某雷达模拟器的目标与杂波信号模拟强度研究
2014-03-24王付修
王付修,鲁 刚,左 雷,陈 冰
(1.海军陆战学院,广州510430;2.海军装备部,北京100841;3.海军工程大学电子工程学院,武汉430033;4.南京理工大学,南京210094)
复杂电磁环境的训练除利用真实的武器装备外,还大量依靠各类信号模拟器、计算机模拟技术、分布式交互仿真技术以及能模拟假想敌的部队等[1-3]。作战模拟的功能有:①直接或通过导调人员给受训者提供逼真的战场态势信息;②接受受训人员对此态势信息的判断和决策;③通过模拟系统运行结果,对受训人员的反应评估[4]。在进行雷达模拟器的海战场态势环境编辑时,将态势推进过程中目标信号强度、地物杂波强度、气象杂波强度、海杂波强度实时计算,以便信号源产生相应强度的信号注入雷达模拟台。
1 目标信号强度的算法
计算雷达目标在每个时刻的回波信号强度,并将这些数据标注在数据表中,是为了控制目标信号源产生目标信号的大小,以便后端的雷达模拟台能在雷达威力覆盖范围内准确地显示出目标与杂波强度变化。
1.1 目标信号强度计算
距离雷达r 处的目标,在雷达天线口径上单位目标的信号回波功率为[5]

式中:F为传播因子;La为传播损耗;Pr0为理想条件下雷达天线的接收功率,

式(2)中:Pt为雷达发射功率;σ为目标的雷达截面积;λ为雷达波长;R为测量点距雷达距离;G为天线增益。
考虑到目标信号源输出从雷达接收机的中频进行注入,信号所经过前端的各级功率放大增益为Gp,同时将发射支路和接收支路中频注入点之前的损耗Ls计入,得到注入点的信号功率为[6]

Ps为天线波束中轴对准目标时,回波信号在中频放大器输入端处的功率。
1.2 目标反射截面积与大气传播因子计算
1.2.1 目标反射截面积RCS的计算
目标与雷达相对航向不同,RCS(σ)的大小也不同。将相对航向取成8个45°范围,见图1。其中,相对航向落在1、5区时,目标的RCS值为其平均值(dB)的3/4;落在3、7区时,目标的RCS值为其平均值(dB)的5/4;落在其他区域时,RCS为均值。
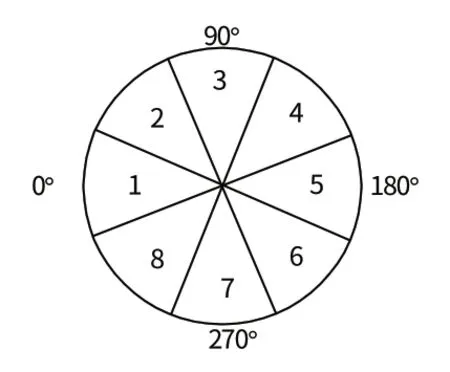
图1 相对航向与目标RCS取值区域示意图Fig.1 Relative heading and target RCS value area
对海面舰船目标,将σ 假设为一个沿高度均匀分布的模型。本文将舰船高度划分5 段,从目标类型表中取出的σ值均匀分布在这5段上,当无大气波导即视距探测时,需要根据目标每个时刻与雷达之间的距离,计算出雷达视距对应的最小发现高度hmin,代入上式的σ 取值应为hmin到舰船最大高度上各段RCS的积分,如图2所示,式(2)中的散射截面积用下式替代:
式(4)中:

hmax由目标类型表给出(高度单位为m,距离单位为km)。
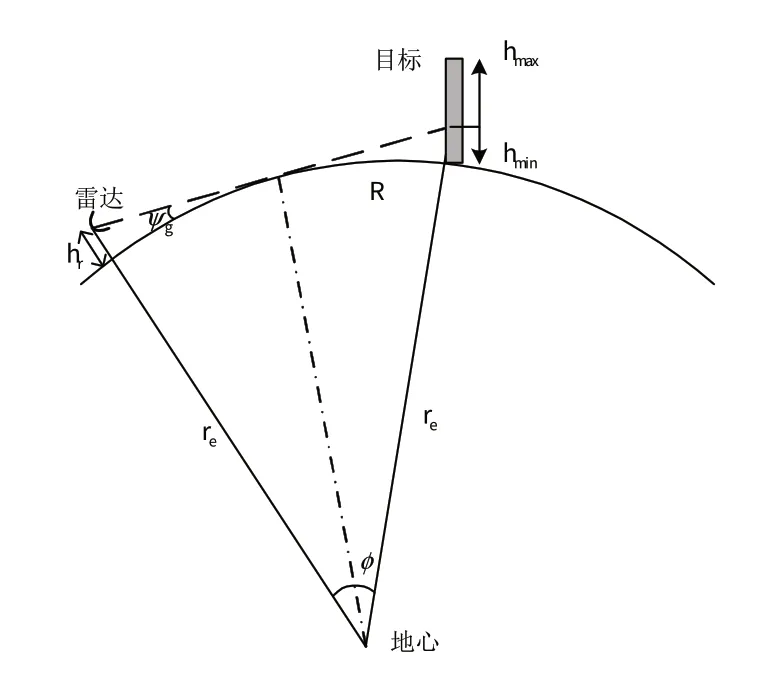
图2 舰船目标的RCS取值方法Fig.2 Value taking method of ship target RCS
对于空中目标,当处于视距以外时,F 设为0。当存在大气波导即超视距探测时,不再计算视距,海面目标的hmin设为0,各个高度上的F值由PE算法的结果决定,La的取值采用曲线量化的方式,并按比例取值的方式查表可得。
1.2.2 传播因子F的确定
对于视距外的目标,不计算F的结果,直接设置为0。当选择大气波导环境时,需根据波导剖面和PE方程计算F;当选择正常大气条件时,为了加快计算速度,不选用PE方法计算F,而采用以下方法计算[7]:

式(6)中:f()θd为天线方向图在目标仰角方向的大小;ρ为海面反射系数的模;α为反射系数引入的相位与直反射波间路程差引入的相位差之和。
反射系数是3部分的乘积,即理想海面反射系数、球面散射因子和海水粗糙度因子。水平极化时,理想海面反射系数为[8]

式(7)中:ψg为掠射角;

ε′、ε″取值与波段和海水温度有关。由于水面舰艇对海搜索雷达架设高度较低,且都是水平极化,因而取反射系数引入的相位为180°,模值为1。
海面粗糙度因子为[9]

式(9)中:λ为电波的波长;hrms为浪高的均方根波高[10],他是海面风速的函数,利用Phillips海浪模式得

式(10)中,Ws2为海面风速,单位取m/s。
球面散射因子为[10]
各符号的定义如图3所示。

图3 球面条件下空中目标与雷达的几何关系Fig.3 Geometrical relation between airborne target and radar under spherical model
直达波与海面反射波之间波程差为[11]

式(12)中:


而[12]:

至此,传播因子F 中的反射系数的模和相位分别为[13]:

为了确定天线方向图在目标仰角方向的大小(f(θd)的形状由雷达参数给出),需要求解θd[14]:

2 杂波信号强度的算法
2.1 海区背景的确定
海区背景提前由专用软件制作。海区的背景画面采用对应海图如图4所示,实际存储的海图是为了控制杂波信号源产生对应强度的杂波信号。因此,对应海图按分辨单元存储了一幅反射率值图,存储方式如表1所示。
存储一幅海区反射率图所需的存储器大小为


图4 态势运行中海区背景示意图Fig.4 Schematic of sea background in situation modeling

表1 地物参数表(分辨率为10″x10″)Tab.1 Ground parameter table
2.2 地面反射率的计算
地面反射率是态势软件选择训练海区时,事先由专用软件填充进海图的各个分辨单元的,而填充的值,是将计算好的反射率值,随机抽取填进海图中。反射率值的计算采用如下经验公式进行[15]:

式(25)、(26)中:γ10取-14 dB;ψ为擦地角,其值在0~50°内;f为雷达中心频率(GHz);分辨率取0.2°。计算好250个值后,随机抽取填进海图中的陆地单元。
2.3 地物单元运动要素的计算
由于本舰是运动的,因而在每个时刻时,地物相对于雷达是按极坐标分辨单元进行回波强度计算的。为减少运算量,分辨单元不按雷达真实分辨单元考虑,由于远区地物一般在视距外,因而方位分辨率低一些不会影响视觉效果。计算每个海区背景单元相对于雷达的运动要素流程如下:选择雷达每一个距离方位单元中心坐标(2048×512),对其进行直角坐标变换,提取变换后落入的海图直角坐标分辨单元的反射率值,将此值作为该雷达分辨单元的反射率值,雷达分辨单元的面积计算公式为[16]

式(27)中:c为电磁波传播速度;τ为雷达脉冲宽度;θ0.5为半功率波瓣宽度。
运动参数采样间隔时间规定为:当雷达平台做直线运动时,时间采样间隔为5 min,当雷达平台机动时,时间采样间隔为6 s。地物杂波运动参数表如表2所示。

表2 地物杂波运动参数表Tab.2 Parameter table of moving ground clutter
2.4 地物单元回波强度的计算
在雷达阵面内,每个雷达分辨单元的回波功率为

杂波信号注入点的信号功率为

3 海杂波信号强度的算法
通过环境设定的风速,首先计算出海面发射率;进而计算雷达每个分辨单元的RCS;最后,再计算出平均回波信号的大小。
通过风速可以计算平均波高[17]:

式中,v为风速/(m/s)。
风速因子Aw为

进一步计算粗糙度因子:

式中,ψ为波束擦地角[18]。
风向因子和干涉因子为[19]:

式(33)、(34)中,φ为雷达天线轴与逆风向间的夹角。
最后,可以计算出水平极化时的海杂波后向散射系数:

得到了散射系数,就可以求出平均海杂波强度。
4 气象杂波信号强度的算法
雨雪区域自身的运动速度与方向同风速与风向,各个分辨单元相对雷达的径向运动速度和强度存储的表格形式同地物杂波。但每个雷达距离、方位单元的RCS计算方法不同,具体如下。
雷达距离R 处的分辨单元体积的计算[20]

式中,θB、φB分别为天线波束的水平和俯仰半功率波束宽度。
该分辨单元的RCS为

因此,注入到雷达中频接收模块的雨雪杂波信号功率为[21]

5 信号强度的生成
雷达信号源组成如图5所示,由控制计算机、定时器、目标产生器、地物杂波产生器、气象杂波产生器、海杂波产生器、噪声产生器、干扰信号源、航向方位码产生模块、调制与合成模块、STC控制模块组成。
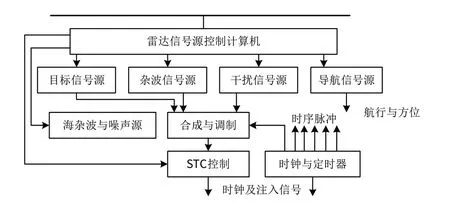
图5 雷达信号源组成Fig.5 Structure of radar signal source
目标信号源产生运动目标,目标信号服从快慢起伏特征,目标回波受对应目标运动径向速度引入的多卜勒频率调制,目标的强度与对应的RCS 大小一致,目标反映在雷达P显上的形状符合实际。杂波信号源产生地物杂波、气象杂波、海杂波信号,杂波的多卜勒谱与模型一致,杂波的强度与实际相符,杂波的形状与模型相符。
信号的合成是将目标、杂波、干扰、接收机噪声等信号源的输出合成,并正交调制到雷达所需的中频输出。同时,该模块产生用于雷达模拟台的中频信号、时钟信号。航行及伺服信号源产生模拟的正北、舰艏、天线真方位、本舰航速或径向速度等信号。
模型控制计算机与信号源产生器的交互控制各路信号强度原理如图6所示。模型控制计算机先进行原始信号强度控制,再进行波束调制。当雷达没有采取信号处理和抗干扰等处理时,各路信号可以直接送雷达显示器进行显示,显示出的各类信号与真实情况基本一致,当雷达工作在某一种或几种信号处理模式时,或抗干扰模式时,模型控制计算机再根据信号处理、抗干扰模式进一步对各路信号分别进行控制,并将控制后的各路信号输出。

图6 模型控制计算机与信号源产生器的交互控制原理图Fig.6 Schematic of interactive control of model-control computer and signal source generator
6 雷达模拟显示结果分析
下面通过雷达实际采集的目标与杂波强度信号在雷达P显的显示效果与应用本文所采用的雷达模拟器目标与杂波强度计算方法在模拟器P显的效果图进行对比,如图7~9所示。

图7 真实目标杂波与模拟目标杂波对比Fig.7 Comparison of real target clutter and simulated target clutter

图8 真实海杂波与模拟海杂波对比Fig.8 Comparison of real sea clutter and simulated sea clutter

图9 真实气象杂波与模拟气象杂波对比Fig.9 Comparison of real weather clutter and simulated weather clutter
通过对比可以看出,本文将在进行雷达模拟器的海战场态势环境编辑时,态势推进过程中目标信号强度、地物杂波强度、气象杂波强度、海杂波强度实时计算出来,同时信号源产生相应强度的信号注入雷达模拟台,在雷达模拟台上能够模拟出目标信号与杂波强度变化,效果十分逼真,能够满足模拟训练的要求。
[1]韩来彬.雷达训练模拟系统训练管理方工程化设计[D].长沙:国防科技大学,2002.
HAN LAISHAN.The training management engineering design of radar simulation training systems[D].Changsha:Nation University of Defense Technology,2002.(in Chinese)
[2]MOLINI L,PARODIAND A,SICCARDI F.Uncertainty in radar simulator measurements on simplified meteorological scenarios[J].Geophysical Research Abstracts,2005,7:06110.
[3]刘承禹,王展.雷达模拟器控制软件的设计与实现[J].现代雷达,2004,26(6):4-7.
LIU CHENGYU,WANG ZHAN.Control software design and implementation of radar simulator[J].Modern Radar,2004,26(6):4-7.(in Chinese)
[4]杨万海.雷达系统建模与仿真[M].西安:西安电子科技大学出版社,2007:4-17.
YANG WANHAI.Modeling and simulation of radar systems[M].Xi’an:Xidian University Press,2007:4-17.(in Chinese)
[5]米切尔R L.雷达系统模拟[M].北京:北京科学出版社,1982:4-18.
MICHELL R L.Radar system simulation[M].Beijing:Beijing Science Press,1982:4-18.(in Chinese)
[6]张明友,汪学刚.雷达系统[M].2 版.北京:电子工业出版社,2005:3-4.
ZHANG MINGYOU,WANG XUEGANG.Radar systems[M].2nd ed.Beijing:Publishing House of Electronics Industry,2005:3-4.(in Chinese)
[7]张伟.雷达系统仿真的理论、方法与应用研究[D].成都:电子科技大学,2004.
ZHANG WEI.The Theory,algorithm and application research of system simulation of radars[D].Chengdu:University of Electronic Science and Technology,2004.(in Chinese)
[8]田佳.雷达模拟器的研究与设计[D].大连:大连海事大学,2008.
TIAN JIA.Research and design of radar simulator[D].Dalian:Dalian Maritime University,2008.(in Chinese)
[9]尹勇,刘秀文,李志华.采用真雷达显示器的航海雷达模拟器的关键技术[J].系统仿真学报,2007,19(5):1014-1017.
YIN YONG,LIU XIUWEN,LI ZHIHUA.Key technologies of navigation radar simulator using real radar monitor[J].Journal of System Simulation,2007,19(5):1014-1017.(in Chinese)
[10]DAVID L A.电子战建模与仿真导论[M].北京:电子工业出版社,2004:221-225.
DAVID L A.Introduction to the modeling and simulation of electronic warfare[M].Beijing:Publishing House of Electronics Industry,2004:221-225.(in Chinese)
[11]缪德刚.航海雷达[M].大连:大连海事大学出版社,1993:156-158.
MIAO DEGANG.Marine radar[M].Dalian:Dalian Maritime University Press,1993:156-158.(in Chinese)
[12]BASSEM R M.Radar system analysis and design using matlab[M].2nd ed.London:Chapman and Hall/CRC,2005:250-300.
[13]CUI XIAOHAI,ZENG TAO,LONG TENG.Modeling and simulation of video target echo and clutter for HLAbased radar system[C]//7th International Conferences on Signal Processing Proceedings.2004:2049-2052.
[14]PLANT W P.A new interpretation of sea surface slope probability density functions[J].Geophysical Research,2003,108(C9):3295-3298.
[15]丁鹭飞,耿富录.雷达原理[M].3 版.西安:西安电子科技大学出版社,2002:128-130.
DING LUFEI,GENG FULU.Principle of radar[M].3rd ed.Xi’an:Xidian University Press,2002:128-130.(in Chinese)
[16]卫健,陈定阶.雷达目标模拟器[J].现代雷达,2000(1):55-57.
WEI JIAN,CHEN DINGJIE.Radar target simulator[J].Modern Radar,2000(1):55-57.(in Chinese)
[17]MERRILL I S.雷达手册[K].北京:电子工业出版社,2003:2-3.
MERRILL I S.Radar manual[K].Beijing:Publishing House of Electronics Industry,2003:2-3.(in Chinese)
[18]张英俊.电子海图的数学和算法基础[M].大连:大连海事大学出版社,2001:112-113.
ZHANG YINGJUN.Math and algorithm basis of electronic chart[M].Dalian:Dalian Maritime University Press,2001:112-113.(in Chinese)
[19]谢雪康,杨晓蓉.一种雷达模拟信号的产生方法[J].电子信息对抗技术,2009,24(3):56-61.
XIE XUEKANG,YANG XIAORONG.A generation approach of simulated radar signal[J].Electronic Information Warfare Technology,2009,24(3):56-61.(in Chinese)
[20]翁晓明.多功能雷达目标回波模拟器显示、控制系统的实现[D].南京:南京理工大学,2010:1-5.
WENG XIAOMING.The realization of display and control in multifunctional radar target echo simulator[D].Nanjing:Nanjing University of Science and Technology,2010:1-5.(in Chinese)