],传感器发出超声波,声波遇到障碍物后发生反射,反射回来的声波再被传感器接收,计算前后时间差求得目标与节点的距离值。同时,为提高传感器的稳定性和可靠性,设置一个时间限制,仅在有限的时间内接收的声波才被认为是有效的。
网络层采用MPR2400无线通信模块和MIB520网关模块,包括基站和子站,与数据服务中心连接的部分称为基站,子站则是与传感器节点连接的部分。网络层扮演着网关的角色——所有测量数据与指令均通过它来传输。MPR2400间通过ZigBee协议实现通信,传感器节点的测量值通过网络层传输到数据服务中心。数据服务中心包括一台高性能PC机和大量数据接口,主要进行信息采集和数据融合,产生令牌和控制指令通过网络发送给节点和机器人,并在上位机上实时显示多个目标的移动轨迹。
将分布在监测区域内的移动机器人作为跟踪对象,网络层检测出机器人在网络中的坐标并在上位机上显示,同时数据服务中心根据当前周期机器人的坐标信息生成下一周期的控制指令。机器人一旦收到指令,控制器通过调整两个车轮的速度,达到多机器人协同编队控制的效果,无线传感器网络和机器人形成一个反馈控制网络。
软件开发方面,选择TinyOS操作系统作为MPR2400的软件开发环境,TinyOS用nesC语言编写,能很好地解决传感器网络节点资源有限的问题。数据服务中心程序在Linux操作系统下用C语言编写,上位机软件通过GTK+编译。
2 影响系统跟踪性能的因素
2.1 时钟同步
时钟同步是指全部或部分网络节点的参考时间相同,不同节点保持相同的时钟。时钟同步是分布式无线传感器网络的一项关键技术,其精度将直接影响数据融合的可靠性和整个检测任务的准确性。
2.2 传感器相互干扰
超声波传感器是利用发射和接收超声波的方式进行测距,所有传感器使用相同频率的超声波,如果同时触发多个传感器,很容易造成传感器间互相干扰,影响测量结果的准确性。为此,本文提出一种基于事件驱动的自适应节点调度策略,采用工作令牌机制,实现了同网格的不同传感器节点依次触发,从而解决了传感器的相互干扰问题。
2.3 信道冲突
通信信道是单信道的,基站在每个周期只允许与一个节点进行通信。多目标跟踪时,在节点传感器不相互干扰的情况下系统会同时触发不同网格的节点工作,当这些节点测量完成后若立即将测距值传送至基站,这时信道争用产生冲突。为避免信道冲突,自适应节点调度策略中采用令牌环的通信机制及分时复用的思想。
2.4 网格切换和定位算法
采用传统最小二乘法作为定位算法,是利用多点定位和两点定位相结合的方法。当机器人从一个网格穿越到另一个网格,将不可避免地通过网格的边缘区域,此时传统定位算法无法确定机器人是否穿越了网格。故提出一种辅助的边缘监测策略,当目标运行到网格的边缘区域时启动。
但最小二乘法存在不足之处,即无法实现网格切换时轨迹平滑。粒子滤波和Kalman滤波是两种应用广泛的目标跟踪算法,粒子滤波需要大量的采样数据,对于WSN而言意味着需要消耗大量的通信资源,会影响系统快速性与稳定性。而Kalman滤波每个周期只需要一个观察值即可利用历史数据更新状态,因此本文考虑机器人的位置、速度等运动状态,提出了基于单点观测的扩展Kalman滤波算法。
3 关键技术
3.1 时钟同步和双令牌模式
本文采用单向广播同步方式实现时钟同步。如图2所示,系统初始化时,基站向网络中节点广播一个数据包,当所有节点接收到该数据包后,分别记录各自的本地时间t0作为参考时间。此后,各节点使用相对时间Δt=tcur-t0作为时钟,其中tcur表示各节点当前时间。

图2 单向广播同步方式原理图Fig.2 Unidirectional broadcast synchronized method
另外,多目标实时跟踪系统采用工作令牌和通信令牌相结合的双令牌模式,两个令牌在节点间并行传递,传感器节点在具有工作令牌时才有权限触发声纳完成测距任务,同理,只有获得通信令牌的节点才能启动该节点的无线通信模块完成无线数据传输。利用双令牌工作模式,使节点的测距和通信工作相互独立有序地进行,有效地解决了传感器干扰和信道冲突问题。
3.2 边缘监测策略
如图3所示,假设目标从网格1运动到网格2,当机器人移动到网格1的边缘区域,触发节点1和节点3,开启相应的声纳(红色部分为工作的声纳,有效测量角度为60°,扇形部分为声纳有效测量范围),帮助判断目标是否在网格1或网格2。监测节点和传感器将一直处在工作状态,直至机器人离开边缘区域。

图3 边缘监测策略原理图Fig.3 Edge monitoring strategy
3.3 基于单点观测的EKF模型
(1)
同理,Y轴方向上的状态方程为
(2)
将方程(1)和(2)合并可得
(3)
将连续系统离散化
x[(k+1)T]=

(4)
离散化后的状态方程为
x(k+1)=Gx(k)+Qu(k)=
(5)
设某一时刻k工作节点的坐标为(xa,ya),理论上的距离值为da,则存在以下距离关系:
(6)
其中,[x(k),y(k)]为k时刻机器人的坐标。将式(6)线性化可得
(7)
观测方程为Z(k)=Hx(k),其中Z(k)=da,观测矩阵为
H=[h110h130]
(8)

3.4 基于EKF的自适应节点调度策略
节点调度策略的核心问题在于如何根据当前周期的任务节点有效地预测下一个周期的任务节点,这实际上是一种事件驱动的控制方式,因为目标在整个网络中的实时移动本身就构成了触发网络节点工作的驱动事件。针对这个问题,本文提出一种自适应节点调度策略,将该策略与基于单点观测的扩展Kalman滤波算法结合使用,能实现对机器人的定位跟踪,下面引入扩展Kalman滤波算法。
对于非线性系统而言,为了便于处理,假设过程噪声是可加的,系统定位跟踪的运动模型和观测模型表示如下:
xk=Gxk-1+νk-1
zk=Hxk+wk
(9)
其中,过程噪声νk-1和量测噪声ωk是均值为0,符合高斯正态分布的白噪声序列,协方差阵分别为Qk-1和Rk,标准的Kalman滤波步骤如下:
Step2: 协方差预测Pk|k-1=GPk-1|k-1GT+Qk-1
Step4: 更新测量余量协方差Sk=HPk|k-1HT+Rk
Step7: 更新协方差Pk|k=(I-KkH)Pk|k-1
扩展卡尔曼滤波算法根据机器人在当前周期的状态预测出下一个周期的状态,包括坐标和速度信息,然后根据机器人的坐标预测值,确定机器人所在网格中最近邻的两个或者三个节点作为下一周期任务节点。考虑到目标移动的连续性,若预测任务节点与当前实际工作的任务节点相同的个数大于两者不相同的个数,则认为预测结果有效,同时生成相应的下一工作周期的工作令牌和通信令牌;否则,预测结果被认为是无效的,下一周期仍触发当前周期的工作节点执行测距任务,生成相应的工作令牌和通信令牌。最终,基站将令牌广播给子站,获得工作令牌的节点进行测距,获得通信令牌的节点将测距值传送至数据服务中心,通过定位算法计算出实时坐标。
4 实验结果
实验结果证明了该平台中所应用的各种关键技术和解决方案的有效性。如图4所示,与最小二乘法定位算法相比,基于单点观测并结合边缘监测策略的扩展Kalman滤波算法跟踪效果更好,穿越网格时没有出现迂回现象,轨迹更加平滑准确。在实验平台上进行机器人反馈控制,当3个机器人在监控区域以0.5 m /s 的速度移动时,其跟踪轨迹如图5所示。实验结果表明,该系统可以实时跟踪三个机器人且跟踪性能良好。

图4 目标穿越网格时跟踪效果图Fig.4 Tracking trajectory of crossing grids(a)最小=乘法;(b)扩展kalman滤波算法
扩展Kalman滤波算法能达到如此好的跟踪效果,主要在于它考虑了目标的位置、速度等运动状态。通过纠正目标预测坐标来确定目标位置,且在定位过程中只需一个节点的观测数据就能根据历史值准确定位,减少了计算量和测量周期,提高了系统的跟踪精度。采用节点自适应调度策略,每周期获得工作令牌和通信令牌的节点工作,其余节点处于休眠状态,从而节省了能量。
5 结 论
本文讨论了基于状态预测的自适应网络节点调度策略和基于单点观测的扩展Kalman滤波定位算法,并搭建了一个基于Kalman滤波的无线传感器网络多目标实时跟踪系统实验平台,进行相关实验验证。实验结果表明,该系统具有良好的跟踪性能,从而验证了定位算法和各种辅助机制策略的有效性。

图5 多目标跟踪效果图Fig.5 Performance of multiple targets tracking
但是本系统也存在一些不足之处,例如:① 由于超声波定位的局限性,当多个目标位于同一网格时,系统无法完成对多目标的定位。② 系统采用双令牌的工作方式导致系统的时延较大,影响跟踪的快速性。③ 任务节点随着目标移动发生动态变化,网格切换时新的节点进入旧的节点退出,这种网络传输结构的变化大大增加了通信过程的丢包率。下一步的工作重点是针对多目标跟踪系统不足之处进行改进和完善。
[1] 孙利民, 李建中, 陈渝,等. 无线传感器网络[M]. 北京: 清华大学出版社, 2005.
[2] LIU Qiang, HUANG Xiaohong, LENG Supeng, et al. Deployment strategy of wireless sensor networks for Internet of things[J]. China Communications, 2011, 8(8): 111-120.
[3] 洪锋, 褚红伟, 金宗科,等. 无线传感器网络应用系统最新进展综述[J]. 计算机研究与发展, 2010, 47: 81-87.
[4] 钱志鸿, 王义君. 面向物联网的无线传感器网络综述[J]. 电子与信息学报, 2013, 35(1): 215-227.
[5] LANGENDOEN K, REIJERS N. Distributed localization in wireless sensor networks: a quantitative comparison[J]. Computer Networks, 2003, 43(4): 499-518.
[6] MASAZADE E, NIU R, VARSHNEY P, et al. Energy aware iterative source localization for wireless sensor nelworks[J]. IEEE Transactions on Signal Processing, 2010, 58(9): 4824-4835.
[7] 邓罡, 陈颖文, 徐明,等. 无线传感器网络环境感知的节点定位方法[J]. 中山大学学报:自然科学版,2008, 47(6): 114-119.
[8] WOOHYUK J, YOUNGMI K. Compensated time synchronization in WSN with multiple reference nodes[C]∥International Conference on Networked Computing and Advanced Information Management, 2008: 229-234.
[9] LIN Jiangyong, XIAO Wendong, LEWIS F, et al. Energy-efficient distributed adaptive multi-sensor scheduling for target tracking in wireless sensor networks[J]. IEEE Transaction on instrumentation and measurement, 2009, 58(6): 1886-1896.
[10] LIN Jiangyong, LEWIS F, XIAO Wendong, et al. Accuracy based adaptive sampling and multi-sensor scheduling for collaborative target tracking[C]∥Proceedings of the 9th International Conference on Control, Automation, Robotics and Vision, 2006: 2064-2069.
[11] GUO Qiangmao, FIDAN B, ANDERSON B. Wireless sensor network localization techniques[J]. Computer Networks, 2007, 51(10): 2529-2553.
[12] LIU Yang, SUN Zhendong. EKF-Based adaptive sensor scheduling for target tracking[C]∥IEEE International Symposium on Information Science and Engieering, 2008: 171-174.
[13] HO K, SUN Ming. Passive source localization using time differences of arrival and gain ratios of arrival [J]. IEEE Transactions on Signal Processing, 2008, 56(2): 464-477.